") 簡(jiǎn)述1500如何通過(guò)脈沖控制步進(jìn)電機(jī)
簡(jiǎn)述1500如何通過(guò)脈沖控制步進(jìn)電機(jī)
前面學(xué)習(xí)了1200高速脈沖輸出功能的應(yīng)用,那1500如何輸出高速脈沖控制步進(jìn)電機(jī)呢?
1500要輸出高速脈沖可以選擇高速脈沖輸出模塊TM PTO4。
一、新建1500項(xiàng)目,組態(tài)好TM PTO4模塊,模塊屬性設(shè)置如下圖所示:
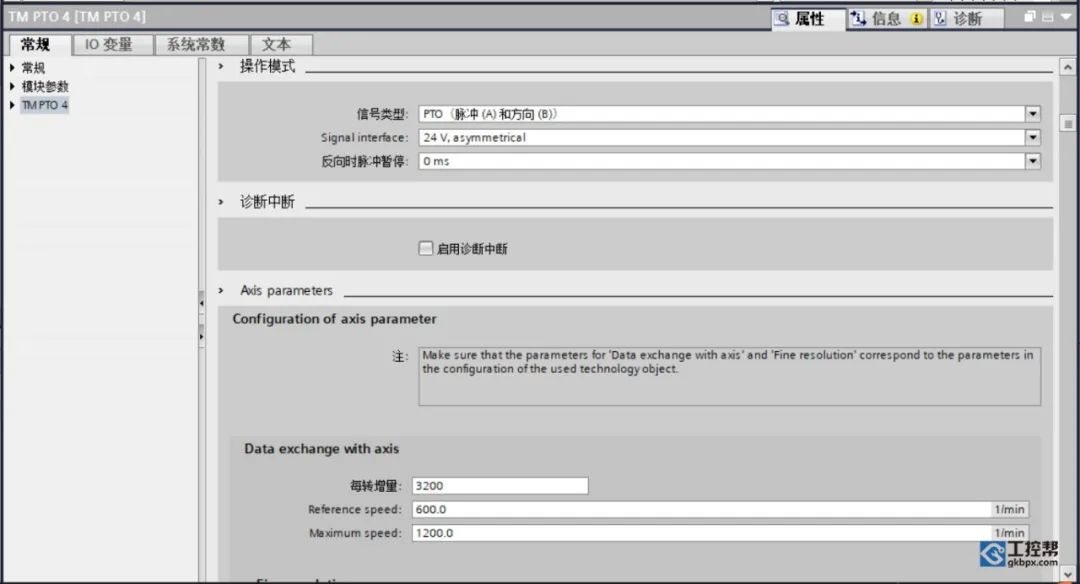
每轉(zhuǎn)增量:步進(jìn)電機(jī)轉(zhuǎn)一圈需要的脈沖數(shù),即細(xì)分。
Reference speed:參考轉(zhuǎn)速,后續(xù)設(shè)置的速度以該速度的百分比表示,范圍-200%至200%。
