") 異步電機的改進型電壓模型磁鏈觀測器介紹
異步電機的改進型電壓模型磁鏈觀測器介紹
導(dǎo)讀:本期文章主要介紹異步電機的改進型電壓模型磁鏈觀測器。傳統(tǒng)純積分形式的積分器在低速區(qū)域存在初始值問題和直流偏置問題,所以在實際應(yīng)用中必須對電壓模型進行改進。本期文章中的對電壓模型改進是借鑒一篇IEEE中的方法。
一、電壓模型磁鏈觀測器介紹
1.1 公式實現(xiàn)(靜止坐標系)
從上式可以看出,純積分形式的電壓模型具備以下幾個特點:
(1)該模型與轉(zhuǎn)子電阻無關(guān),且不需要電機轉(zhuǎn)速 信息,適合用于無速度傳感器矢量控制;
(2)包含一純積分項,被積項的初始相位與直流偏置都會影響積分結(jié)果;
(3)低速時觀測器性能較差。因為低速時給定的定子電壓幅值小,電機端電壓難以精確獲得,定子電阻的阻值在運行過程中又會發(fā)生變化,使得被積項產(chǎn)生明顯的相對誤差。
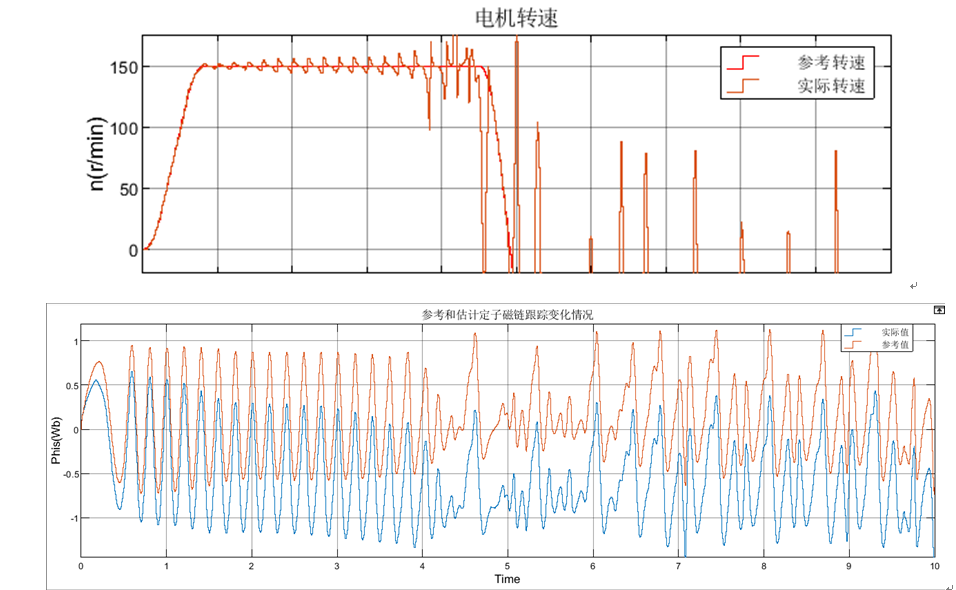
圖1-1 純積分形式電壓模型觀測情況(±150r/min)
從圖(1-1)可以發(fā)現(xiàn),利用存積分形式的電壓模型在低速時的觀測值發(fā)散不收斂,造成系統(tǒng)失去穩(wěn)定。
二、改進的電壓模型磁鏈觀測器介紹
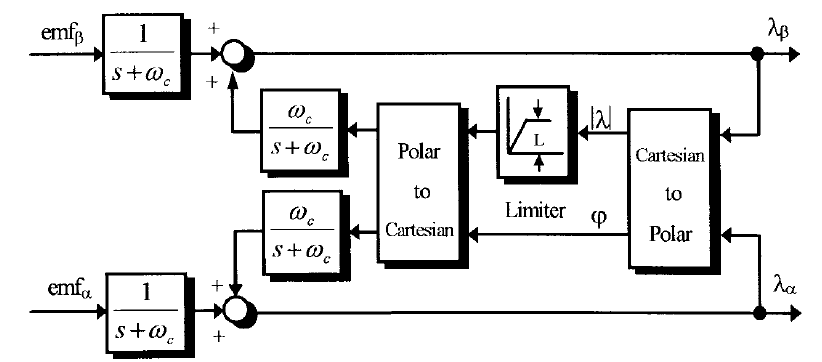
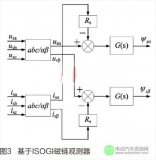
