") 克服旋轉(zhuǎn)振動(dòng)的CVD系列2相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器
克服旋轉(zhuǎn)振動(dòng)的CVD系列2相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器

克服旋轉(zhuǎn)振動(dòng)的CVD 系列 2 相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器
使用經(jīng)濟(jì)實(shí)惠的先進(jìn)技術(shù)輕松將振動(dòng)降至最低
理想情況下,步進(jìn)電機(jī)應(yīng)在所有速度范圍內(nèi)平穩(wěn)無(wú)振動(dòng)地運(yùn)行。實(shí)際上,它們?cè)诘退佟⒅兴倩蚋咚龠\(yùn)行時(shí)會(huì)產(chǎn)生一些振動(dòng),從而產(chǎn)生不需要的噪音。這種振動(dòng)稱為“旋轉(zhuǎn)振動(dòng)”,開(kāi)發(fā)旋轉(zhuǎn)振動(dòng)抑制系統(tǒng)是一項(xiàng)重大挑戰(zhàn)。為了克服這個(gè)問(wèn)題,通常將步進(jìn)電機(jī)細(xì)分為許多更小的步進(jìn)。然而,以今天的技術(shù),單靠微步進(jìn)是不夠的。并非所有步進(jìn)電機(jī)驅(qū)動(dòng)器或芯片都以相同的方式管理旋轉(zhuǎn)振動(dòng)。本技術(shù)論文將解釋 CVD 系列 2 相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)的優(yōu)勢(shì)。
電流控制的改進(jìn)
· 采用最新的微處理器技術(shù)和先進(jìn)的算法,采用單相電流檢測(cè)方法
控制電機(jī)意味著控制流過(guò)電機(jī)繞組的電流。如果可以控制流過(guò)電機(jī)繞組的電流,則可以更平穩(wěn)地運(yùn)行電機(jī)。為此,檢測(cè)電機(jī)繞組電流的方式變得很重要。
從歷史上看,5 相步進(jìn)電機(jī)技術(shù)的優(yōu)勢(shì)之一是電路使用全相電流檢測(cè)方法,可同時(shí)檢測(cè)連接到電機(jī)的所有 5 根電機(jī)電纜(電線)的電流。由于該方法只需要一個(gè)檢測(cè)電路,電路簡(jiǎn)單。但是,這種方法無(wú)法檢測(cè)到?jīng)]有經(jīng)過(guò)檢測(cè)電路的回流電流。因此,電流控制變得不穩(wěn)定,導(dǎo)致額外的驅(qū)動(dòng)器設(shè)計(jì)步驟來(lái)控制振動(dòng)。
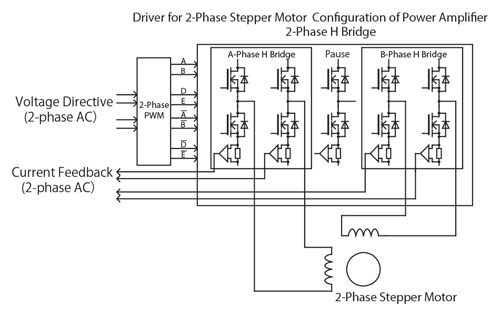
Oriental Motor 的 CVD 驅(qū)動(dòng)器使用單相電流檢測(cè)方法來(lái)改進(jìn)電流控制,該方法使用最新的微處理器分別檢測(cè) 5 種不同的電流,或者在 2 相 CVD 驅(qū)動(dòng)器的情況下,4 種不同的電流控制(參見(jiàn)圖 1)技術(shù)與先進(jìn)的算法編程。
帶電流校正的最大扭矩
· 利用電機(jī)的電磁電流特性,最大化電機(jī)扭矩輸出
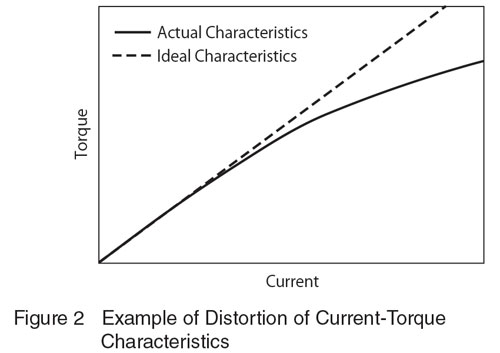
在電機(jī)繞組電流與比例扭矩輸出匹配的范圍內(nèi),電機(jī)輸出扭矩與電流成正比。隨著電流變大,即超過(guò)額定電流加在繞組上,由于磁通的電樞反應(yīng)引起的磁飽和現(xiàn)象,電流與轉(zhuǎn)矩的關(guān)系逐漸偏離其正比關(guān)系(見(jiàn)圖2). 為了提高電機(jī)的輸出轉(zhuǎn)矩,需要有效利用比例關(guān)系發(fā)生偏離的范圍。
Advanced Microstepping
· Smooth Drive,使用最新的微處理器允許在所有速度范圍內(nèi)進(jìn)行微步進(jìn)
由于步進(jìn)電機(jī)在每個(gè)步進(jìn)角運(yùn)行和停止,因此它們能夠進(jìn)行高精度的位置控制。但是,每旋轉(zhuǎn)一個(gè)基本步距角,轉(zhuǎn)子的速度就會(huì)發(fā)生變化,這可能會(huì)成為振動(dòng)或噪音的原因。已實(shí)施微步來(lái)抑制這種類型的振動(dòng)。微步進(jìn)是一種通過(guò)控制流過(guò)電機(jī)繞組的電流來(lái)劃分電機(jī)基本步距角的技術(shù)。通過(guò)減小步距角,向前移動(dòng)一步時(shí)的速度變化最小,從而可以實(shí)現(xiàn)低振動(dòng)。
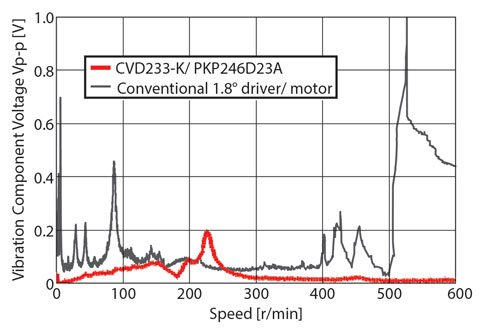
