") 神經(jīng)網(wǎng)絡(luò)超體?新國立LV lab提出全新網(wǎng)絡(luò)克隆技術(shù)
神經(jīng)網(wǎng)絡(luò)超體?新國立LV lab提出全新網(wǎng)絡(luò)克隆技術(shù)

神經(jīng)網(wǎng)絡(luò)開發(fā)到 100% 會發(fā)生什么?神經(jīng)網(wǎng)絡(luò)的究極形態(tài)又是什么?何為網(wǎng)絡(luò)超體?上述問題的答案可能可以在電影超體(Lucy)中找到。
在電影中,隨著女主角 Lucy 腦力的逐漸開發(fā),她獲得了以下能力:
10%:能夠控制身體的自主神經(jīng)系統(tǒng),提高身體協(xié)調(diào)能力和反應(yīng)速度。
30%:能夠預(yù)測未來并預(yù)測人們的行動,提高洞察力和判斷力。
50%:能夠通過感知周圍環(huán)境的微小變化來預(yù)測未來的變化。
70%:能夠控制身體和物體的運動,擁有超凡的運動和戰(zhàn)斗技能。
90%:能夠與宇宙和時間相連,擁有靈感和直覺的力量。
100%:能夠?qū)崿F(xiàn)超自然的力量,超越了人類的認(rèn)知極限。
在電影的結(jié)尾,女主逐漸消失并變成了一種純粹的能量形態(tài),最終消失在宇宙中,與宇宙和時間融為一體。人類超體的實現(xiàn)即為連通外界,以獲取無限值的能力。將此思想遷移到神經(jīng)網(wǎng)絡(luò)域,若能建立與整個網(wǎng)絡(luò)的連通,即也可實現(xiàn)網(wǎng)絡(luò)超體, 理論上將獲得無邊界的預(yù)測能力。
即實體化的網(wǎng)絡(luò)必然會限制網(wǎng)絡(luò)性能的增長,而將目標(biāo)網(wǎng)絡(luò)與 Model Zoo 進行連通,此時網(wǎng)絡(luò)不再具備實體,而是一種建立起網(wǎng)絡(luò)之間的連通超體形態(tài)。
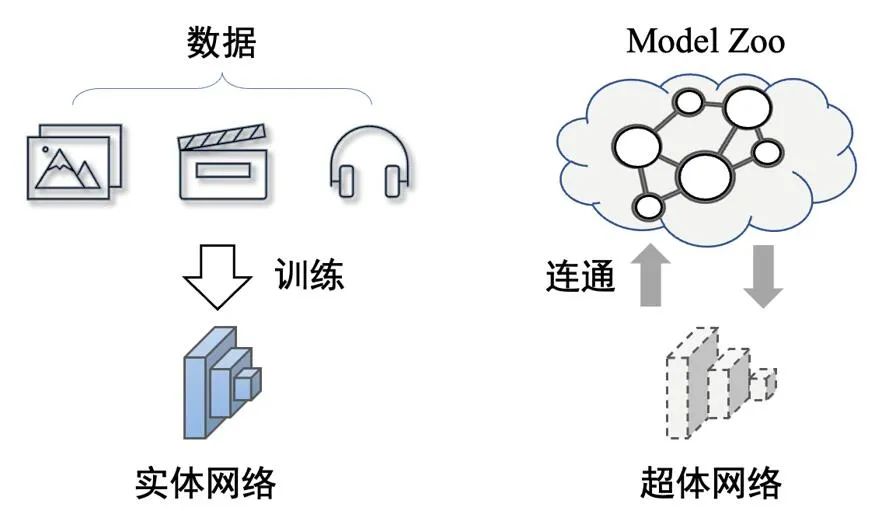
圖上:超體網(wǎng)絡(luò)和實體網(wǎng)絡(luò)的區(qū)別。超體網(wǎng)絡(luò)無實體,是一種網(wǎng)絡(luò)之間的連通形式
該網(wǎng)絡(luò)超體的思想在本文分享 CVPR 2023 論文《Partial Network Cloning》,中得以探索。在該論文中,新加坡國立大學(xué)LV lab提出一種全新的網(wǎng)絡(luò)克隆技術(shù)。
鏈接:https://arxiv.org/abs/2303.10597
01 問題定義
