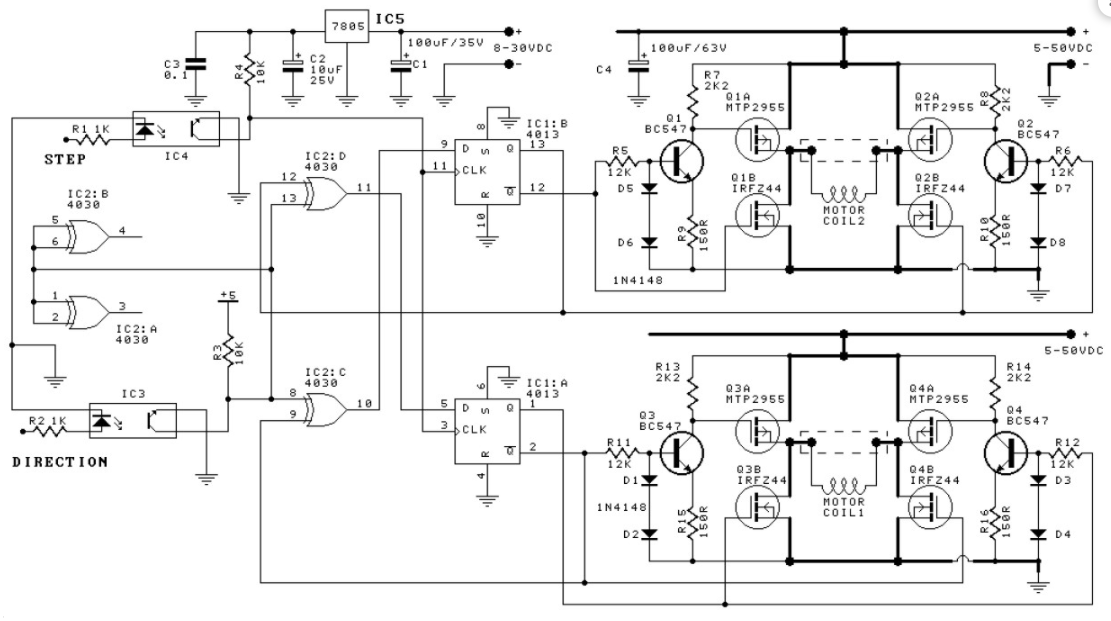
") 雙極步進(jìn)電機(jī)驅(qū)動(dòng)器的元件很少
雙極步進(jìn)電機(jī)驅(qū)動(dòng)器的元件很少
作為步進(jìn)電機(jī)復(fù)雜驅(qū)動(dòng)電路的替代方案,這種方法采用纖巧的表面貼裝2.8W D類音頻放大器,通常驅(qū)動(dòng)4W或8W揚(yáng)聲器。兩個(gè)內(nèi)部 H 橋驅(qū)動(dòng)輸出對(duì) OUTR± 和 OUTL±,它們直接連接到步進(jìn)電機(jī)的 A 和 B 繞組。每對(duì)承載一個(gè)標(biāo)稱中心頻率為1.22MHz的差分PWM信號(hào)。
介紹
雙極單繞組步進(jìn)電機(jī)為給定尺寸提供強(qiáng)大的扭矩,但它們價(jià)格昂貴,并且需要八個(gè)驅(qū)動(dòng)晶體管:兩個(gè)電機(jī)繞組中每個(gè)四個(gè)采用 H 橋配置。由于每個(gè)晶體管必須能夠承受過流和短路條件并從中快速恢復(fù),因此典型的電機(jī)驅(qū)動(dòng)器電路非常復(fù)雜且物理尺寸龐大。
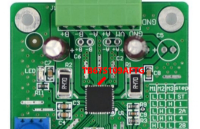
作為此類電機(jī)的替代方案,請(qǐng)考慮圖1所示的微型表面貼裝驅(qū)動(dòng)器電路。低EMI、無濾波、2.8W D類音頻放大器(MAX9715、U1)通常用于驅(qū)動(dòng)4Ω或8Ω揚(yáng)聲器。兩個(gè)內(nèi)部 H 橋驅(qū)動(dòng)輸出對(duì) OUTR± 和 OUTL±,它們直接連接到步進(jìn)電機(jī)的 A 和 B 繞組。每對(duì)承載一個(gè)標(biāo)稱中心頻率為1.22MHz的差分PWM信號(hào)。
圖1.這種小型表面貼裝電路驅(qū)動(dòng)雙極單線繞組步進(jìn)電機(jī)。
