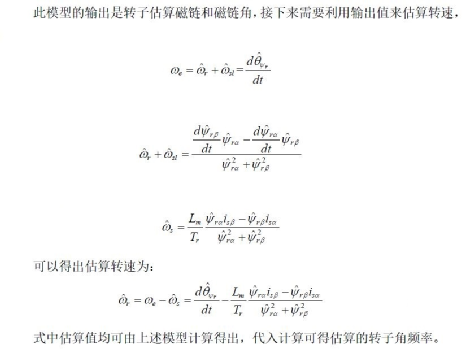
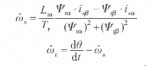
 異步電機速度估計-混合模型磁鏈觀測器法
異步電機速度估計-混合模型磁鏈觀測器法
導讀:本期文章主要介紹異步電機速度估計的方法-混合模型磁鏈觀測器法。對該方法的原理進行簡單介紹和進行仿真驗證。
一、引言
異步電機矢量控制是實現高性能調速的基礎,利用傳感器可獲取電機轉速和磁鏈角度位置信息,但傳感器一般成本較高,且測量精度受環境影響,數值可靠性不高,因此IM 無位置傳感器技術成為研究熱點,此技術的算法核心是速度估算和磁鏈觀測。一般操作流程是,在調試良好的IM 雙閉環基礎上,加入無速度控制算法進行開環仿真,驗證算法合格性,速度估算和磁鏈觀測正常后進行閉環控制,最后調試系統參數完成閉環仿真。
二、原理介紹
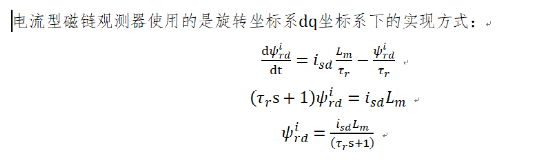
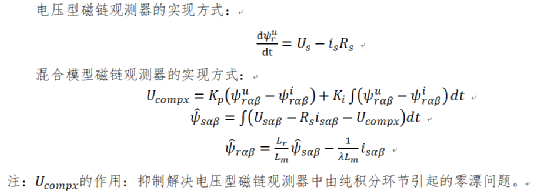
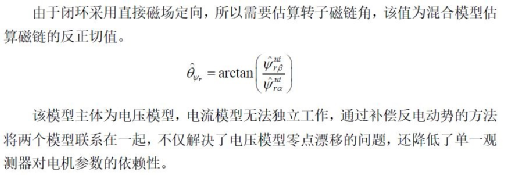
分別采用電壓模型和電流模型的異步電機直接磁場定向控制在低速和高速時估計的轉子磁鏈精度不高.在這基礎上研究電壓電流混合模型的閉環轉子磁鏈觀測器,使其在低速時采用電流模型,在高速時采用電壓模型,兩者能平滑過渡.根據磁鏈觀測器結構,采用開環轉速估計器,并做相應的抗噪聲處理,使它結構簡單,能滿足動態和穩態要求.
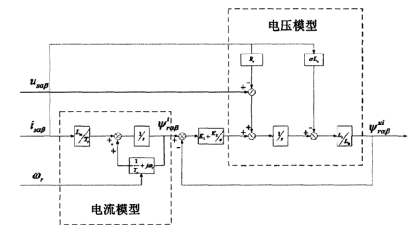
圖1 混合模型磁鏈觀測器控制框圖
三、模型搭建及仿真分析
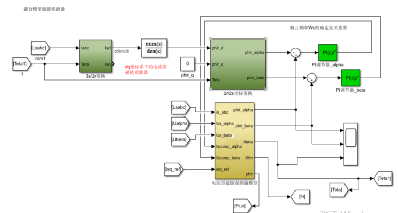
圖2速度估計模塊(混合模型磁鏈觀測器法)
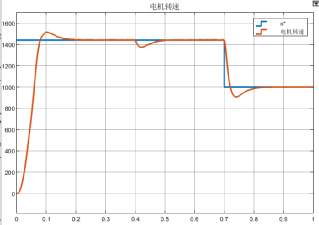
圖3速度估計跟蹤波形變化情況
從圖3可以發現,速度估計的波形在突加載和速度變化的時候都能很好的跟蹤上給定值,證明該估計方法的可行性和有效性。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2562文章
52504瀏覽量
763279 -
電機
+關注
關注
143文章
9243瀏覽量
148255 -
異步電機
+關注
關注
6文章
428瀏覽量
33236 -
觀測器
+關注
關注
0文章
49瀏覽量
10322 -
矢量控制
+關注
關注
2文章
289瀏覽量
32653
原文標題:異步電機速度估計-混合模型磁鏈觀測器法
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
異步電機無感控制中,觀測器在觀測磁鏈時需要用到轉速信息,而在速度估計時有需要用到磁鏈的信息,這樣不矛盾嗎?
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機驅動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd如圖,異步電機無速度傳感
發表于 05-21 09:48
基于電壓型磁鏈觀測器的異步電機矢量控制學習
導讀:本期主要介紹電壓型磁鏈觀測器(voltage flux observer)在靜止坐標系下的表現形式,應用在異步電機矢量控制系統中。
異步電機控制筆記
控制,對異步電機在轉子磁場定向下的狀態方程模型進行了推導,并基于狀態方程模型討論了三閉環控制算法的實現,以及MTPA與MTPV的實現方法。然后對開環的磁
發表于 03-29 11:40
?9次下載

基于電壓型磁鏈觀測器的異步電機矢量控制學習
本期主要介紹電壓型磁鏈觀測器(voltageflux observer)在靜止坐標系下的表現形式,應用在異步電機矢量控制系統中。
磁
發表于 03-30 10:20
?1次下載
基于電流型磁鏈觀測器的異步電機矢量控制學習
本期主要介紹電流型磁鏈觀測器(current flux observer)在不同坐標系下的表現形式,應用在異步電機矢量控制系統中。
磁
發表于 03-30 09:59
?1次下載





 工商網監
工商網監
評論