在該文中,作者提到利用該網(wǎng)絡(luò)克隆技術(shù)實現(xiàn)網(wǎng)絡(luò)去實體化可以帶來以下優(yōu)勢:
弱數(shù)據(jù)依賴:只需要部分修正數(shù)據(jù)對一些連接模塊進行修改
低訓(xùn)練復(fù)雜度:僅需 fine-tune 一些連接模塊和任務(wù)預(yù)測模塊
低存儲需求:僅需存儲網(wǎng)絡(luò)的連通路徑,無需存儲整個網(wǎng)絡(luò)
可持續(xù)可恢復(fù):連通路徑可增可減,不對 Model Zoo 進行任何修改
傳輸友好:在網(wǎng)絡(luò)傳輸時僅需傳輸連通路徑信息,無需對整個網(wǎng)絡(luò)傳輸
超體網(wǎng)絡(luò)的實現(xiàn)基礎(chǔ)為迅速擴張的 Model Zoo,海量預(yù)訓(xùn)練模型可供使用。因此對于任意任務(wù) T,我們總能找到一個或多個模型,使得這些已有模型的任務(wù)能組成成所需求任務(wù)。即: (選擇了三個網(wǎng)絡(luò)進行連通)。
(選擇了三個網(wǎng)絡(luò)進行連通)。
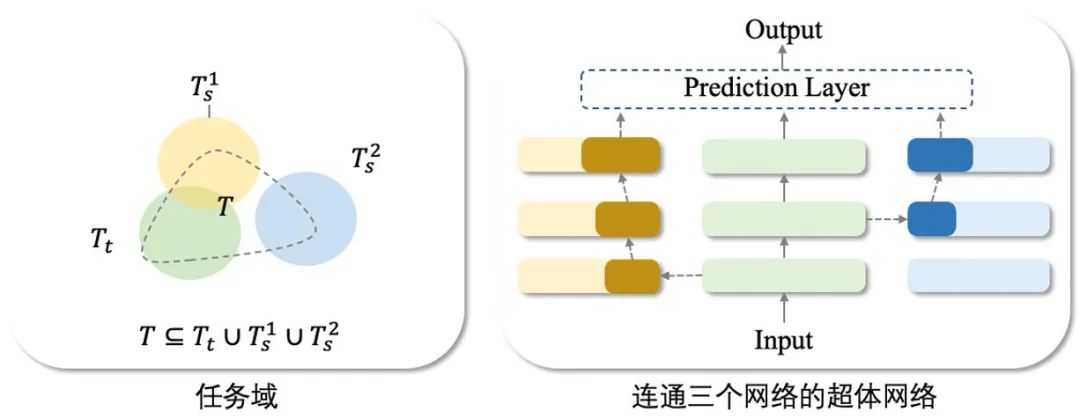
如上圖所示,對于任務(wù) T,為了構(gòu)建對應(yīng)的超體網(wǎng)絡(luò) M_c , 本文提出以下的構(gòu)建框架:
步驟一:定位最合適的本體網(wǎng)絡(luò) M_t ,使得本體網(wǎng)絡(luò) M_t 的任務(wù)集 T_t 與所需任務(wù)集 T 的交集 T?T_t 最大,此時本體網(wǎng)絡(luò)被設(shè)定為主網(wǎng)絡(luò);
步驟二:選擇修正網(wǎng)絡(luò) M_s^1 和 M_s^2,對本體網(wǎng)絡(luò)中缺失的部分任務(wù)進行補充;
步驟三:利用網(wǎng)絡(luò)克隆技術(shù)定位和連通部分修正網(wǎng)絡(luò) M_s^1 和 M_s^2 至本體網(wǎng)絡(luò) M_t;
步驟四:利用部分修正數(shù)據(jù)對網(wǎng)絡(luò)的連通模塊和預(yù)測模塊進行 fine-tune。
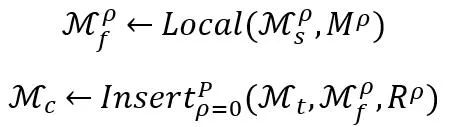
綜上所述,本文提出的構(gòu)建網(wǎng)絡(luò)超體所需的網(wǎng)絡(luò)克隆技術(shù)可以被表示為:

其中 M_s 表示修正網(wǎng)絡(luò)集合,因此網(wǎng)絡(luò)超體的連通形式為一個本體網(wǎng)絡(luò)加上一個或若干個修正網(wǎng)絡(luò),網(wǎng)絡(luò)克隆技術(shù)就是克隆所需要的部分修正網(wǎng)絡(luò),嵌入至本體網(wǎng)絡(luò)中。
