") 無人駕駛中的各種感知傳感器應(yīng)用
無人駕駛中的各種感知傳感器應(yīng)用
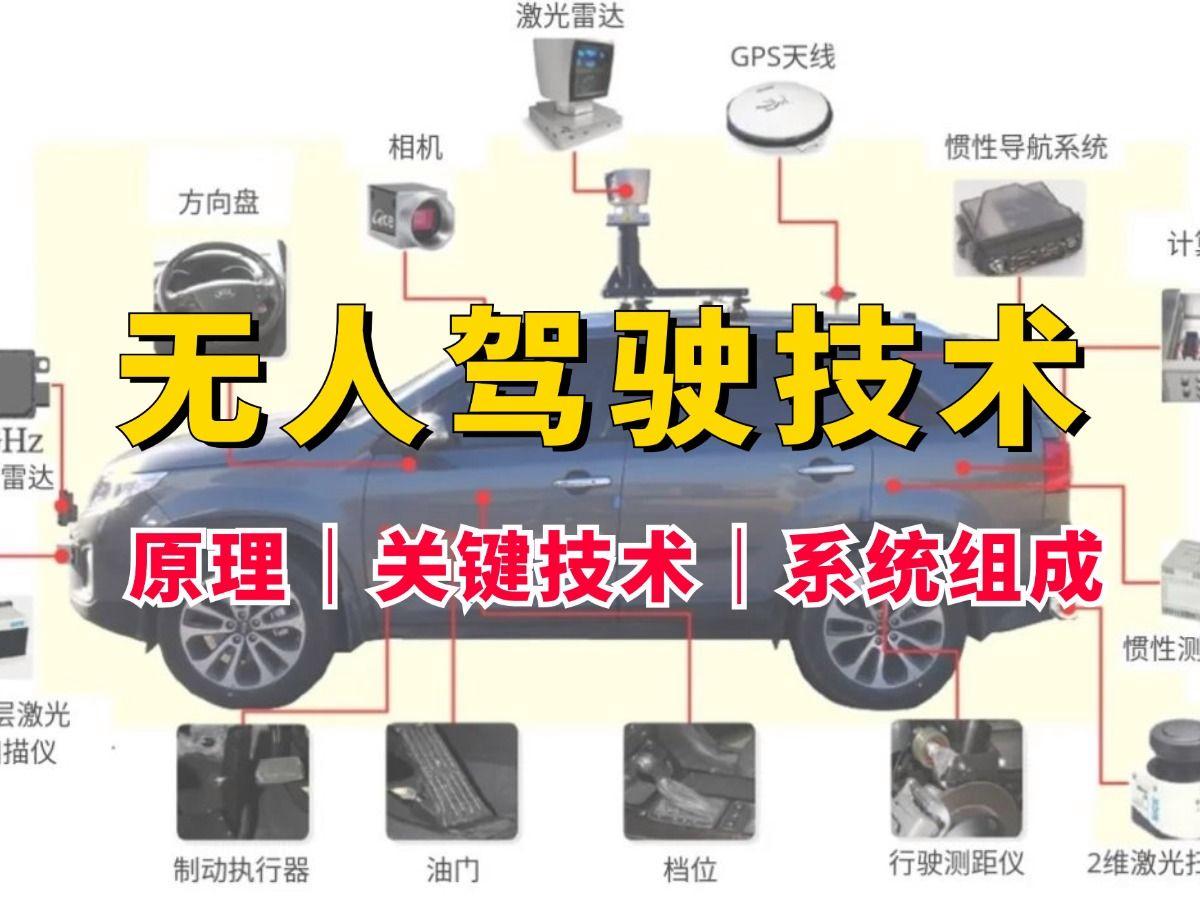
無人駕駛感知傳感器包括:攝像頭、激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)。
1、攝像頭
攝像頭可分為數(shù)字?jǐn)z像頭和模擬攝像頭兩大類。數(shù)字?jǐn)z像頭可以將視頻采集設(shè)備產(chǎn)生的模擬視頻信號轉(zhuǎn)換成數(shù)字信號,進(jìn)而將其儲存在計算機(jī)里。模擬攝像頭捕捉到的視頻信號必須經(jīng)過特定的視頻捕捉卡將模擬信號轉(zhuǎn)換成數(shù)字模式,并加以壓縮后才可以轉(zhuǎn)換到計算機(jī)上運(yùn)用。數(shù)字?jǐn)z像頭可以直接捕捉影像,然后通過串、并口或者USB接口傳到計算機(jī)里。
分辨率:用于度量位圖圖像內(nèi)數(shù)據(jù)量多少的一個參數(shù),通常表示成dpi(dot per inch,每英寸點(diǎn))。簡單地說,攝像頭的分辨率是指攝像頭解析圖象的能力,也即攝像頭的影像傳感器的像素數(shù)。
攝像頭的工作原理大致為景物通過鏡頭(LENS)生成的光學(xué)圖像投射到圖像傳感器表面上,然后轉(zhuǎn)為電信號,經(jīng)過A/D [1] (模數(shù)轉(zhuǎn)換)轉(zhuǎn)換后變?yōu)閿?shù)字圖像信號,再送到數(shù)字信號處理芯片(DSP)中加工處理,再通過USB接口傳輸?shù)?a target="_blank">電腦中處理,通過顯示器就可以看到圖像了。
圖像格式:RGB24,420是最常用的兩種圖像格式。RGB24:表示R、G、B三種顏色各8bit,最多可表現(xiàn)256級濃淡,從而可以再現(xiàn)256*256*256種顏色。
2、激光雷達(dá)
激光雷達(dá)是以發(fā)射激光束探測目標(biāo)的位置、速度等特征量的雷達(dá)系統(tǒng)。激光雷達(dá)是激光技術(shù)與現(xiàn)代光電探測技術(shù)結(jié)合的先進(jìn)探測方式,由發(fā)射系統(tǒng)、接收系統(tǒng) 、信息處理等部分組成。
工作原理是向目標(biāo)發(fā)射探測信號(激光束),然后將接收到的從目標(biāo)反射回來的信號(目標(biāo)回波)與發(fā)射信號進(jìn)行比較,作適當(dāng)處理后,就可獲得目標(biāo)的有關(guān)信息,如目標(biāo)距離、方位、高度、速度、姿態(tài)、甚至形狀等參數(shù),從而對飛機(jī)、導(dǎo)彈等目標(biāo)進(jìn)行探測、跟蹤和識別。它由激光發(fā)射機(jī)、光學(xué)接收機(jī)、轉(zhuǎn)臺和信息處理系統(tǒng)等組成,激光器將電脈沖變成光脈沖發(fā)射出去,光接收機(jī)再把從目標(biāo)反射回來的光脈沖還原成電脈沖,送到顯示器。