電容 C1、C3、C4 和 C6 為相關(guān)的 U1 引腳提供旁路,C8–C9 將輸入帶寬限制為 16Hz,L2-L3 阻止長輸入電纜拾取的任何電噪聲。五世DD輸入由C1、C2和鐵氧體磁珠L1組成的PI噪聲濾波器濾波。C5 和 C7 為 D 類功率放大器輸出提供大容量保持電容。
合適的控制器將數(shù)字脈沖饋送到A_Step和B_Step輸入,分別代表電機(jī)的左右通道。內(nèi)部短路和熱保護(hù)可保護(hù)放大器免受步進(jìn)電機(jī)或其連接引線引起的過流和短路的影響。
表 1 顯示了沿正向驅(qū)動(dòng)典型步進(jìn)電機(jī)所需的A_Step和B_Step脈沖序列(圖 2)。(只需連續(xù)應(yīng)用步驟 0 到 4。要反轉(zhuǎn)電機(jī),您可以通過從桌子底部開始向上工作來反轉(zhuǎn)模式。同樣,C8和C9將最小脈沖速率限制為16Hz。如果需要,您可以通過對(duì)/SHDN輸入(引腳8)施加邏輯低電平來禁用放大器。
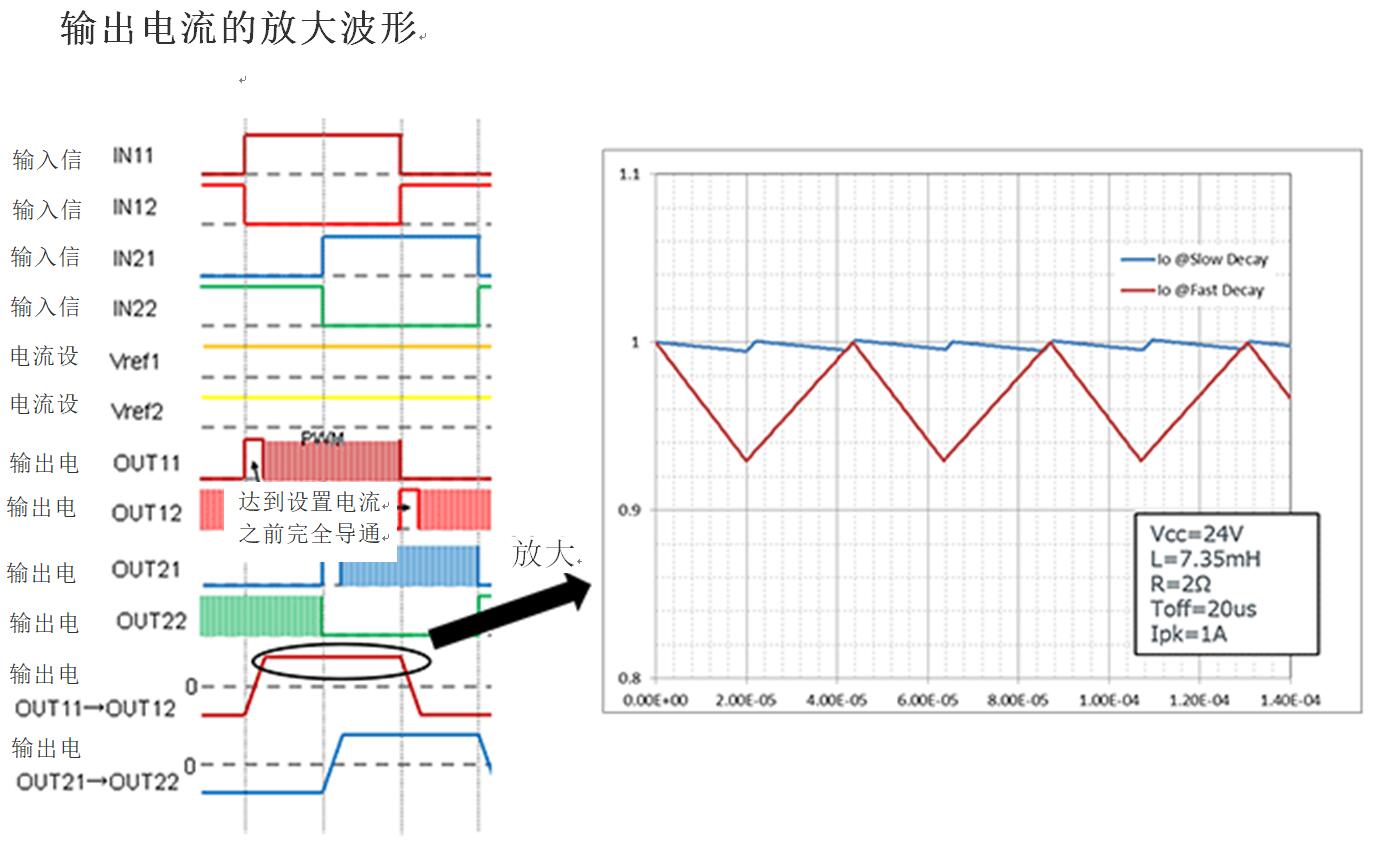
圖2.圖1電路的波形:A_Step輸入(通道1)、B_Step輸入(通道2)、OUTR+(通道3)、OUTR-(通道4)以及電機(jī)繞組實(shí)際看到的信號(hào)(OUTR+減去OUTR-),由示波器計(jì)算為“數(shù)學(xué)”。
| 步# | A_Step | B_Step |
| 0 | H | L |
| 1 | L | L |
| 2 | L | H |
| 3 | H | H |
| 4 | H | L |
審核編輯:郭婷
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8636瀏覽量
149101 -
emi
+關(guān)注
關(guān)注
53文章
3711瀏覽量
