") 基于電流采樣模塊的2D數(shù)字伺服閥控制器設(shè)計(jì)
基于電流采樣模塊的2D數(shù)字伺服閥控制器設(shè)計(jì)
引言
流量、頻響和精度是評(píng)價(jià)電液伺服系統(tǒng)好壞的重要指標(biāo)。如何提高性能,滿足各種應(yīng)用場(chǎng)合,已經(jīng)成為電液伺服系統(tǒng)研究中亟待突破的重要課題。電液伺服閥是電液伺服系統(tǒng)的核心控制元件,其性能在很大程度上決定了整個(gè)系統(tǒng)的性能。
數(shù)字控制技術(shù)的不斷發(fā)展,推動(dòng)了數(shù)字閥的出現(xiàn),如2D數(shù)字伺服閥。由于2D數(shù)字伺服閥將導(dǎo)控級(jí)和功率級(jí)集成在閥芯上,具有結(jié)構(gòu)簡(jiǎn)單、體積小、響應(yīng)速度快、精度高、抗污染能力好等優(yōu)點(diǎn),使其在軍工領(lǐng)域得到了較好的應(yīng)用。
2D數(shù)字伺服閥以步進(jìn)電機(jī)作為電—機(jī)械轉(zhuǎn)換器,其性能在很大程度上決定了2D數(shù)字伺服閥的性能。
2D數(shù)字伺服閥的控制原理
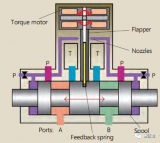
2D數(shù)字伺服閥的機(jī)械部分主要由閥芯和閥體組成,名稱由來是因?yàn)殚y芯可以在閥體內(nèi)完成水平和旋轉(zhuǎn)兩種運(yùn)動(dòng)。
2D數(shù)字伺服閥運(yùn)用伺服螺旋機(jī)構(gòu),將功率級(jí)和先導(dǎo)級(jí)集成在閥芯上。通過改變控制信號(hào),經(jīng)過控制器內(nèi)部算法的調(diào)整,使電-機(jī)械轉(zhuǎn)換器(步進(jìn)電機(jī))兩相繞組的電流發(fā)生變化,改變電-機(jī)械轉(zhuǎn)換器的旋轉(zhuǎn)角度,經(jīng)過撥桿撥叉機(jī)構(gòu),帶動(dòng)閥芯做旋轉(zhuǎn)運(yùn)動(dòng),具體的結(jié)構(gòu)參考參考文獻(xiàn)3。
在閥芯旋轉(zhuǎn)的同時(shí),由于敏感腔壓力的變化,使閥芯同時(shí)作直線運(yùn)動(dòng),改變閥口的開口量,實(shí)現(xiàn)對(duì)流量的調(diào)節(jié)。
