") 介紹一種移動(dòng)寬帶57 GHz - 64 GHz FMCW雷達(dá)傳感器系統(tǒng)
介紹一種移動(dòng)寬帶57 GHz - 64 GHz FMCW雷達(dá)傳感器系統(tǒng)

1、概述
本文介紹了一種移動(dòng)寬帶57 GHz - 64 GHz FMCW雷達(dá)傳感器系統(tǒng),旨在通過(guò)探測(cè)飛行中的射彈來(lái)提高執(zhí)行和平或維和任務(wù)的士兵的態(tài)勢(shì)感知能力。為了獲得方位視場(chǎng)的瞬時(shí)覆蓋,使用了頻率掃描蜿蜒天線。因此,傳感器被配置為采用掃描原理,通過(guò)將不同頻率的寬帶波形輻射到不同的空間方向。 2、簡(jiǎn)介
對(duì)于處于火力下的士兵來(lái)說(shuō),由于馬赫錐的傳播沖擊波,不可能從聲學(xué)上確定發(fā)射的明確來(lái)源。特別是在城市地形中,這個(gè)問(wèn)題通過(guò)多路徑傳播進(jìn)一步加劇。人口趨勢(shì)表明,城市化進(jìn)程日益加快,這使得未來(lái)所有軍事行動(dòng)都可能涉及城市層面。建立和平和維持和平行動(dòng)期間的恐怖主義威脅和不對(duì)稱戰(zhàn)爭(zhēng)表明,鑒于特別是狙擊手構(gòu)成的威脅,必須確保部署的部隊(duì)具有自我保護(hù)和生存的能力。目前存在各種使用不同物理效果的狙擊手探測(cè)系統(tǒng)。聲學(xué)和光電解決方案往往是商用的,但它們的操作能力可能會(huì)受到高水平的后輪噪聲、多徑傳播、灰塵、煙霧和霧氣的限制。毫米波 (mmW) 雷達(dá)傳感器提供小巧輕便的選擇,可作為獨(dú)立設(shè)備或多傳感器套件的一部分。雷達(dá)被證明適用于此連接,因?yàn)樗哂腥旌蚰芰Γ┩富覊m和煙霧的能力,以及獨(dú)特的警報(bào)閾值和低錯(cuò)誤率。
3、系統(tǒng)概念
A. RCS研究
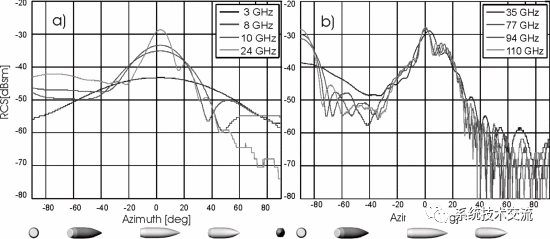
該概念研究解決了與雷達(dá)性能以及距離相關(guān)的探測(cè)概率和定位概率有關(guān)的問(wèn)題。首先,確定彈丸的頻率相關(guān)RCS作為彈丸縱橫角的函數(shù),用于各種頻率范圍。
B. FMCW-雷達(dá)設(shè)計(jì)
使用 FMCW 技術(shù)可提供高平均功率、良好的速度(多普勒頻移)和距離分辨率。所需的雷達(dá)設(shè)計(jì)需要良好的測(cè)量精度、高更新率,以及在惡劣的雷達(dá)環(huán)境中檢測(cè)非常低的雷達(dá)橫截面(RCS)物體,例如來(lái)自近處和遠(yuǎn)處建筑物、移動(dòng)車(chē)輛或人員的高雜波水平的農(nóng)村地區(qū)。
C. 蜿蜒線天線