Maximum speed:最大轉(zhuǎn)速,不得超過(guò)參考轉(zhuǎn)速的2倍。
二、新增定位軸工藝對(duì)象。
在項(xiàng)目樹(shù)中找到工藝對(duì)象>新增對(duì)象,如下圖。
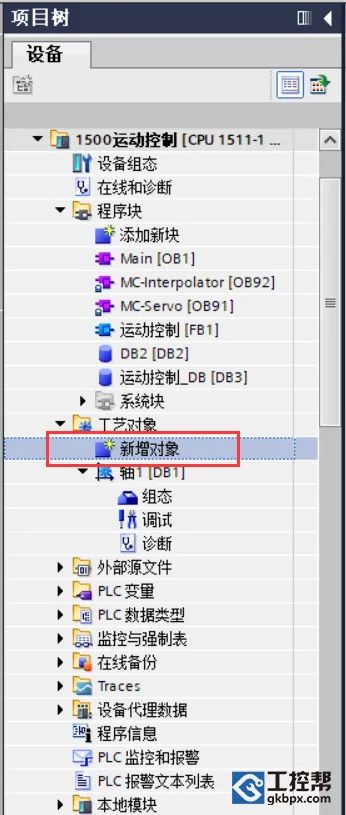
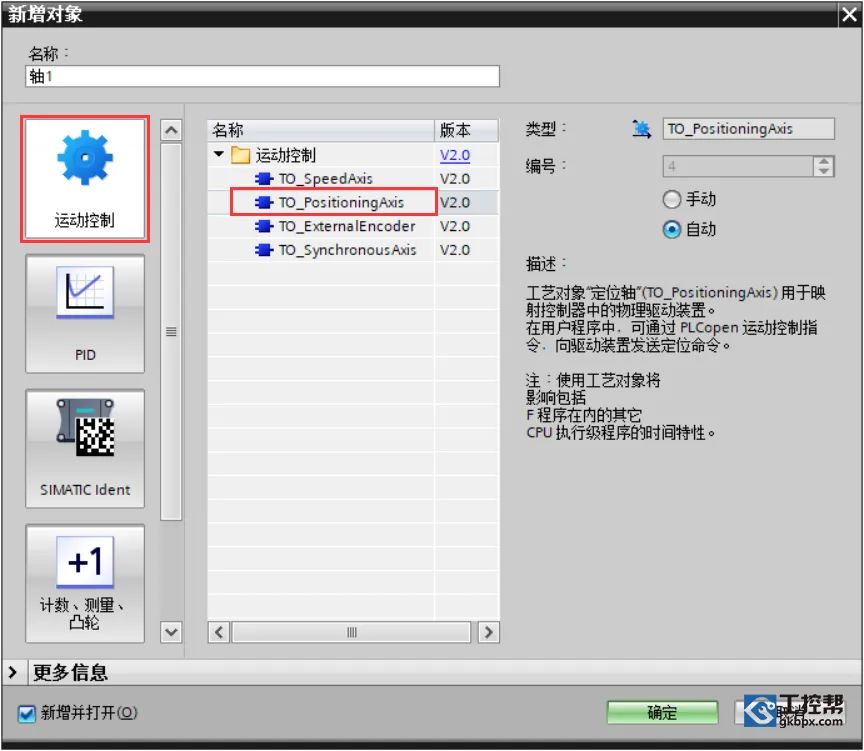
打開(kāi)新增對(duì)象選擇對(duì)話框,點(diǎn)擊>運(yùn)動(dòng)控制>TO_PositioningAxis>確定。
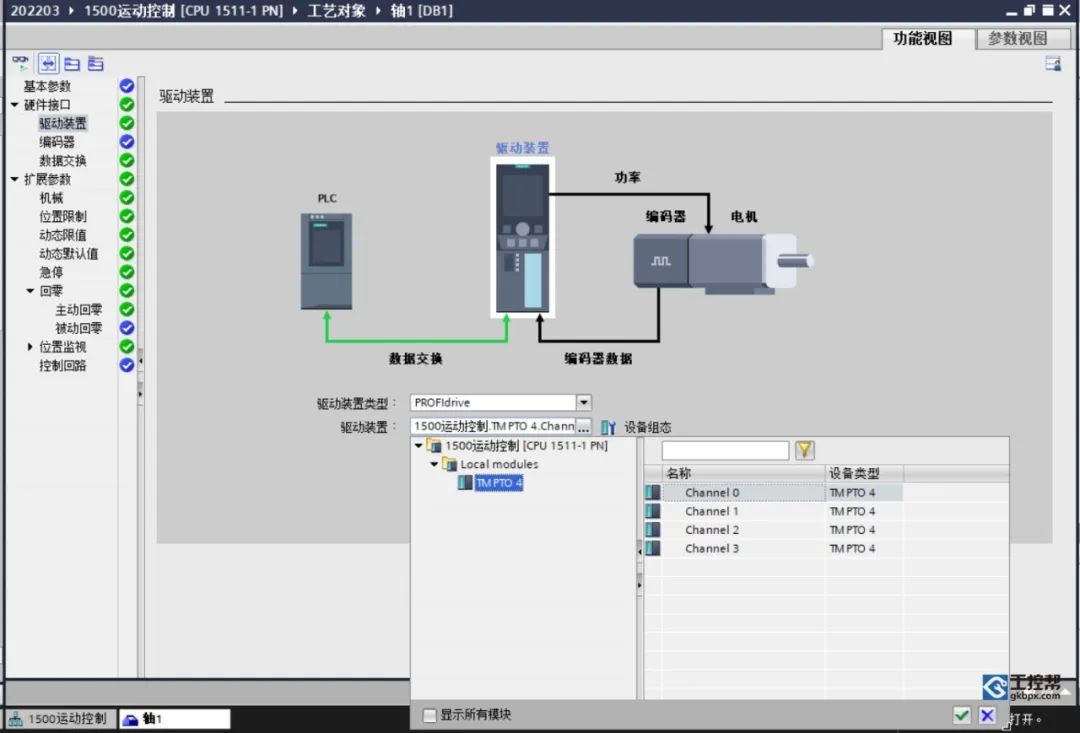
工藝對(duì)象組態(tài)步驟如下:
驅(qū)動(dòng)裝置:驅(qū)動(dòng)裝置設(shè)置為PROFIdrive,選擇組態(tài)的TM PTO4模塊的channel0通道。