具體來說,本文提出的網(wǎng)絡(luò)克隆框架包括以下兩個技術(shù)要點:
對于包含有 P 個修正網(wǎng)絡(luò)的克隆,第一個技術(shù)要點為關(guān)鍵部分定位 Local (?)。由于修正網(wǎng)絡(luò)可能會含有與任務(wù)集 T 無關(guān)的任務(wù)信息,關(guān)鍵部分定位 Local (?) 的目標(biāo)為定位修正網(wǎng)絡(luò)中與任務(wù) T?T_s 相關(guān)的部位,定位參數(shù)用 M^ρ 表示,實現(xiàn)細(xì)節(jié)在第 2.1 小節(jié)中給出。第二個技術(shù)要點為網(wǎng)絡(luò)模塊嵌入 Insert (?),需選擇合適的網(wǎng)絡(luò)嵌入點 R^ρ 嵌入所有的修正網(wǎng)絡(luò),實現(xiàn)細(xì)節(jié)在第 2.2 小節(jié)中給出。
02 方法總覽
在網(wǎng)絡(luò)克隆的方法部分,為了簡化敘述,我們設(shè)定修正網(wǎng)絡(luò)的數(shù)量 P=1(因此省略了修正網(wǎng)絡(luò)的上標(biāo) ρ),即我們連通一個本體網(wǎng)絡(luò)和一個修正網(wǎng)絡(luò)來搭建所需的超體網(wǎng)絡(luò)。
如上文所述,網(wǎng)絡(luò)克隆包含關(guān)鍵部分定位和網(wǎng)絡(luò)模塊嵌入。在這里,我們引入中間的可遷移模塊 M_f 用以輔助理解。即,網(wǎng)絡(luò)克隆技術(shù)在修正網(wǎng)絡(luò)中定位關(guān)鍵部位形成可遷移模塊 M_f,再將可遷移模塊通過軟連接嵌入至本體網(wǎng)絡(luò) M_t。因此,網(wǎng)絡(luò)克隆技術(shù)的目標(biāo)為定位和嵌入具有可遷移性和局部保真性的可遷移模塊。
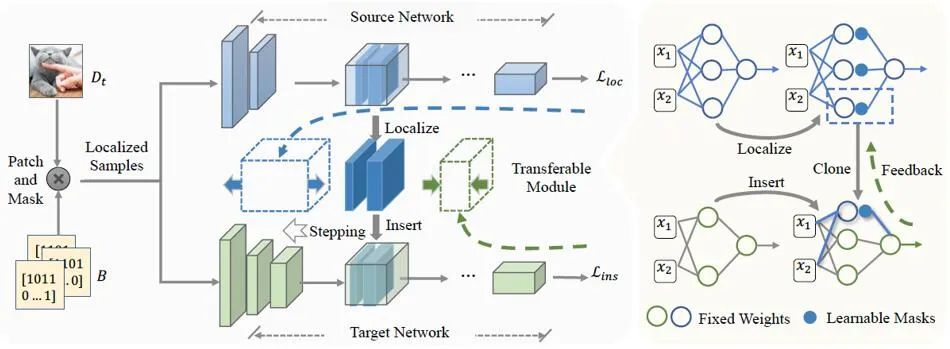
2.1 網(wǎng)絡(luò)關(guān)鍵部位定位
網(wǎng)絡(luò)關(guān)鍵部位定位的目標(biāo)是學(xué)習(xí)選擇函數(shù) M,選擇函數(shù) M 在這里被定義為作用于網(wǎng)絡(luò)每一層 filter 的 mask。此時的可遷移模塊可以被表示為:

在上式中,我們將修正網(wǎng)絡(luò) M_s 表示為 L 層,每一層表示為 。已知可遷移模塊的提取不對修正網(wǎng)絡(luò)做任何修改。