130336 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3158瀏覽量
149161
發(fā)布評(píng)論請(qǐng)先 登錄
用于PWM控制的雙極步進(jìn)電機(jī)驅(qū)動(dòng)器
基于3955的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì)
七特步進(jìn)電機(jī)驅(qū)動(dòng)器型號(hào)
步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)速方法_步進(jìn)電機(jī)驅(qū)動(dòng)器的作用
步進(jìn)電機(jī)驅(qū)動(dòng)器怎么設(shè)置細(xì)分
步進(jìn)電機(jī)驅(qū)動(dòng)器有什么參數(shù)_步進(jìn)電機(jī)驅(qū)動(dòng)器常見故障維修
雙極步進(jìn)電機(jī)驅(qū)動(dòng)器電路圖
TB67S109AFNG時(shí)鐘控制雙極步進(jìn)電機(jī)驅(qū)動(dòng)器數(shù)據(jù)手冊
TB8825FNG兩相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器IC手冊
兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其1

兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng) 其2
克服旋轉(zhuǎn)振動(dòng)的CVD系列2相雙極步進(jìn)電機(jī)驅(qū)動(dòng)器
步進(jìn)電機(jī)的雙極連接和單極連接驅(qū)動(dòng)方法
控制的雙極步進(jìn)電機(jī)驅(qū)動(dòng)器介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論