2D數(shù)字伺服閥是以混合式步進(jìn)電機(jī)作為電—機(jī)械轉(zhuǎn)換器。傳統(tǒng)上步進(jìn)電動(dòng)機(jī)是以步進(jìn)的方式工作的,使得閥的分辨率較低。雖然采用細(xì)分的方式可以增加模擬極對(duì)數(shù),提高分辨率,但卻降低了閥的響應(yīng)速度,存在著分辨率和響應(yīng)速度之間的矛盾。
實(shí)際上,混合式步進(jìn)電動(dòng)本質(zhì)上可以看成多極永磁感應(yīng)子式同步電機(jī),當(dāng)電機(jī)兩相繞組分別通相位相差90°的電流時(shí),在電機(jī)內(nèi)部會(huì)產(chǎn)生一個(gè)旋轉(zhuǎn)磁場(chǎng),在此旋轉(zhuǎn)磁場(chǎng)的作用下,電機(jī)轉(zhuǎn)子產(chǎn)生轉(zhuǎn)動(dòng),當(dāng)兩相電流變化一周,旋轉(zhuǎn)磁場(chǎng)在電流內(nèi)部旋轉(zhuǎn)一周,電機(jī)轉(zhuǎn)子轉(zhuǎn)過一個(gè)齒距角,因此,通過對(duì)兩相電流的控制,可以旋轉(zhuǎn)磁場(chǎng)的旋轉(zhuǎn)運(yùn)動(dòng)從而驅(qū)動(dòng)轉(zhuǎn)子在任意位置快速定位。
根據(jù)上述思想,這里提出了步進(jìn)電動(dòng)機(jī)電流和位置雙閉環(huán)控制方式,如圖1所示。圖1中,電流閉環(huán)的目的就是產(chǎn)生驅(qū)動(dòng)電機(jī)轉(zhuǎn)子快速在任意位置定位的恒定幅值的旋轉(zhuǎn)磁場(chǎng)。
圖1中的位置閉環(huán)的目的就是實(shí)現(xiàn)轉(zhuǎn)子無失步地位置控制,克服步進(jìn)電動(dòng)機(jī)傳統(tǒng)控制下不可避免的失步缺點(diǎn)。通過電流和位置雙閉環(huán)控制,使得2D數(shù)字伺服閥電—機(jī)械轉(zhuǎn)換器兼具高響應(yīng)速度和分辨率。
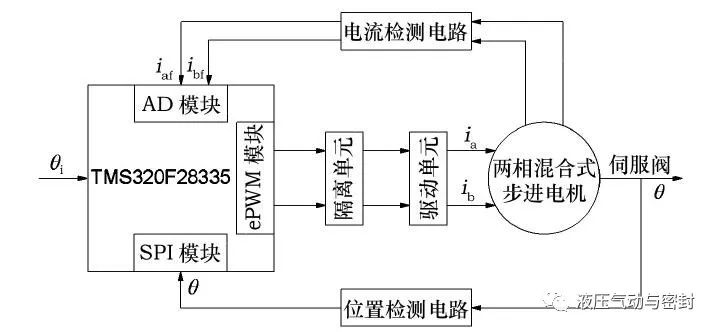
圖1 2D數(shù)字閥電-機(jī)械轉(zhuǎn)換器的控制原理
控制器的軟硬件設(shè)計(jì)
2.1 控制器的硬件設(shè)計(jì)
1)主控單元的設(shè)計(jì)