。已知可遷移模塊的提取不對修正網(wǎng)絡(luò)做任何修改。
為了得到合適的可遷移模塊 M_f,我們定位修正網(wǎng)絡(luò) M_s 中對最終預(yù)測結(jié)果做出最大貢獻(xiàn)的顯式部分。在此之前,考慮到神經(jīng)網(wǎng)絡(luò)的黑盒特性,且我們只需要網(wǎng)絡(luò)的部分預(yù)測結(jié)果,因此我們利用 LIME 擬合修正網(wǎng)絡(luò)在所需任務(wù)的局部建模(具體細(xì)節(jié)請查看論文正文)。
局部建模結(jié)果用 來表示,其中 D_t 是所需的部分預(yù)測結(jié)果對應(yīng)的訓(xùn)練數(shù)據(jù)集(小于原始網(wǎng)絡(luò)的訓(xùn)練集)。
來表示,其中 D_t 是所需的部分預(yù)測結(jié)果對應(yīng)的訓(xùn)練數(shù)據(jù)集(小于原始網(wǎng)絡(luò)的訓(xùn)練集)。
因此選擇函數(shù) M 可以通過以下目標(biāo)函數(shù)進行優(yōu)化:

在該式中,定位的關(guān)鍵部分?jǐn)M合局部建模的 G。
2.2 網(wǎng)絡(luò)模塊嵌入
在修正網(wǎng)絡(luò)中定位可遷移模塊 M_f 時,使用擇函數(shù) M 直接從 M_s 中提取,無需修改其權(quán)重。下一步是決定在本體網(wǎng)絡(luò) M_t 中可遷移模塊 M_f 的嵌入位置,以獲得最佳的克隆性能。
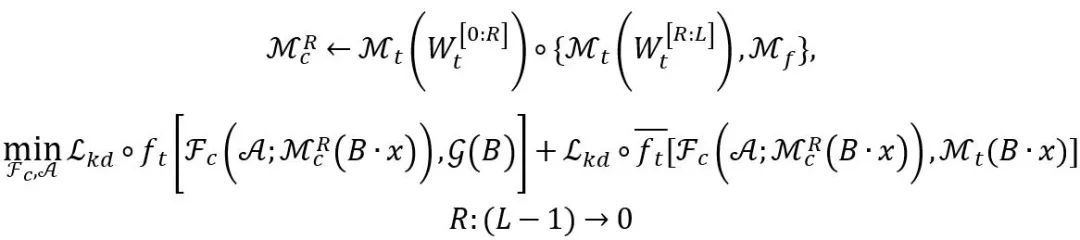
網(wǎng)絡(luò)模塊的嵌入由位置參數(shù) R 控制。遵循大多數(shù)模型重用設(shè)置,網(wǎng)絡(luò)克隆將本體模型的前幾層保留為通用特征提取器,網(wǎng)絡(luò)嵌入過程被簡化為查找最佳嵌入位置(即在第 R 層嵌入可遷移模塊 M_f)。查找嵌入的過程可以表示為:
詳細(xì)的公式解釋請查詢正文。總體來說,基于搜索的嵌入包括以下要點:
最佳位置參數(shù) R 搜索的過程從網(wǎng)絡(luò)的深層到淺層;
在第 R 層進行可遷移性模塊嵌入后的超體網(wǎng)絡(luò) 后,還需額外引入嵌入位置的 Adapter A 和重新 finetune F_c 層(對于分類網(wǎng)絡(luò)來說),但兩者的參數(shù)量相較于整個 model zoo 可以忽略不計;
后,還需額外引入嵌入位置的 Adapter A 和重新 finetune F_c 層(對于分類網(wǎng)絡(luò)來說),但兩者的參數(shù)量相較于整個 model zoo 可以忽略不計;