在掃描雷達(dá)進(jìn)近的情況下,由于相對(duì)于彈丸速度的旋轉(zhuǎn)速度較低,因此不可能使用機(jī)械轉(zhuǎn)向天線。另一種選擇是使用電動(dòng)控制雷達(dá)波束,但在大多數(shù)情況下,由于必要的移相器和配電網(wǎng)絡(luò),傳統(tǒng)的陣列饋電天線非常復(fù)雜、龐大且昂貴,并且限制了移動(dòng)使用。使用基板集成波導(dǎo)(SIW)“漏波天線”允許通過(guò)簡(jiǎn)單的頻移來(lái)控制主瓣,并導(dǎo)致陣列尺寸的顯著減小。
D. 演示器的實(shí)現(xiàn)和首次測(cè)試
已經(jīng)建立了一個(gè)移動(dòng)(低成本)演示器(用于概念驗(yàn)證,并且出于演示目的,該系統(tǒng)基本上是用一個(gè)小角反射器(-9 dBsm)作為人類(lèi)攜帶的地面移動(dòng)目標(biāo)的示例進(jìn)行測(cè)試的。
4、結(jié)果分析
雷達(dá)系統(tǒng)可以可靠地用于檢測(cè)某個(gè)區(qū)域的射彈,但它不是手持式解決方案。MMIC(單片微波集成電路)技術(shù)的最新進(jìn)展可以進(jìn)一步實(shí)現(xiàn)所有基本組件的小型化,用于狙擊手檢測(cè)目的的基于便攜式毫米波的雷達(dá)傳感器解決方案。這樣的系統(tǒng)可以允許從單個(gè)站點(diǎn)或士兵進(jìn)行精確的軌道重建,誤報(bào)率可以忽略不計(jì)。因此,我們未來(lái)的工作重點(diǎn)是FMCW雷達(dá)作為便攜式系統(tǒng)的小型化,涉及天線設(shè)計(jì),尺寸和低功耗。
A. RCS研究
首先進(jìn)行了分析,以確定雷達(dá)解決方案對(duì)狙擊手探測(cè)和定位問(wèn)題的可行性。使用CADRCS 模擬了各種射彈的頻率取決于RCS和毫米W域中各個(gè)方面的多個(gè)頻率,這也通過(guò)在電波暗室中良好控制的條件下進(jìn)行測(cè)量來(lái)驗(yàn)證。
圖2是給定偏振下所得RCS值與縱橫角的函數(shù)關(guān)系圖。使用已知的射彈RCS計(jì)算取決于檢測(cè)概率的范圍。
B. 60 GHz調(diào)頻連續(xù)波雷達(dá)的概念和實(shí)現(xiàn)
該應(yīng)用需要非常短的最大范圍,可達(dá) 25 m。因此,工作頻率可達(dá)W波段是可能的選擇。但是,如上所述,雷達(dá)傳感器系統(tǒng)以60 GHz的中心頻率工作。盡管在工作頻率處有很強(qiáng)的大氣吸收線,但短距離的探測(cè)可能性也足夠高,可以記錄良好的結(jié)果。可能的用途之一是探測(cè)子彈或單兵攜帶防空系統(tǒng)(肩扛導(dǎo)彈)。特別是對(duì)于小口徑武器,靈敏度成為此類(lèi)應(yīng)用中的主要問(wèn)題,估計(jì)目標(biāo)速度高達(dá)1000 m / s。因此,V波段內(nèi)的工作頻率是對(duì)象RCS(圖1)、系統(tǒng)靈敏度和盡可能低的系統(tǒng)價(jià)格之間的最佳折衷方案。
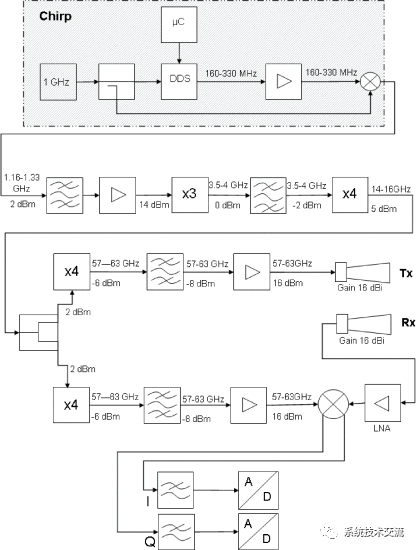