在電-機(jī)械轉(zhuǎn)換器的控制中采用模糊PID控制算法,實(shí)現(xiàn)PID參數(shù)的實(shí)時(shí)調(diào)節(jié),達(dá)到提高動(dòng)靜態(tài)特性的目的。設(shè)計(jì)選擇的主控芯片是TMS320F28335DSP芯片。
這款芯片是可以計(jì)算32位乘加運(yùn)算的浮點(diǎn)數(shù)字信號(hào)處理芯片,主頻最高可達(dá)150MHz,可以用來控制電機(jī)和各種電力設(shè)備。
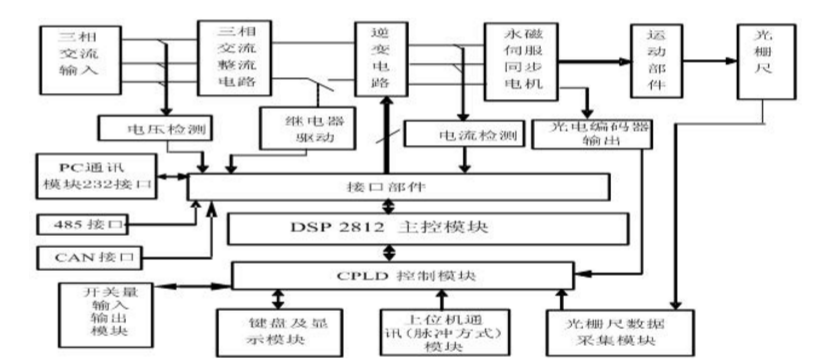
主控芯片主要完成對(duì)兩相電流的采樣值和位移傳感器的角位移值的處理,實(shí)現(xiàn)PID控制和相位補(bǔ)償?shù)人惴āV骺仉娐肥疽鈭D如圖2所示。
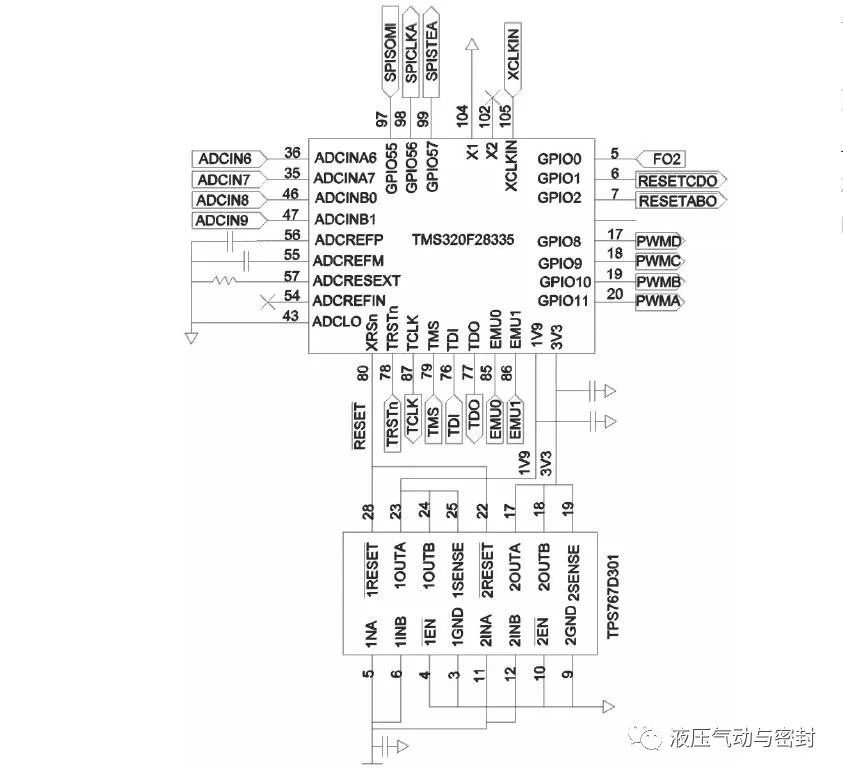
圖2 主控電路示意圖
2)驅(qū)動(dòng)模塊的設(shè)計(jì)
電-機(jī)械轉(zhuǎn)換器選用的是兩相混合式步進(jìn)電機(jī),它的控制需要兩個(gè)H橋單元。每個(gè)H橋單元都由4個(gè)MOSEFT管以及其他的電阻、電容、二極管等器件組成。這樣造成控制器的體積較大,不利于和閥體集成在一起。為了解決這個(gè)問題,本次設(shè)計(jì)采用的A5988:四路DMOS全橋式PWM電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)芯片。
A5988 是一種四路 DMOS 全橋式驅(qū)動(dòng)器 IC,最多可以驅(qū)動(dòng)兩臺(tái)步進(jìn)電機(jī)或四臺(tái)直流機(jī)每個(gè)全橋輸出的額定值為 1.6 A 和 40 V。A5988 包括固定停機(jī)時(shí)間脈寬調(diào)制 (PWM) 電流穩(wěn)壓器和 2 位非線性 DAC (數(shù)字-模擬轉(zhuǎn)換器),DAC 可以以全步進(jìn)、半步進(jìn)、四分之一或八分之一步進(jìn)模式控制步進(jìn)電機(jī),并可以以向前、反轉(zhuǎn)和滑行模式控制直流電機(jī)PWM 電流穩(wěn)壓器使用 Allegro 專利混合衰減模式來減少可聞電機(jī)噪音、增加步進(jìn)精確度并減少功率耗散。
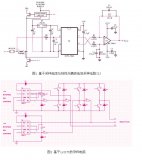