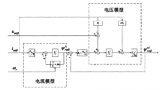
圖2-1 改進的電壓模型磁鏈觀測器控制框圖
改進的方法思路:用低通濾波環(huán)節(jié)替換純積分環(huán)節(jié),然后進行坐標變換,對估計磁鏈的幅值進行限幅再經(jīng)過LPF濾波后坐標變換與首次的濾波值相加。
在高速區(qū)域,補償環(huán)節(jié)的補償量接近0;在低速區(qū)域,因為反饋補償,可以改善直流偏置的問題。
三、仿真波形分析(改進型電壓模型磁鏈觀測器)
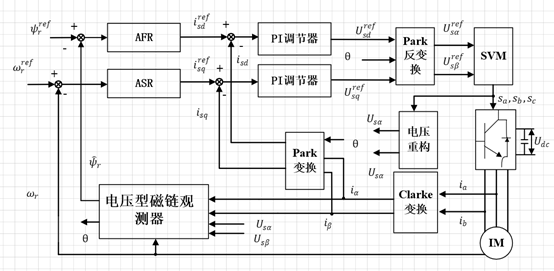
圖3-1 基于電壓型磁鏈觀測器的異步電機矢量控制框圖
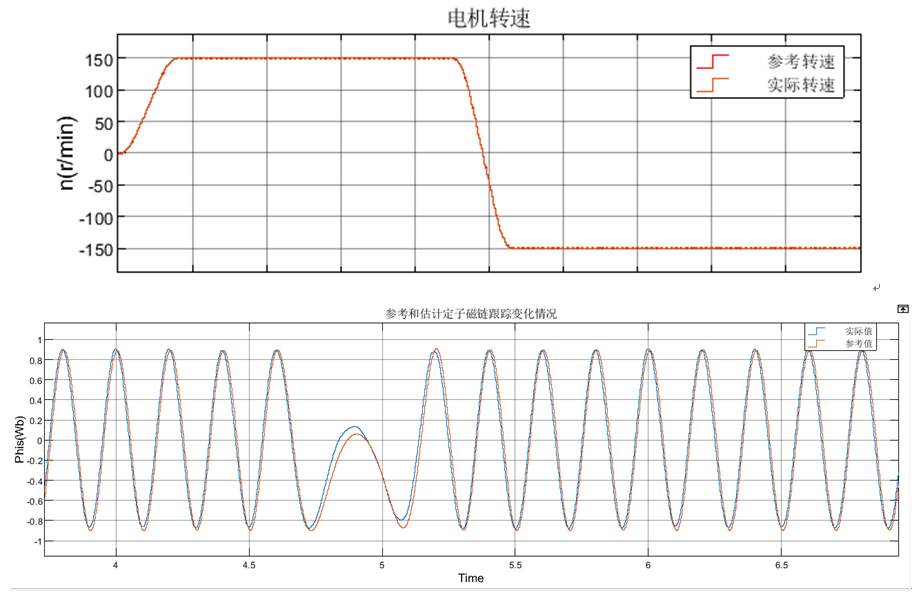
圖3-2 改進型電壓模型觀測情況(±150r/min)
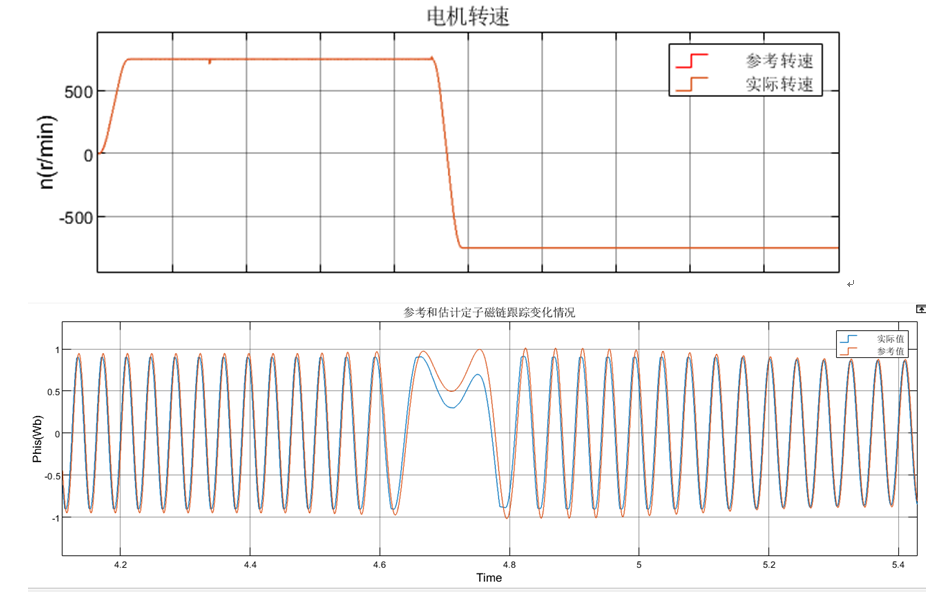
圖3-3 改進型電壓模型觀測情況(±750r/min)
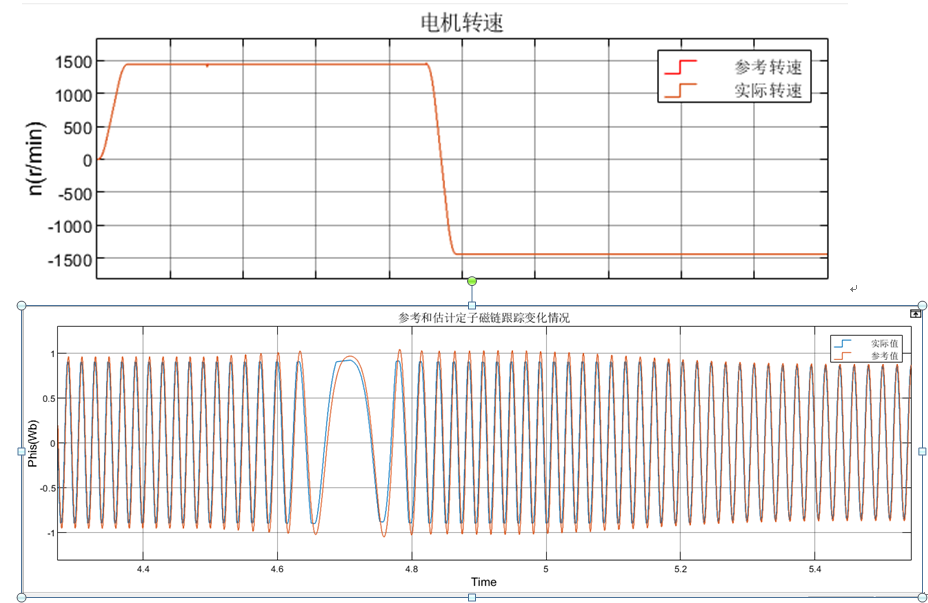
圖3-4 改進型電壓模型觀測情況(±1500r/min)
從圖(3-2)可以看出,改進型的電壓模型的觀測幅值很好地跟蹤上參考值,但還是存在相位誤差。相比較純積分型,改進的電壓模型在低速時首先能保證控制系統(tǒng)的穩(wěn)定且觀測值能跟蹤上參考值,說明該改進方法的可行性和有效性。
四、總結(jié)
改進方法只是對觀測幅值進行處理補償,并未涉及對相位誤差進行處理。后期文章會介紹其它改進方法,包括對觀測幅值和相位誤差的補償處理。
