 探究驅動電機用霍爾傳感器的設計方法 3
探究驅動電機用霍爾傳感器的設計方法 3
5 霍爾傳感器的測試方法
本文僅介紹霍爾傳感器的精度測試方法。所謂霍爾精度,即霍爾傳感器跳變沿與反電勢對應點的相位差,相位差越接近0代表霍爾精度越高。
測試準備
在前期準備時,按照電機反電勢測量的標準準備實驗設備即可,以下默認電機能夠正常勻速旋轉,實驗室有示波器一臺。電機三相記作ABC,霍爾三相記作UVW,電機及霍爾各相一一對應,即A-U、B-V、C-W。
測試項次
1 三相霍爾信號
2 各相霍爾信號精度
三相霍爾信號
使用三個示波器探頭分別測量霍爾三相輸出線,記錄下霍爾波形,測量以下參數:
表5.1 記錄參數表
| 記錄參數 | 參數作用 |
|---|---|
| 一個機械周期所對應的霍爾信號波形 | 觀察霍爾信號編碼順序是否與設計值相同觀察各相各電周期中占空比是否為50% |
| U相上升沿與V相上升沿的時間差 | 將該時間差換算成電角度,觀察是否滿足設計要求 |
| V相上升沿與W相上升沿的時間差 | 將該時間差換算成電角度,觀察是否滿足設計要求 |
| W相上升沿與U相上升沿的時間差 | 將該時間差換算成電角度,觀察是否滿足設計要求 |
標準波形如下圖所示:
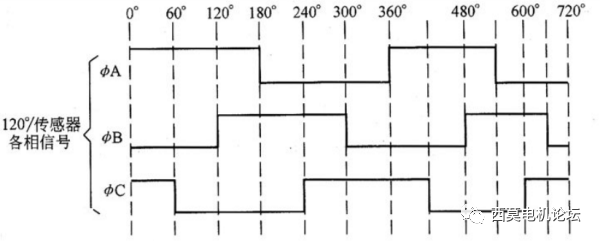
圖5.1 典型120°霍爾測試波形
時間差換算電角度公式如下:

各相霍爾精度測試
在進行該項測試時,示波器最好選用隔離示波器,若不使用隔離示波器則可能會有高壓反電勢與低壓霍爾信號之間產生干擾的風險,影響測量精度。
示波器通道1接引出線AB,測量線反電勢,通道2接U相,測量線反電勢的過零點與U相上升沿、線反電勢的過零點與U相下降沿的時間差,換算成電角度后觀察是否滿足前期設計要求。其余兩相可按照相同方法進行測量,單位可以是時間也可以是電角度,測量完成后記錄成如下表格:
表5.2 測試結果記錄表
| 接線 | 測量點 | 周期1 | 周期2 | 周期3 | 周期4 | 周期n |
|---|---|---|---|---|---|---|
| AB-U | 上升沿 | |||||
| 下降沿 | ||||||
| BC-V | 上升沿 | |||||
| 下降沿 | ||||||
| CA-W | 上升沿 | |||||
| 下降沿 | ||||||
若實驗條件足夠,可進行多通道同時測量,則可以在電機ABC各相上連接一顆電阻,電阻應大于10K,將三顆電阻另一端連接在一塊,形成一個“Y”形回路,此時測量的三相反電勢即為相反電勢。霍爾跳變沿應與兩相之間的交點相對應,測試記錄表格與上表相同,標準測試波形如下圖所示:

圖5.2 典型6通道測試波形
6 霍爾測試時常見的波形問題
以8極48槽電機為例,當電機處于9000rpm時,反電勢頻率為600Hz,霍爾頻率為600Hz,為方便講解,使用單相反電勢與霍爾波形測試結果作為示例,其中紅色信號為霍爾波形,藍色信號為反電勢波形,根據4.4所述的問題,分別列出其典型波形圖如下:
1 正常波形如下圖所示:

2 霍爾信號不變,不能隨磁場變化做出跳變。

3 霍爾信號跳變沿與反電勢過零點的電角度差過大。

由圖可看出霍爾電信號均超前與反電勢波形,測量點1為霍爾跳變點,測量點2為反電勢過零點,測量點1、2之間時間差為96us。通過5.1中所示公式計算可得,當前電角度差為(96/1666)*360=20.7°。
4 霍爾信號占空比不準確,不是精確的50%占空比。

5 兩相霍爾信號之間的電角度差值與設計值不符。

由圖可看出,紅色相與藍色相有120°的電角度差,綠色相與藍色相電角度差不為120°,所以綠色相存在電角度分布不正確的問題。
7 總結
隨著電動車的愈發普及,電車市場不斷增長,勢必會帶動下沉市場產品油轉電升級,在可預見的將來,該市場產品對霍爾方案的嘗試會逐步增多。通過本文所述的設計方法,能夠從元器件選型、霍爾檢測位置、定位方式選擇等幾個方面完成一種穩定的霍爾傳感器設計。
-
汽車電動
+關注
關注
0文章
11瀏覽量
10203 -
霍爾傳感器
+關注
關注
28文章
753瀏覽量
64137 -
驅動電機
+關注
關注
9文章
422瀏覽量
31199
發布評論請先 登錄
探究驅動電機用霍爾傳感器的設計方法 1
探究驅動電機用霍爾傳感器的設計方法 2





 工商網監
工商網監
評論