提供的內(nèi)部同步整流控制電路可以改善 PWM 操作過程中的功耗。保護(hù)功能包括滯后過熱關(guān)機(jī)、欠電壓鎖定 (UVLO) 及交叉電流保護(hù)。不需要特別的加電排序。 驅(qū)動(dòng)電路圖如圖3所示。
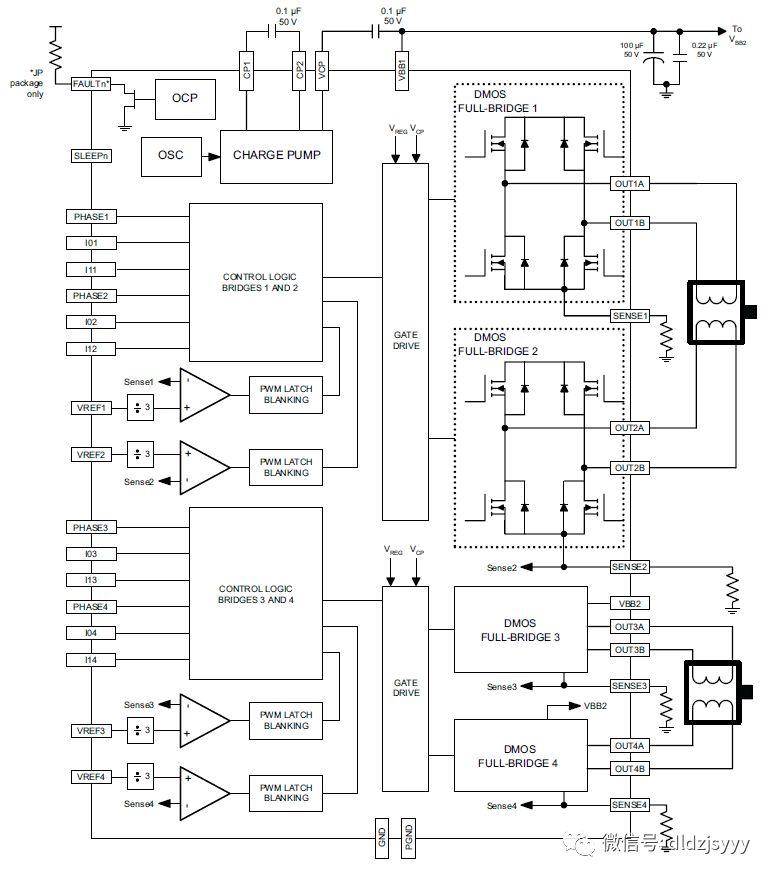
圖3 驅(qū)動(dòng)模塊設(shè)計(jì)
3)電流采樣模塊設(shè)計(jì)
電流采樣一般采用的是在回路中串入電阻,利用安培定理,檢測(cè)電阻上的壓降來得到流過電阻的電流。采樣電阻比較精密,并且阻值比較小,一般為0.01~0.1Ω左右。由于被檢測(cè)的電流的幅值較大,所以所需要的采樣電阻的功率也較大,體積也較大。為了減小控制器的體積,本次設(shè)計(jì)采用的是ACS712(或***CH701)線性霍爾電流傳感器。
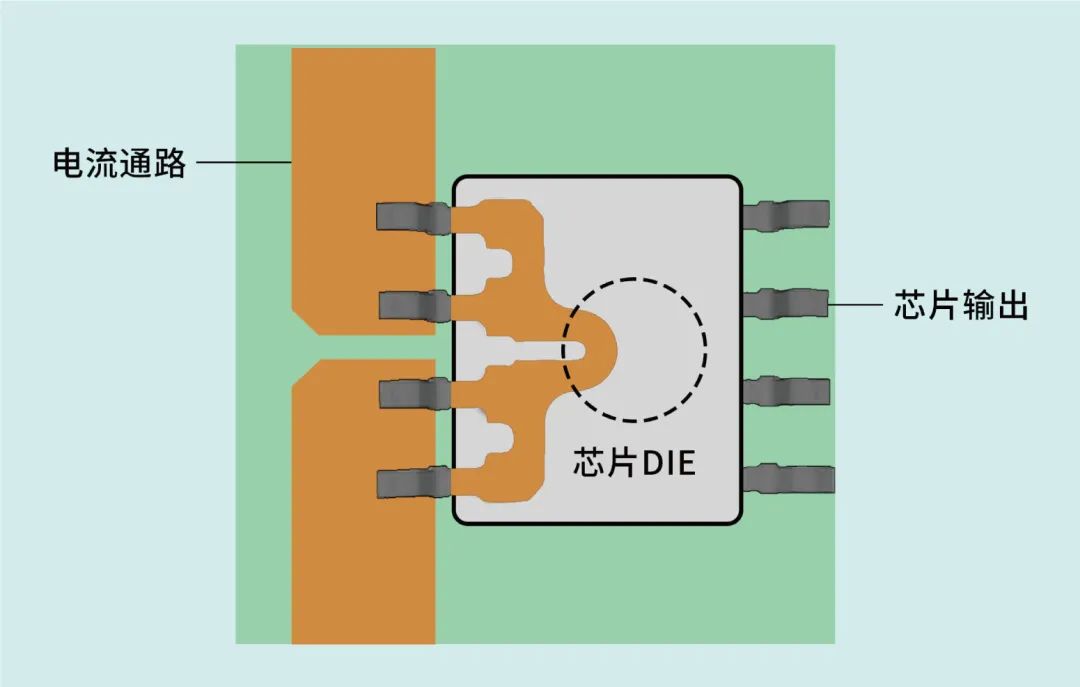
傳感器的內(nèi)部集成有一個(gè)高精度、低偏置和線性的霍爾傳感器。當(dāng)霍爾傳感器檢測(cè)到由于銅導(dǎo)路徑電流流過而產(chǎn)生的磁場(chǎng)時(shí),將其轉(zhuǎn)化為成比例的電壓。此傳感器可以流過的電流最大為5A,內(nèi)部銅導(dǎo)路徑的阻抗為1.2mΩ,所以功率損失比較小。
傳感器在沒有電流流過時(shí),輸出端口的電壓為供電電壓的50%,精度為0.185V/A。采樣得到的輸出電壓,需要經(jīng)過放大器的變換,輸入到DSP的AD模塊。電流采樣模塊主要用來實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)兩相電流的采樣,從而構(gòu)成電流閉環(huán),提高控制的精度和響應(yīng)速度。具體的設(shè)計(jì)電路如圖4所示。
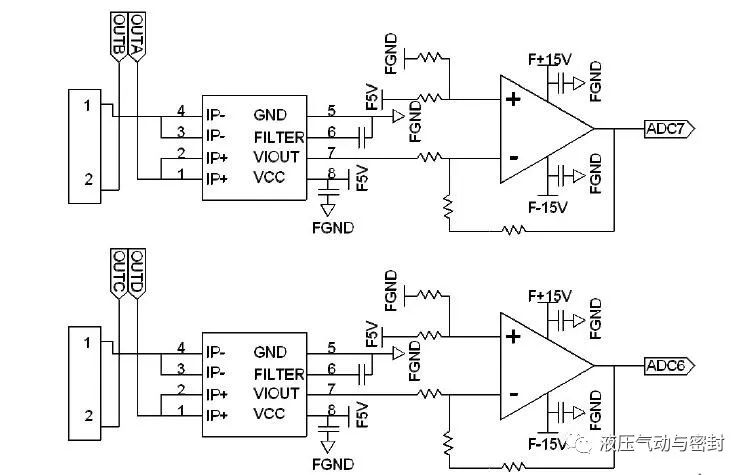
圖4 電流采樣電路
2.2控制器的軟件設(shè)計(jì)
軟件主要是為了實(shí)現(xiàn)電流和位置雙閉環(huán),以及相位補(bǔ)償?shù)取Mㄟ^算法調(diào)整輸出PWM波的占空比,改變兩相繞組的電流大小。系統(tǒng)程序流程圖如圖5。
軟件設(shè)計(jì)主要分為ePWM、SPI和AD等模塊的中斷程序設(shè)計(jì)。
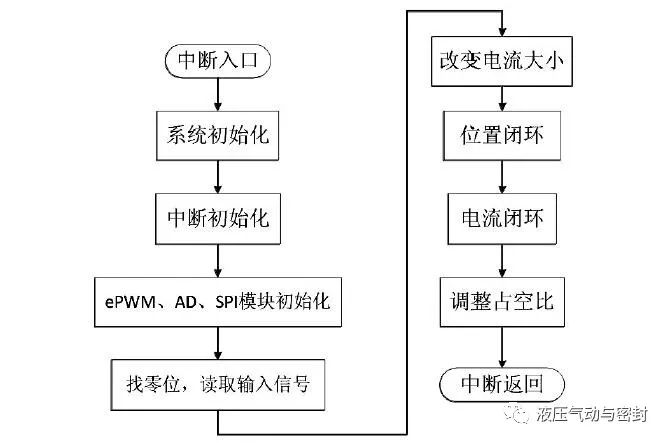