激光雷達(dá)(LIDAR)是一種集激光,全球定位系統(tǒng)(GPS)和慣性導(dǎo)航系統(tǒng)(INS)三種技術(shù)與一身的系統(tǒng),用于獲得數(shù)據(jù)并生成精確的地面數(shù)字高程模型(DEM)。LIDAR系統(tǒng)的精確度除了激光本身因素,還取決于激光、GPS及慣性測量單元(IMU)三者同步等內(nèi)在因素。
根據(jù)激光測距原理計算,就得到從激光雷達(dá)到目標(biāo)點(diǎn)的距離,脈沖激光不斷地掃描目標(biāo)物,就可以得到目標(biāo)物上全部目標(biāo)點(diǎn)的數(shù)據(jù),用此數(shù)據(jù)進(jìn)行成像處理后,就可得到精確的三維立體圖像。激光雷達(dá)的主要應(yīng)用于跟蹤,成像制導(dǎo),三維視覺系統(tǒng),測風(fēng),大氣環(huán)境監(jiān)測,主動遙感等方向。
激光雷達(dá)具有高精度、高分辨率的優(yōu)勢,同時具有建立周邊3D模型的前景。
車載激光雷達(dá)又稱車載三維激光掃描儀,是一種移動型三維激光掃描系統(tǒng)。其工作原理就是通過不斷向周圍目標(biāo)發(fā)射探測信號(激光束),并接收返回的信號(目標(biāo)回波)來計算和描述被測量物理的有關(guān)信息,如目標(biāo)距離、方位、高度、姿態(tài)、形狀等參數(shù),以達(dá)到動態(tài)3D掃描的目的。
激光雷達(dá)線束越多,視線越密集,測量的精準(zhǔn)度、分辨率和安全性也就越高。而車載激光雷達(dá)也普遍采用多個激光發(fā)射器和接收器,來建立三維點(diǎn)云圖。車載激光雷達(dá)也并非沒有缺點(diǎn),容易受天氣影響便是其天生缺陷。
但毫米波雷達(dá)穿透煙、霧、灰塵的能力強(qiáng)(波長越長,穿透性越強(qiáng)),類似于,汽車的鹵素大燈與氙氣大燈的區(qū)別,雖然都覺得氙氣燈比鹵素?zé)舾呒壱恍谟暄㈧F霾等能見度低的天氣里,鹵素大燈穿透性卻更好。
3、毫米波雷達(dá)
毫米波雷達(dá)是工作在毫米波波段探測的雷達(dá)。通常毫米波是指30~300GHz頻域(波長為1~10mm)的。毫米波的波長介于微波和厘米波之間,因此毫米波雷達(dá)兼有微波雷達(dá)和光電雷達(dá)的一些優(yōu)點(diǎn)。
同厘米波導(dǎo)引頭相比,毫米波導(dǎo)引頭具有體積小、質(zhì)量輕和空間分辨率高的特點(diǎn)。與紅外、激光、電視等光學(xué)導(dǎo)引頭相比,毫米波導(dǎo)引頭穿透霧、煙、灰塵的能力強(qiáng),具有全天候(大雨天除外)全天時的特點(diǎn)。另外,毫米波導(dǎo)引頭的抗干擾、反隱身能力也優(yōu)于其他微波導(dǎo)引頭 。
毫米波雷達(dá)能分辨識別很小的目標(biāo),而且能同時識別多個目標(biāo);具有成像能力,體積小、機(jī)動性和隱蔽性好,在戰(zhàn)場上生存能力強(qiáng)。毫米波與光波相比傳播時的衰減小,受自然光和熱輻射源影響小。