硬件概念基于寬帶57 GHz-63 GHz FMCW前端,如圖2框圖所示。頻率范圍為14 GHz至16 GHz的RF處理級(jí)的LO由特殊的倍頻器和濾波器級(jí)提供。在此之后,通過(guò)功率分配器在后續(xù)階段對(duì)傳輸和接收分支的信號(hào)進(jìn)行劃分。應(yīng)用的波形是一系列三角形斜坡,掃描時(shí)間為 $tau=500mu mathrm{s}$。
發(fā)射/接收鏈中的后續(xù)鏈路是有源倍頻器,它是頻率轉(zhuǎn)換的低成本替代方案。該元件的非線性傳遞函數(shù)不可避免地以諧波的形式引起信號(hào)失真。通過(guò)濾波(高通),選擇第四次諧波(對(duì)應(yīng)于57 GHz至63 GHz所需范圍的唯一泛音),并通過(guò)發(fā)射天線放大和輻射。發(fā)射的信號(hào)在接收分支中放大,與用作本振的輻射同步。在第一個(gè)接收步驟中,由吊具反射回來(lái)的信號(hào)由低噪聲放大器(LNA)放大,噪聲系數(shù)為4 dB。通過(guò)I/Q解調(diào)器,將前置放大信號(hào)與發(fā)射信號(hào)混合到基帶,以便實(shí)現(xiàn)數(shù)字采樣。使用同相和正交方法允許在保留相位信息的情況下解調(diào)高頻信號(hào)。相位信息的評(píng)估是確定彈丸的速度(多普勒)或飛行方向(“單脈沖”)的先決條件。這種方法的另一個(gè)優(yōu)點(diǎn)是,采樣信號(hào)以復(fù)雜的形式直接收集。因此,使用數(shù)字信號(hào)處理更加靈活和高效。
此外,該傳感器包含完整的傳感器處理鏈,能夠獨(dú)立運(yùn)行,并將跟蹤的對(duì)象數(shù)據(jù)(范圍、速度、方向)傳送到人機(jī)界面(HMI)。I/Q 通道以 15 位和 75 MS/s 的速度數(shù)字化。直接數(shù)字頻率合成(DDS)產(chǎn)生三角波形斜坡(線性調(diào)頻)和模擬數(shù)字采樣單元的觸發(fā)器。
時(shí)域數(shù)據(jù)使用快速傅里葉變換(FFT)算法映射到頻域。如果窗口寬度$ au_{mathrm{o}}$ 小于 $tau/2$ ($ au$:掃描時(shí)間),并且窗口與頻率掃描同步,則頻域中的頻譜分辨率由時(shí)域窗口函數(shù)確定。時(shí)域窗口寬度是執(zhí)行FFT算法的時(shí)域信號(hào)序列的長(zhǎng)度。窗口化函數(shù)是應(yīng)用于時(shí)域輸入信號(hào)鏈的加權(quán)函數(shù)。
在此典型的信號(hào)處理步驟之后,使用小波變換或短時(shí)傅里葉變換(SFT)使用高斯窗口將掃描概念的角度分辨率與目標(biāo)范圍相結(jié)合,進(jìn)行時(shí)間-頻率分析。在計(jì)算二維快速傅里葉變換后,該變換用于計(jì)算一系列距離多普勒矩陣以分離固定目標(biāo)。基于FFT的方法適用于平穩(wěn)隨機(jī)過(guò)程。頻率分辨率取決于數(shù)據(jù)的長(zhǎng)度、采樣率和所使用的數(shù)據(jù)窗口。對(duì)于飛行的彈丸,其雷達(dá)反射波形是非靜止的。因此,當(dāng)通過(guò)FFT分析時(shí),相位相干數(shù)據(jù)集的長(zhǎng)度是有限的。對(duì)于快速移動(dòng)的目標(biāo),還必須考慮多普勒頻移并進(jìn)行校正。這種設(shè)置保證了最佳頻率和目標(biāo)位置分辨率。