除了微步之外,CVD 還提供最先進(jìn)的微步功能 Smooth Drive 技術(shù),無(wú)需增加發(fā)送給驅(qū)動(dòng)器的脈沖。帶有 Smooth Drive ON 功能的 CVD 自動(dòng)微步,電機(jī)每整步 (1.8°) 最多可微步 2048 步 (0.0008°)。大多數(shù)微步驅(qū)動(dòng)器提供高達(dá)每轉(zhuǎn) 51,200 微步 (0.007°) 的分辨率。啟用 Smooth Drive 后,這會(huì)顯著提高所有速度范圍內(nèi)的整體性能,而不僅僅是較低的速度范圍(圖 3),從而大大減少可能導(dǎo)致步進(jìn)錯(cuò)誤的振動(dòng)。這允許更寬的電機(jī)速度設(shè)計(jì)窗口到性能結(jié)果。
最小化扭矩紋波
· 校正提供給電機(jī)的正弦電流
改變勵(lì)磁相位時(shí)輸出轉(zhuǎn)矩的波動(dòng)稱為轉(zhuǎn)矩脈動(dòng)。理論上,通過(guò)將各相產(chǎn)生的扭矩改變?yōu)檎也ǎ粫?huì)產(chǎn)生扭矩波動(dòng)。如果電機(jī)電流與產(chǎn)生的轉(zhuǎn)矩呈線性關(guān)系,則通過(guò)將各相電流變?yōu)檎也ň筒粫?huì)產(chǎn)生轉(zhuǎn)矩脈動(dòng)。但是,電機(jī)電流和產(chǎn)生的扭矩之間的關(guān)系不是線性形式。因此,當(dāng)將各相電流改變?yōu)檎也〞r(shí),電流值較大的地方會(huì)發(fā)生轉(zhuǎn)矩畸變,從而引起振動(dòng)。簡(jiǎn)而言之,同時(shí)處理高輸出扭矩和低振動(dòng)需要額外的控制機(jī)制。
為了解決這個(gè)問(wèn)題,CVD 驅(qū)動(dòng)器適當(dāng)?shù)匦U峁┙o電機(jī)的正弦電流的相位。這產(chǎn)生了校正電流-扭矩特性失真的效果,從而能夠同時(shí)處理低振動(dòng)和高輸出扭矩。此外,這還提高了停止位置的準(zhǔn)確性。
圖 4 顯示了通過(guò)相位校正改善了多少旋轉(zhuǎn)振動(dòng)特性。激活相位校正可顯著改善振動(dòng)的峰值。
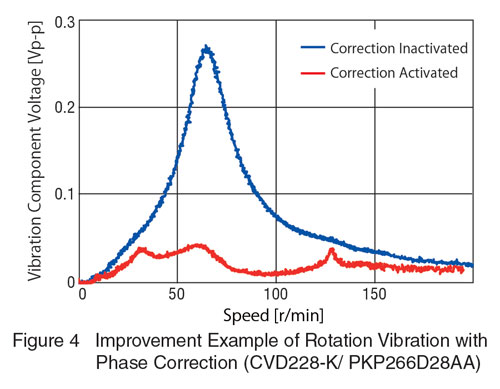
相位修正的最佳值根據(jù)電動(dòng)機(jī)的磁特性而變化。為此,為每個(gè)與電機(jī)組合的驅(qū)動(dòng)器設(shè)置最佳校正量。
考慮到電機(jī)的磁特性,進(jìn)行電流控制,同時(shí)發(fā)揮高性能——這是同時(shí)開(kāi)發(fā)電機(jī)和驅(qū)動(dòng)器的Oriental Motor的優(yōu)勢(shì)之一。
審核編輯:湯梓紅
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8695瀏覽量
149932 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3166瀏覽量
149734 -
CVD
+關(guān)注
關(guān)注
1文章
76瀏覽量
10984
發(fā)布評(píng)論請(qǐng)先 登錄
TMCM-3216步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器模塊
二相步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)
可以驅(qū)動(dòng)兩個(gè)直流有刷電機(jī)、一個(gè)雙極步進(jìn)電機(jī)的雙H橋電機(jī)驅(qū)動(dòng)芯片-SS8833E

步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些分類,如何選型?

EVL6480 步進(jìn)電機(jī)驅(qū)動(dòng)器評(píng)估板

探索TB62214FG:高性能雙極步進(jìn)電機(jī)驅(qū)動(dòng)IC,助力精確控制
步進(jìn)電機(jī)驅(qū)動(dòng)器的主要驅(qū)動(dòng)方式有哪些?簡(jiǎn)單介紹
步進(jìn)電機(jī)驅(qū)動(dòng)器的主要工作原理是什么?
步進(jìn)電機(jī)驅(qū)動(dòng)器有哪些類型?該如何分類?
什么是步進(jìn)電機(jī)驅(qū)動(dòng)器?它具有什么特點(diǎn)?
Toshiba東芝TB62269FTG雙極步進(jìn)電機(jī)驅(qū)動(dòng)器英文手冊(cè)
#參考設(shè)計(jì)# 3A,8 ~ 60 V,雙極步進(jìn)電機(jī)驅(qū)動(dòng)器

步進(jìn)驅(qū)動(dòng)器的作用及種類






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論