圖5 程序流程圖
1)ePWM中斷子程序
ePWM中斷子程序主要根據(jù)輸入信號(hào)和由角位移傳感器檢測(cè)到的角位移信號(hào)以及電流傳感器檢測(cè)到的兩相電流來實(shí)現(xiàn)電流環(huán)和位置環(huán)雙閉環(huán)。通過PID以及相位補(bǔ)償算法進(jìn)一步提高控制的精度和動(dòng)靜態(tài)特性。同時(shí)子程序還完成上電后零位的查找。
2)SPI中斷子程序
SPI中斷子程序主要用來接收角位移傳感器輸出的電-機(jī)械轉(zhuǎn)換器(步進(jìn)電機(jī))的轉(zhuǎn)子的旋轉(zhuǎn)角度,并對(duì)其進(jìn)行處理。為了提高角位移信號(hào)的精度,對(duì)三次采樣的角位移值進(jìn)行排序,然后取中間值作為當(dāng)前的角位移值。
3)AD中斷子程序
輸入信號(hào)和兩相電流的采樣值都要經(jīng)過AD采樣后,再進(jìn)行平均,作為輸入信號(hào)和電流采樣值輸入到DSP中。F28335的AD模塊有16路采樣電路,可以對(duì)輸入信號(hào)和電流采樣信號(hào)進(jìn)行多次采樣,然后對(duì)采樣值進(jìn)行排序,去掉大、小兩個(gè)極值進(jìn)行平均運(yùn)算,得出采樣電流和輸入信號(hào)。
結(jié)論
以CH701為電流檢測(cè)芯片芯片,改變電流檢測(cè)的方式和電-機(jī)械轉(zhuǎn)換器的驅(qū)動(dòng)方式,不僅利于閥體和控制器的集成,還提高了伺服閥的動(dòng)靜態(tài)特性。
通過試驗(yàn)可以得知,在設(shè)計(jì)的控制器的控制下,2D數(shù)字伺服閥的頻寬為180Hz左右,階躍上升時(shí)間為6.5ms,提升了伺服閥的整體性能。
CH701霍爾電流傳感器IC,是工業(yè)、汽車、商業(yè)和通信系統(tǒng)中交流或直流電流傳感的經(jīng)濟(jì)而精確的解決方案。
小封裝是空間受限應(yīng)用的理想選擇,同時(shí)由于減少了電路板面積而節(jié)省了成本。典型應(yīng)用包括電機(jī)控制、負(fù)載檢測(cè)和管理、開關(guān)電源和過電流故障保護(hù)。

CH701可以檢測(cè)到50A峰值的電流。
如果需要檢測(cè)更大電流,需要更高的隔離電壓,可以選擇更大電流范圍的產(chǎn)品,比如16腳的CH701W系列,電流范圍可以到70A,絕緣耐壓可以到4800Vrms:

審核編輯:劉清
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3157瀏覽量
149132 -
DMOS
+關(guān)注
關(guān)注
0文章
37瀏覽量
14978 -
伺服控制器
+關(guān)注
關(guān)注
2文章
93瀏覽量
19120 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
584瀏覽量
39877 -
電流采樣
+關(guān)注
關(guān)注
2文章
49瀏覽量
17141
原文標(biāo)題:2D數(shù)字伺服閥控制器的設(shè)計(jì)中基于ACS712(CH701)電流采樣模塊的設(shè)計(jì)
文章出處:【微信號(hào):dldzjsyyy,微信公眾號(hào):電力電子技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
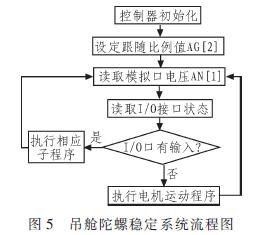
基于數(shù)字伺服控制器的吊艙陀螺穩(wěn)定平臺(tái)設(shè)計(jì)
伺服驅(qū)動(dòng)器中電流采樣電路設(shè)計(jì)

基于STC12C5A60S2與無線CC1101的電動(dòng)溫控閥控制器設(shè)計(jì)
適用于顯示屏的2D多點(diǎn)觸摸與3D手勢(shì)模塊
關(guān)于數(shù)字化伺服系統(tǒng)電流中三種采樣方案的對(duì)比
淺析伺服驅(qū)動(dòng)器中的常規(guī)電流采樣電路設(shè)計(jì)
電液伺服閥頻率測(cè)試_電液伺服閥結(jié)構(gòu)圖

電液伺服閥作用_電液伺服閥選型
伺服控制器是什么_伺服控制器用途

伺服環(huán)路控制器的數(shù)字化設(shè)計(jì)

液壓伺服系統(tǒng)選用控制閥的方法介紹
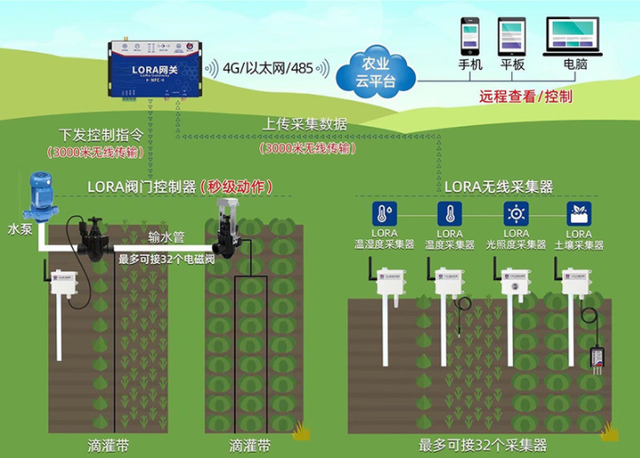
智能農(nóng)業(yè)灌溉方案系統(tǒng)——電磁閥控制器工作原理
電流傳感器AH91X(ACS712)用于2D數(shù)字伺服閥控制器設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論