當(dāng)從網(wǎng)絡(luò)的第 L-1 層至第 0 層建立起連接后,我們粗略的根據(jù)每一次 fine-tune 的 loss 收斂值估計嵌入的性能,選取最小收斂值點作為最終的網(wǎng)絡(luò)嵌入點。
03 網(wǎng)絡(luò)克隆技術(shù)的實際應(yīng)用
本文提出的網(wǎng)絡(luò)克隆技術(shù)的核心為建立起預(yù)訓(xùn)練網(wǎng)絡(luò)之間的連通路徑,不需要對預(yù)訓(xùn)練網(wǎng)絡(luò)進行任何參數(shù)的修改,它除了可以用作搭建網(wǎng)絡(luò)超體的關(guān)鍵技術(shù),也能被靈活的運用到各種實際場景中。
場景一:網(wǎng)絡(luò)克隆技術(shù)使得 Model Zoo 在線使用成為可能。在一些資源有限的情況下,用戶可以在不下載預(yù)訓(xùn)練網(wǎng)絡(luò)到本地的情況下靈活地利用在線的 Model Zoo。
注意到克隆后的模型是由 確定的,其中 M_t ?和M_s 在整個過程中都是固定且不變的。模型克隆對預(yù)訓(xùn)練模型上沒有進行任何修改,也沒有引入新模型。模型克隆使得 Model Zoo 中任何功能組合都成為可能,這也有助于維護 Model Zoo 的良好生態(tài)環(huán)境,因為建立連接使用 M 和 R 是一種簡單的 mask 和定位操作,易于撤銷。因此,提出的網(wǎng)絡(luò)克隆技術(shù)支持建立一個可持續(xù)的 Model Zoo 在線推理平臺。
確定的,其中 M_t ?和M_s 在整個過程中都是固定且不變的。模型克隆對預(yù)訓(xùn)練模型上沒有進行任何修改,也沒有引入新模型。模型克隆使得 Model Zoo 中任何功能組合都成為可能,這也有助于維護 Model Zoo 的良好生態(tài)環(huán)境,因為建立連接使用 M 和 R 是一種簡單的 mask 和定位操作,易于撤銷。因此,提出的網(wǎng)絡(luò)克隆技術(shù)支持建立一個可持續(xù)的 Model Zoo 在線推理平臺。
場景二:經(jīng)由網(wǎng)絡(luò)克隆生成的網(wǎng)絡(luò)具備更好的信息傳輸形式。當(dāng)進行網(wǎng)絡(luò)傳輸時,該技術(shù)可以減少傳輸延遲和損失。
在進行網(wǎng)絡(luò)傳輸時,我們只需要傳輸集合 ,結(jié)合公共 Model Zoo,接收方可以恢復(fù)出原始網(wǎng)絡(luò)。與整個克隆后的網(wǎng)絡(luò)相比,