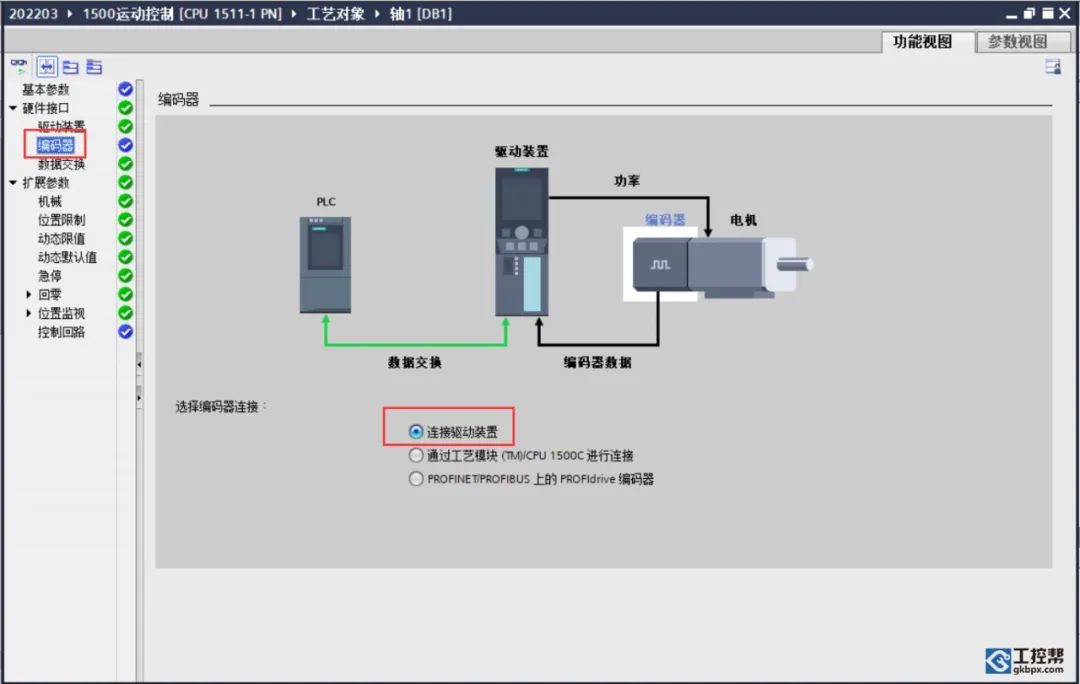
編碼器:步進(jìn)沒(méi)有編碼器,伺服電機(jī)的編碼器也是反饋給驅(qū)動(dòng)器,所以選擇“連接驅(qū)動(dòng)裝置”。
數(shù)據(jù)交換:驅(qū)動(dòng)裝置報(bào)文默認(rèn)選報(bào)文3,參考轉(zhuǎn)數(shù)和最大轉(zhuǎn)數(shù)盡量與模塊屬性設(shè)置一樣,編碼器報(bào)文也選報(bào)文3,增量式編碼器,每轉(zhuǎn)增量設(shè)置成步進(jìn)細(xì)分。高精度設(shè)置成0位(實(shí)為2的0次方)。如果需要將電機(jī)方向反過(guò)來(lái),則需要將驅(qū)動(dòng)裝置和編碼器方向同時(shí)反向。