C. 蜿蜒線天線設(shè)計(jì)
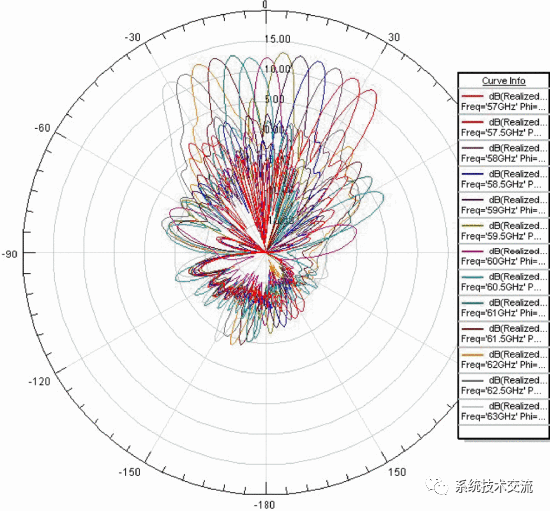
蜿蜒的天線沿水平天線軸線配備了許多等距但空間分離的槽(圖 4)。由于輻射電磁波的建設(shè)性和破壞性干擾,形成了整體輻射方向圖,如果所有插槽在60 GHz的中心頻率“同相”退出,則將獲得最大輻射,而輻射角度是相鄰插槽之間相位關(guān)系的函數(shù)。如果工作頻率從中心頻率增加或減少,則槽內(nèi)/減小與聚焦波束位置之間的相位差也會(huì)從中心位置(正交,相對(duì)于天線平面)變?yōu)槿我庵付ń嵌取H鐖D5所示,這種類(lèi)型的天線只需改變饋電頻率(啁啾),就可以實(shí)現(xiàn)高度定向的波束位置。輻射的波束寬度在6°(?3dB)處保持恒定,因?yàn)橥ㄟ^(guò)改變頻率掃描光束。使用6 GHz的絕對(duì)帶寬,可以使用~450 MHz的相對(duì)帶寬進(jìn)行距離估計(jì)(距離分辨率~33cm)。此外,孔徑分布很容易受到錐形的影響,以控制(低)旁瓣電平或光束形狀。
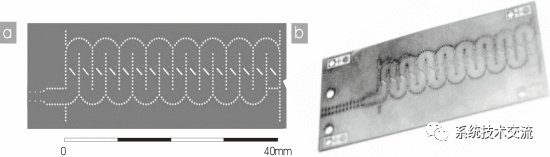
對(duì)于主環(huán)路相對(duì)于天線平面的正交方向,兩個(gè)相鄰槽的相位距離應(yīng)該是中心頻率$lambda/2$自由波長(zhǎng)的一半。掃描范圍可以通過(guò)兩個(gè)相鄰槽之間的相位差的變化來(lái)增強(qiáng)。由于蜿蜒的形狀布局,偏振平面從一個(gè)槽到另一個(gè)槽傾斜180°。因此,需要對(duì)相鄰槽進(jìn)行反相位饋電,以獲得具有最大輻射能量的建設(shè)性干涉圖樣。
與作為諧振結(jié)構(gòu)的漏波天線概念相比,蜿蜒線天線不匹配以避免內(nèi)部反射。如果每個(gè)槽的電阻與槽總數(shù)和波導(dǎo)阻抗的乘積完全對(duì)應(yīng),則整個(gè)能量應(yīng)通過(guò)槽發(fā)射。理論計(jì)算和驗(yàn)證是使用開(kāi)槽介電填充波導(dǎo)的有限元模型完成的。
D. 系統(tǒng)驗(yàn)證
第一次測(cè)試是在距離雷達(dá)系統(tǒng)不遠(yuǎn)的地方使用小型(RCS:?8dBsm)移動(dòng)角反射器進(jìn)行的。
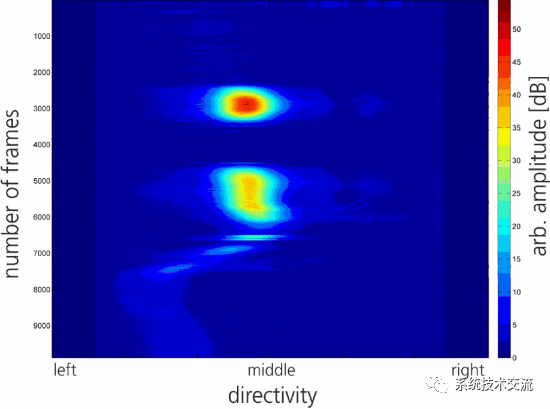
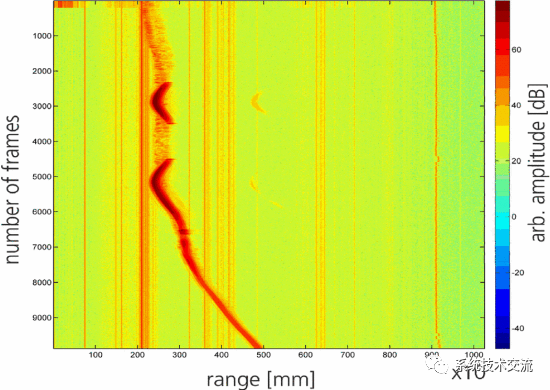