,結(jié)合公共 Model Zoo,接收方可以恢復(fù)出原始網(wǎng)絡(luò)。與整個克隆后的網(wǎng)絡(luò)相比, 非常小,因此可以減少傳輸延遲。如若 A 和 F_c 仍然存在一些傳輸損失,接收方可以通過在數(shù)據(jù)集上進行 fine-tune 來輕松修復(fù)。因此,網(wǎng)絡(luò)克隆為高效傳輸提供了一種新形式的網(wǎng)絡(luò)。
非常小,因此可以減少傳輸延遲。如若 A 和 F_c 仍然存在一些傳輸損失,接收方可以通過在數(shù)據(jù)集上進行 fine-tune 來輕松修復(fù)。因此,網(wǎng)絡(luò)克隆為高效傳輸提供了一種新形式的網(wǎng)絡(luò)。
04 實驗結(jié)果
我們在分類任務(wù)上進行了實驗驗證。為了評估可遷移模塊的局部性能表征能力,我們引入了條件相似性指標(biāo):

其中 Sim_cos (?) 表示余弦相似性。
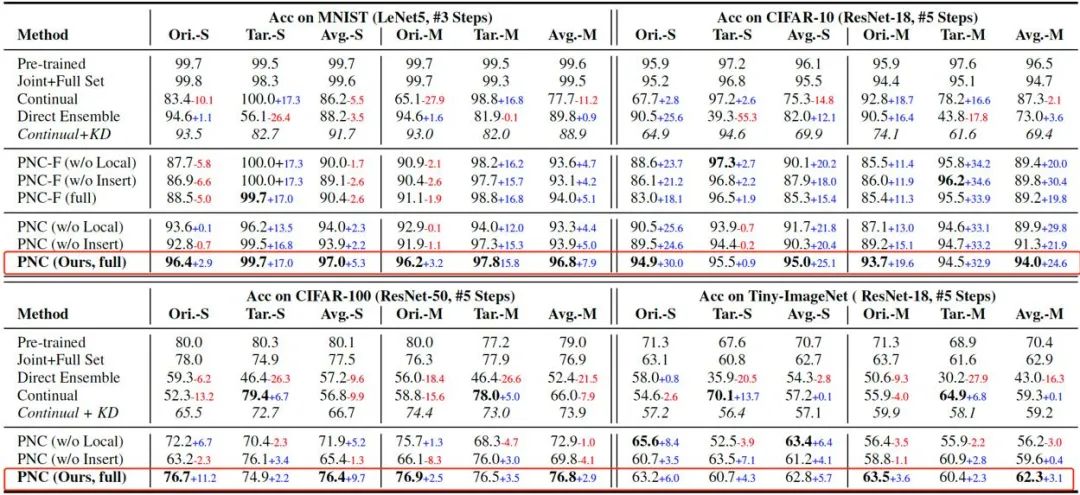
上表中給出了在 MNIST,CIFAR-10,CIFAR-100 和 Tiny-ImageNet 上的實驗結(jié)果,可以看出網(wǎng)絡(luò)克隆(PNC)得到的模型的性能提升最為顯著。且若進行整個網(wǎng)絡(luò)的 fine-tune(PNC-F)并不會帶來網(wǎng)絡(luò)性能的提升,相反,它會增加模型的 bias。
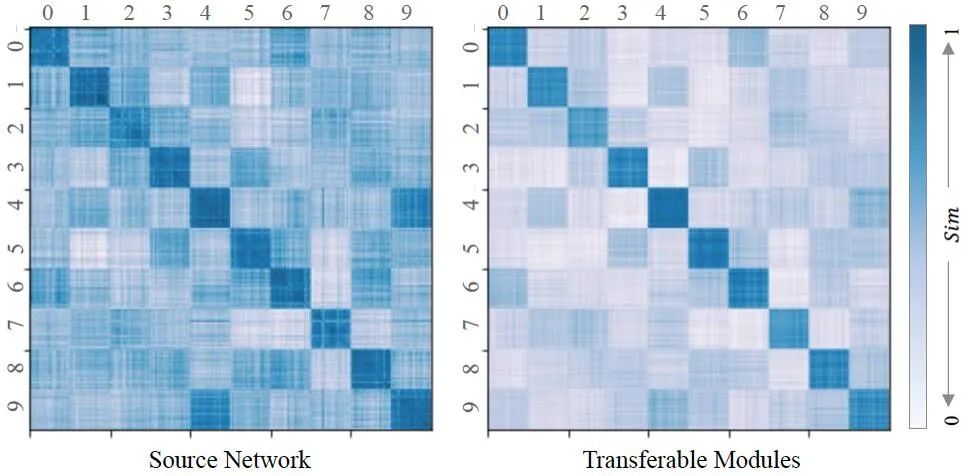
除此之外,我們對可遷移模塊的質(zhì)量進行了評估(如上圖)。從圖(左)可以看出,從每個子數(shù)據(jù)集中學(xué)習(xí)的每個功能或多或少是相關(guān)的,這顯示出從修正網(wǎng)絡(luò)中提取和定位局部功能的重要性。對于可遷移模塊,我們計算其相似度 Sim (?)。圖(右)顯示,可遷移模塊與待克隆的子數(shù)據(jù)集在相似性上很高,其與其余子數(shù)據(jù)集的關(guān)系被削弱(非對角線區(qū)域用比源網(wǎng)絡(luò)的矩陣圖淺的顏色標(biāo)記)。因此,可以得出結(jié)論,可遷移模塊成功地模擬了要克隆的任務(wù)集上的局部性能,證明了定位策略的正確性。
05 總結(jié)
本文研究了一種新的知識轉(zhuǎn)移任務(wù),稱為部分網(wǎng)絡(luò)克隆(PNC),它以復(fù)制粘貼的方式從修正網(wǎng)絡(luò)中克隆參數(shù)模塊并將其嵌入到本體網(wǎng)絡(luò)中。與以往的知識轉(zhuǎn)移設(shè)置不同(它們依賴于更新網(wǎng)絡(luò)的參數(shù))我們的方法保證所有預(yù)訓(xùn)練模型的參數(shù)不變。PNC 的技術(shù)核心為同時進行網(wǎng)絡(luò)關(guān)鍵部位定位和可遷移模塊嵌入操作,兩個步驟相互加強。