設(shè)置好負(fù)載齒輪的傳動(dòng)比,絲桿導(dǎo)程參數(shù)。

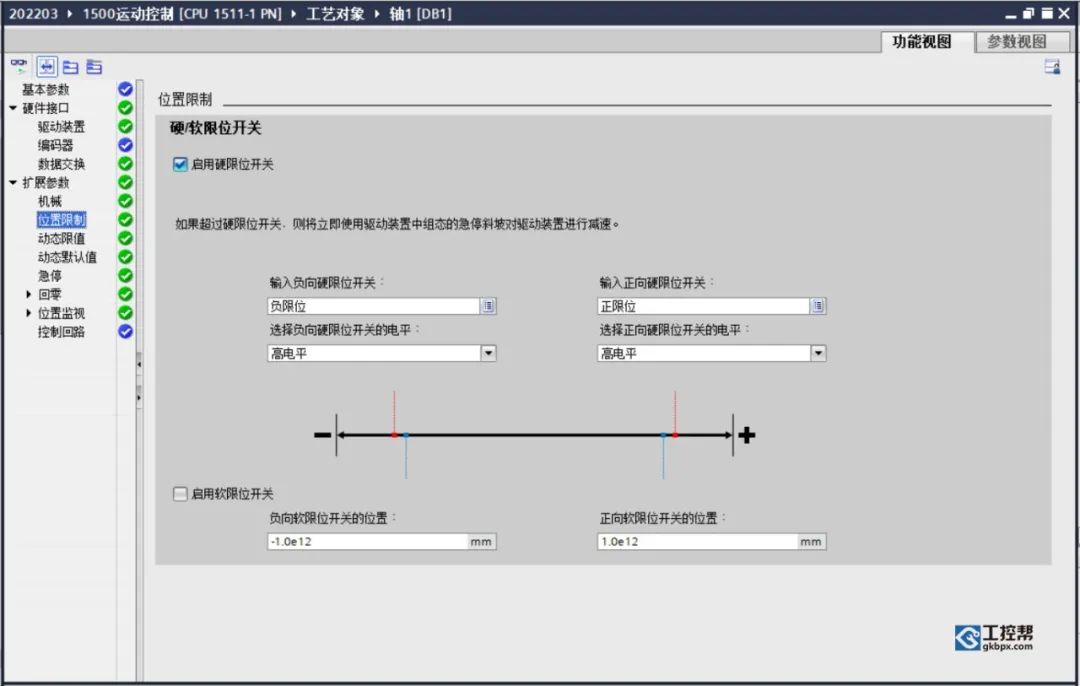
啟用硬限位和軟限位并設(shè)置好對(duì)應(yīng)的信號(hào)輸入及高低電平,注意信號(hào)應(yīng)先定義符號(hào)才可使用。
設(shè)置最大速度,加速時(shí)間和減速時(shí)間,自動(dòng)換算出最大加速度和最大減速度,濾波時(shí)間即加加速度時(shí)間。



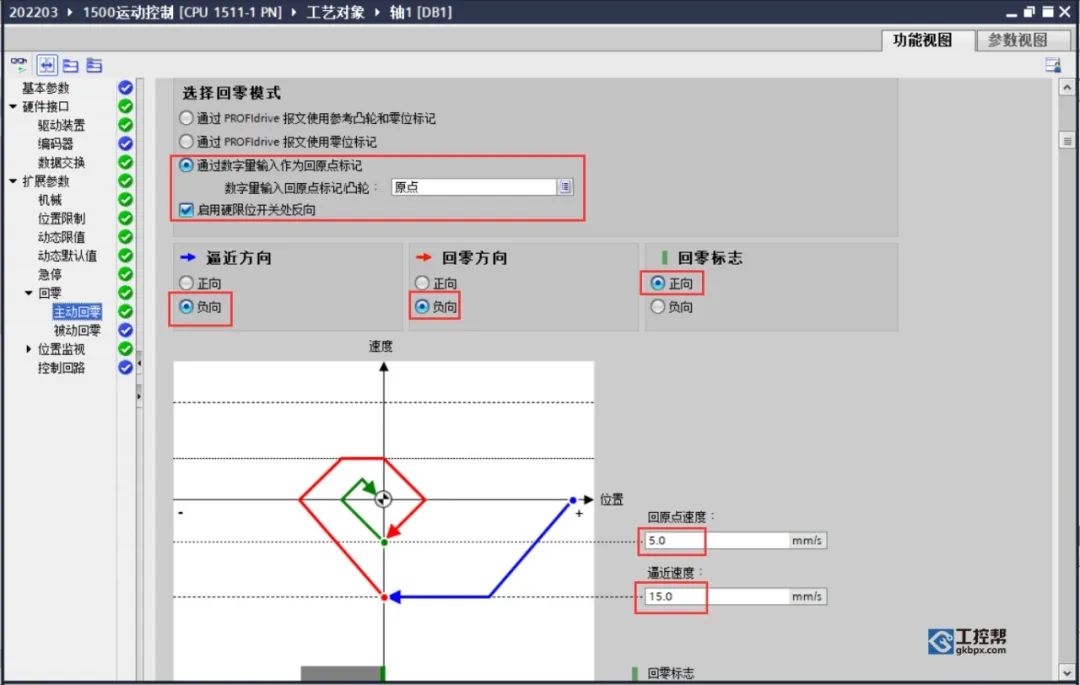
設(shè)置主動(dòng)回原點(diǎn)中原點(diǎn)輸入方式,原點(diǎn)信號(hào),逼近方向,回零方向,回零標(biāo)志,回原點(diǎn)速度,回零速度,啟用硬限位開(kāi)關(guān)處反向。