在時(shí)域數(shù)據(jù)中,目標(biāo)位置由已知饋電頻率/時(shí)間的蜿蜒線天線的方向性給出(在圖 6 中以左、中、右視鏡觀察提及)。在天線視場(chǎng)的正中間可以觀察到強(qiáng)烈的兩次閃爍反射。將 30 秒數(shù)據(jù)集的頻域計(jì)算為距離門(mén)。在距離傳感器約5 m的距離內(nèi)可以觀察到強(qiáng)烈的反射,如圖7所示。
為了簡(jiǎn)化處理后雷達(dá)特征的可視化,首先將數(shù)據(jù)繪制在笛卡爾坐標(biāo)中,以給出時(shí)頻范圍依賴性的印象。時(shí)頻分析通過(guò)小波變換或短時(shí)傅里葉變換(SFT)完成,具體取決于所需結(jié)果的質(zhì)量。
對(duì)快速移動(dòng)的物體進(jìn)行了第一次真正的現(xiàn)場(chǎng)測(cè)試,通過(guò)使用從5.56毫米到12.7毫米(cal.50)的不同口徑的多種武器來(lái)改變射彈的大小。
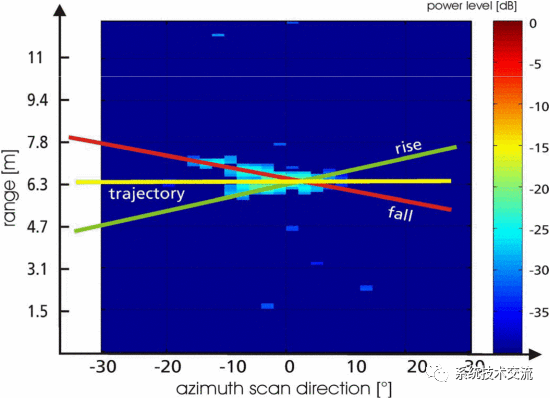
時(shí)頻分析后的時(shí)域和頻域組合圖,帶有估計(jì)軌跡的 DRAGUNOW 7.62 毫米彈丸的 V 形彈丸特征(黃條)。其他檢測(cè)起源于噪聲或雜散。(笛卡爾坐標(biāo)系中的繪圖)。特征由兩個(gè)部分組成:下降 - 正多普勒頻移,上升 - 負(fù)多普勒頻移,來(lái)自用于頻率斜坡(線性調(diào)頻)的三角波形的上下啁啾。利用間斷頻率(IF)±多普勒頻移和特征角偏差(上升和下降)的差異,可以估計(jì)軌跡,并將徑向速度分量計(jì)算成彈丸的實(shí)際速度約為570 m/s±40 m/s。
在移動(dòng)物體的情況下,彈丸通過(guò)期間的徑向速度導(dǎo)致虛擬加速度,因此實(shí)際速度的計(jì)算在很大程度上取決于時(shí)間取決于檢測(cè)角度。在幾個(gè)多普勒細(xì)胞上進(jìn)行相干積分是必要的,因?yàn)槟繕?biāo)特征分布在相鄰的多普勒細(xì)胞或不同的范圍箱上。這種積分時(shí)間受到限制,因?yàn)轭l率掃描引起的光束方向的快速變化限制了光束內(nèi)的彈丸觀察時(shí)間。
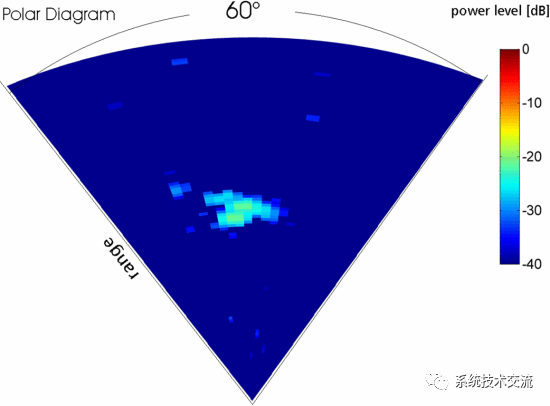
為了完成測(cè)量結(jié)果的呈現(xiàn),將彈丸的雷達(dá)特征繪制在極坐標(biāo)圖中,該極圖可以通過(guò)使用內(nèi)部電子羅盤(pán)和全球定位系統(tǒng)(GPS)輕松地在地理參考數(shù)據(jù)中轉(zhuǎn)換。
6、總結(jié)
通過(guò)不斷開(kāi)發(fā)用于彈丸探測(cè)的雷達(dá)系統(tǒng),已經(jīng)使用頻率掃描天線和低成本硬件組件等最先進(jìn)的技術(shù),設(shè)置并演示了中心頻率為60 GHz的FMCW寬帶雷達(dá)演示器。結(jié)果表明,所選擇的方法非常適合實(shí)時(shí)檢測(cè)具有非常低RCS的慢速和非常快速移動(dòng)的物體。為了實(shí)現(xiàn)物體周?chē)娜驒z測(cè)區(qū)域,需要多個(gè)雷達(dá)傳感器,或者必須開(kāi)發(fā)擴(kuò)展的蜿蜒線天線概念以獲得>60°的掃描角度。因此,將來(lái)必須研究和比較不同的實(shí)現(xiàn)概念。由于雷達(dá)的探測(cè)范圍有限,在操作條件下,通過(guò)與其他類(lèi)型的傳感器(例如聲學(xué)或光電傳感器)進(jìn)行傳感器融合,將獲得最佳結(jié)果。