我們在多個數(shù)據(jù)集上展示了我們的方法在準(zhǔn)確性和可遷移性指標(biāo)的突出結(jié)果。
審核編輯 :李倩
-
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4812瀏覽量
103284 -
網(wǎng)絡(luò)
+關(guān)注
關(guān)注
14文章
7801瀏覽量
90681 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25377
原文標(biāo)題:CVPR 2023 | 神經(jīng)網(wǎng)絡(luò)超體?新國立LV lab提出全新網(wǎng)絡(luò)克隆技術(shù)
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯(lián)網(wǎng)技術(shù)研究所】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
詳解深度學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)與卷積神經(jīng)網(wǎng)絡(luò)的應(yīng)用

神經(jīng)網(wǎng)絡(luò)教程(李亞非)
全連接神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)有什么區(qū)別
卷積神經(jīng)網(wǎng)絡(luò)如何使用
【案例分享】基于BP算法的前饋神經(jīng)網(wǎng)絡(luò)
【案例分享】ART神經(jīng)網(wǎng)絡(luò)與SOM神經(jīng)網(wǎng)絡(luò)
人工神經(jīng)網(wǎng)絡(luò)實現(xiàn)方法有哪些?
如何構(gòu)建神經(jīng)網(wǎng)絡(luò)?
基于BP神經(jīng)網(wǎng)絡(luò)的PID控制
卷積神經(jīng)網(wǎng)絡(luò)模型發(fā)展及應(yīng)用
克隆技術(shù)介紹
什么是模糊神經(jīng)網(wǎng)絡(luò)_模糊神經(jīng)網(wǎng)絡(luò)原理詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論