審核編輯:湯梓紅
-
仿真
+關(guān)注
關(guān)注
51文章
4229瀏覽量
135229 -
異步電機
+關(guān)注
關(guān)注
6文章
428瀏覽量
33226 -
模型
+關(guān)注
關(guān)注
1文章
3477瀏覽量
49922 -
觀測器
+關(guān)注
關(guān)注
0文章
49瀏覽量
10322
原文標題:異步電機IM-改進的電壓模型磁鏈觀測器學(xué)習(xí)
文章出處:【微信號:淺談電機控制,微信公眾號:淺談電機控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
異步電機混合模型轉(zhuǎn)子磁鏈觀測器學(xué)習(xí)
基于二階廣義積分器的永磁同步電機定子磁鏈觀測方法
異步電機無感控制中,觀測器在觀測磁鏈時需要用到轉(zhuǎn)速信息,而在速度估計時有需要用到磁鏈的信息,這樣不矛盾嗎?
基于二階廣義積分器的永磁同步電機定子磁鏈觀測方法介紹
全階模型磁鏈觀測器學(xué)習(xí)
基于電壓型磁鏈觀測器的異步電機矢量控制學(xué)習(xí)
異步電機模型預(yù)測電流控制(MPCC)

異步電機控制筆記
基于電壓型磁鏈觀測器的異步電機矢量控制學(xué)習(xí)
基于電流型磁鏈觀測器的異步電機矢量控制學(xué)習(xí)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論