審核編輯:劉清
-
FMCW
+關(guān)注
關(guān)注
9文章
95瀏覽量
23866 -
雷達(dá)系統(tǒng)
+關(guān)注
關(guān)注
6文章
258瀏覽量
29107 -
RCS
+關(guān)注
關(guān)注
0文章
57瀏覽量
12985 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
294瀏覽量
34915
原文標(biāo)題:用于檢測(cè)快速移動(dòng)物體的掃描FMCW雷達(dá)系統(tǒng)
文章出處:【微信號(hào):CloudBrain-TT,微信公眾號(hào):云腦智庫(kù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
TEF810X 76 GHz至81GHz車(chē)載雷達(dá)收發(fā)器技術(shù)手冊(cè)
IWR6243單芯片57至64 GHz FMCW收發(fā)器數(shù)據(jù)表

AWR1642單芯片77GHz和79GHz FMCW雷達(dá)傳感器數(shù)據(jù)表
AWRL6432單芯片57GHz至64GHz汽車(chē)雷達(dá)傳感器數(shù)據(jù)表
IWR1843AOP單芯片77GHz和79GHz FMCW毫米波傳感器天線封裝(AOP)數(shù)據(jù)表
IWRL6432單芯片57GHz至64GHz工業(yè)雷達(dá)傳感器數(shù)據(jù)表
AWR1843AOP單芯片77GHz和79GHz FMCW毫米波傳感器天線封裝(AOP)數(shù)據(jù)表
IWRL1432單芯片76GHz至81GHz工業(yè)雷達(dá)傳感器數(shù)據(jù)表
AWR1443單芯片77GHz和79GHz FMCW雷達(dá)傳感器數(shù)據(jù)表
IWR1843單芯片76GHz至81GHz FMCW毫米波傳感器數(shù)據(jù)表
AWRL1432單芯片76GHz至81GHz汽車(chē)雷達(dá)傳感器數(shù)據(jù)表
AWR1843 單芯片 77GHz 至 79GHz FMCW 雷達(dá)傳感器數(shù)據(jù)表
AWR2943/44 單芯片 76GHz 和 81GHz FMCW 雷達(dá)傳感器數(shù)據(jù)表
IWR6843、IWR6443 單芯片 60GHz 至 64GHz 毫米波傳感器數(shù)據(jù)表
AWR2544單芯片76GHz81GHz FMCW雷達(dá)SoC數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論