步進(jìn)沒(méi)有編碼器反饋,去掉啟用跟隨誤差監(jiān)控,否則容易報(bào)故障。

三、編寫程序。
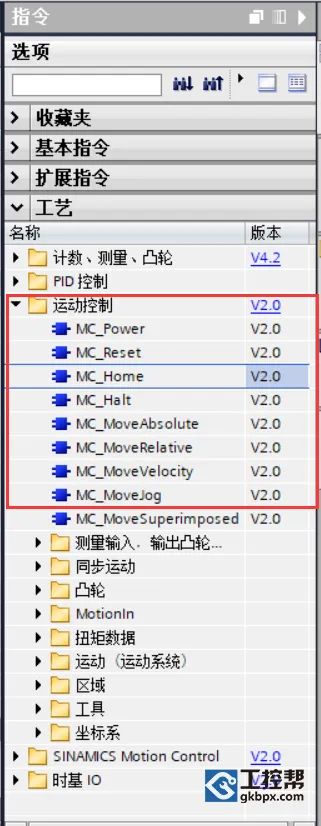
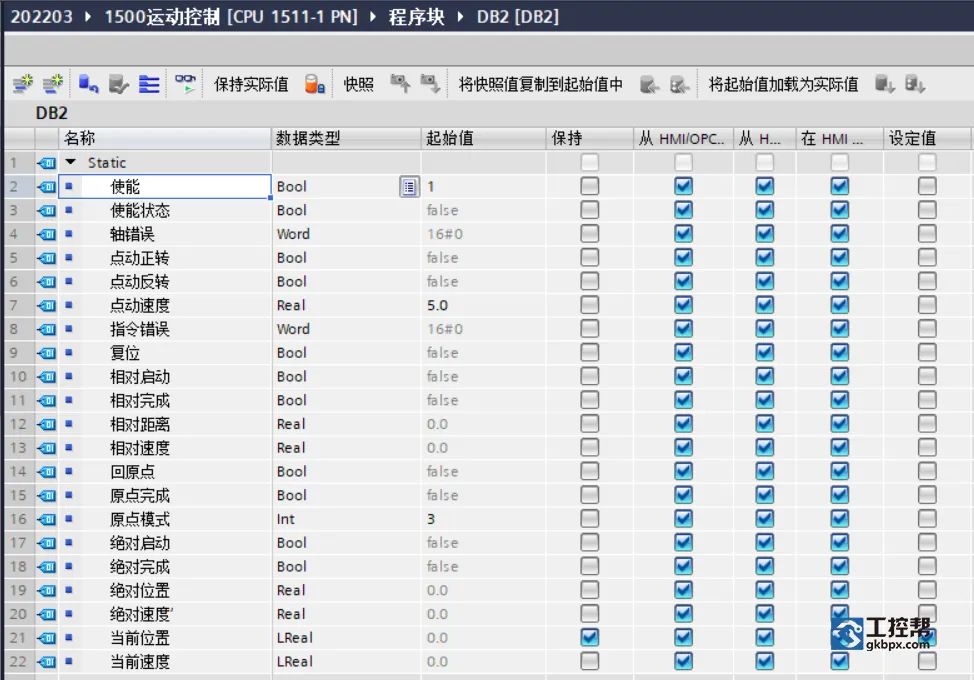
編寫程序方法與1200幾乎相同,在指令列表中找到工藝>運(yùn)動(dòng)控制。此處用SCL語(yǔ)言進(jìn)行編寫,程序如下圖所示。
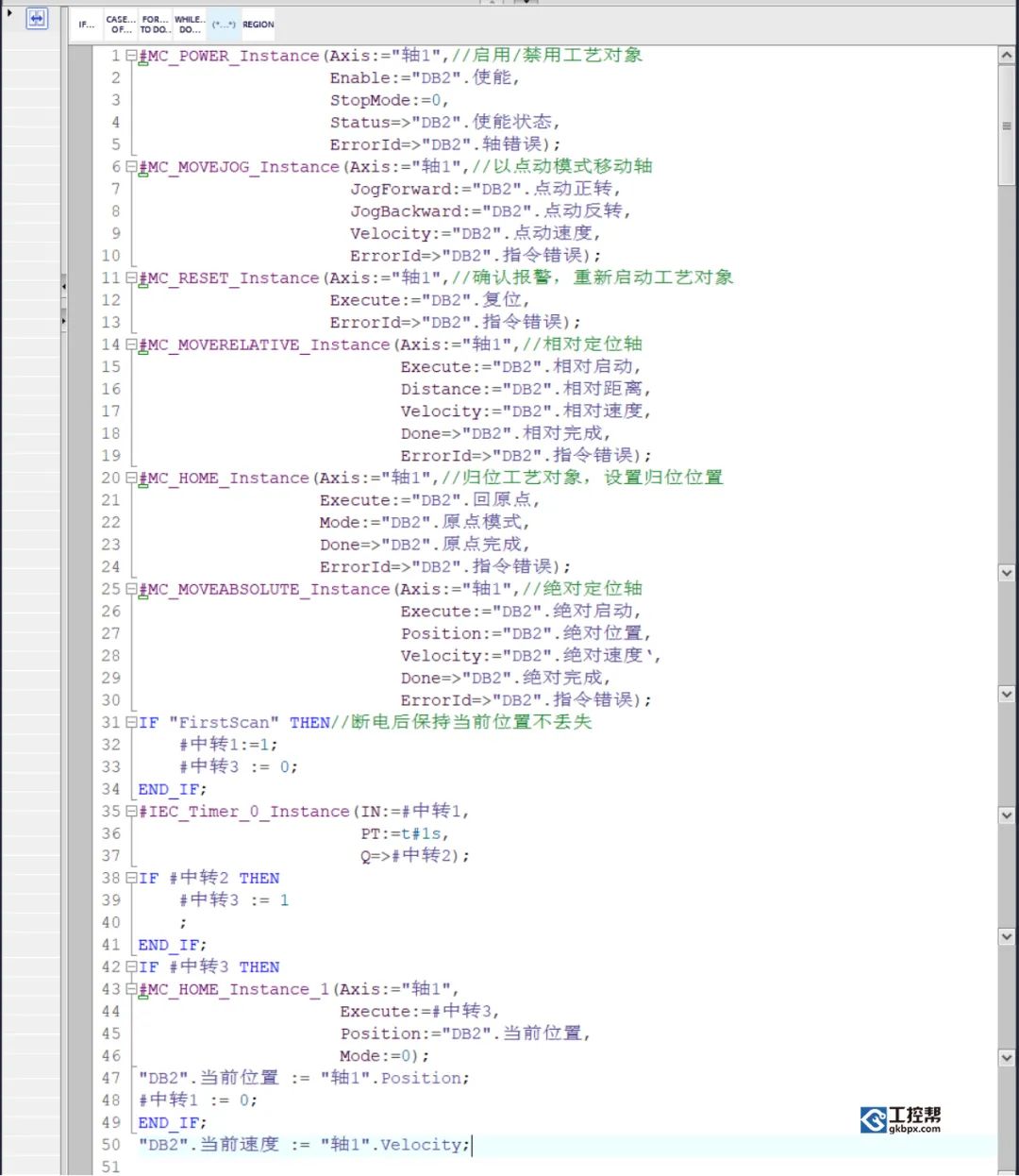
好了,到這來(lái)你已經(jīng)學(xué)會(huì)了1500高速脈沖輸出程序編寫方法,趕緊試試吧。
-
驅(qū)動(dòng)
+關(guān)注
關(guān)注
12文章
1900瀏覽量