4、超聲波雷達(dá)
超聲波測距原理是在超聲波發(fā)射裝置發(fā)出超聲波,它的根據(jù)是接收器接到超聲波時的時間差,與雷達(dá)測距原理相似。超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。
超聲波發(fā)生器可以分為兩大類:一 類是用電氣方式產(chǎn)生超聲波,一類是用機(jī)械方式產(chǎn)生超聲波。
深圳市不止技術(shù)有限公司是激光雷達(dá)行業(yè)頭部知名企業(yè),團(tuán)隊自2016年底就開始了多款激光雷達(dá)方案的研發(fā),并創(chuàng)造了30多件發(fā)明專利,我們作為激光雷達(dá)行業(yè)多年的資深老兵,對激光雷達(dá)有著深厚的技術(shù)積累。是一家能提供單點(diǎn)、單線到多線全系列、dtof、itof全品類激光雷達(dá)方案定制化的公司,在激光雷達(dá)核心硬件、專用芯片、AI算法上具有完整的自主知識產(chǎn)權(quán)。(以上轉(zhuǎn)載自網(wǎng)絡(luò)文章)
-
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4505瀏覽量
122179 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4189瀏覽量
191843 -
無人駕駛
+關(guān)注
關(guān)注
99文章
4150瀏覽量
122805 -
工業(yè)相機(jī)
+關(guān)注
關(guān)注
5文章
353瀏覽量
24376
發(fā)布評論請先 登錄
無人駕駛技術(shù)未來在哪里?低速才是突破口

無人駕駛解決方案包含哪些方面?感知、決策與控制
無人機(jī)傳感器線圈的設(shè)計與制造工藝詳解
易控智駕發(fā)布礦山無人駕駛應(yīng)用落地成果
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

小馬智行第六代無人駕駛Robotaxi亮相香港國際機(jī)場
測速雷達(dá)與無人駕駛技術(shù)的結(jié)合 測速雷達(dá)故障排除技巧
一桿有AI的路燈:感知環(huán)境監(jiān)測路況還能“對話”無人駕駛AI燈桿屏

UWB模塊如何助力無人駕駛技術(shù)
無人駕駛車輛的"網(wǎng)絡(luò)秘密",聯(lián)網(wǎng)可不是個簡單的事兒

特斯拉推出無人駕駛Model Y
Robotaxi發(fā)展再加速,智能駕駛傳感領(lǐng)域檢測迎來全新挑戰(zhàn)

5G賦能車聯(lián)網(wǎng),無人駕駛引領(lǐng)未來出行

自動駕駛的傳感器技術(shù)介紹
無人駕駛汽車應(yīng)用晶振TSX-3225






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論