86527 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3157瀏覽量
149135 -
高速脈沖
+關(guān)注
關(guān)注
0文章
6瀏覽量
7635
發(fā)布評(píng)論請(qǐng)先 登錄
STM32可以通過(guò)控制脈沖控制步進(jìn)電機(jī)達(dá)到所需的固定轉(zhuǎn)速嗎?
脈沖控制步進(jìn)電機(jī)
海為PLC一路脈沖控制兩臺(tái)步進(jìn)電機(jī)應(yīng)用
步進(jìn)電機(jī)總線控制與脈沖控制的區(qū)別,一文給你詳細(xì)解讀!
步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)及應(yīng)用案例
怎樣控制步進(jìn)電機(jī)快慢_步進(jìn)電機(jī)不用脈沖如何驅(qū)動(dòng)
步進(jìn)電機(jī)與步進(jìn)驅(qū)動(dòng)器控制原理簡(jiǎn)述

51控制步進(jìn)電機(jī)
STM32控制步進(jìn)電機(jī)脈沖定位
通過(guò)PLC實(shí)現(xiàn)步進(jìn)電機(jī)定位控制的方法
步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別
步進(jìn)電機(jī)控制器電路圖 步進(jìn)電機(jī)控制器的分類及其特點(diǎn)

步進(jìn)電機(jī)的控制技術(shù)及發(fā)展概況有哪些?
步進(jìn)電機(jī)轉(zhuǎn)速怎么控制高低
行星減速步進(jìn)電機(jī)與步進(jìn)電機(jī)的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論