") 對(duì)雷達(dá)實(shí)施距離拖引干擾的過(guò)程是怎樣的
對(duì)雷達(dá)實(shí)施距離拖引干擾的過(guò)程是怎樣的

對(duì)雷達(dá)實(shí)施距離拖引干擾的過(guò)程如下:
1. 干擾脈沖捕獲距離波門(mén)
載機(jī)收到雷達(dá)脈沖后,以最小的延遲通過(guò)誘餌轉(zhuǎn)發(fā)一個(gè)干擾脈沖,干擾脈沖與目標(biāo)回波脈沖幾乎重合,但干擾脈沖信號(hào)幅度J大于目標(biāo)回波脈沖信號(hào)幅度S,雷達(dá)的AGC電路將按干擾信號(hào)幅度調(diào)整電路的增益,保證雷達(dá)接收機(jī)的輸出信號(hào)處在一定的動(dòng)態(tài)范圍以內(nèi)。
這樣保持一段時(shí)間,稱為停拖,其目的是使干擾信號(hào)與目標(biāo)信號(hào)同時(shí)處在距離波門(mén)上,使得干擾信號(hào)能夠截獲雷達(dá)的距離波門(mén)。停拖時(shí)間要求大于雷達(dá)接收機(jī)自動(dòng)增益控制電路的慣性時(shí)間。
2. 距離波門(mén)拖引
當(dāng)雷達(dá)距離波門(mén)可靠地跟蹤到干擾脈沖后,誘餌干擾機(jī)在轉(zhuǎn)發(fā)干擾脈沖時(shí),逐步增加轉(zhuǎn)發(fā)脈沖相對(duì)于回波脈沖的時(shí)間延遲,使得距離波門(mén)隨干擾脈沖移動(dòng)時(shí),目標(biāo)回波脈沖逐步離開(kāi)到波門(mén)以外,直到距離波門(mén)的中心位置偏離目標(biāo)位置若干個(gè)波門(mén)的寬度。距離拖引時(shí)要求拖引速度(誘餌脈沖的距離變化率)小于雷達(dá)跟蹤系統(tǒng)的最大速度指標(biāo)。
3. 干擾機(jī)關(guān)機(jī)
用干擾脈沖將距離波門(mén)從目標(biāo)脈沖處拖開(kāi)足夠大的距離以后,關(guān)閉干擾機(jī),這時(shí)制導(dǎo)雷達(dá)距離波門(mén)內(nèi)既無(wú)目標(biāo)回波也無(wú)干擾脈沖,即目標(biāo)丟失,此時(shí)雷達(dá)系統(tǒng)的距離波門(mén)重新轉(zhuǎn)入搜索狀態(tài)。
如果雷達(dá)重新搜索到目標(biāo),則干擾機(jī)可以重復(fù)上述過(guò)程,繼續(xù)實(shí)施拖引干擾。對(duì)于雷達(dá)而言,彈目之間的交會(huì)時(shí)間很短,尤其是在近距離情況下,目標(biāo)丟失后,來(lái)不及重新搜索和捕獲目標(biāo),會(huì)造成導(dǎo)彈的脫靶。
RGPO模型算法
下面對(duì)RGPO的模型算法進(jìn)行分析。距離波門(mén)拖引(勻速拖引)干擾中假目標(biāo)的距離函數(shù)可以表示為: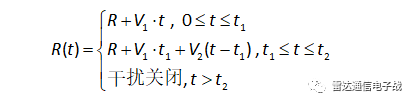
在距離波門(mén)拖引過(guò)程中,為了保證距離跟蹤的持續(xù)性,起始拖引假目標(biāo)與目標(biāo)回波時(shí)延要求很小,雷達(dá)處理后的跟蹤航跡才能夠逐漸地偏離真實(shí)目標(biāo)艦船,否則雷達(dá)將無(wú)法丟失對(duì)真實(shí)目標(biāo)的跟蹤。 對(duì)采用線性調(diào)頻體制的雷達(dá)移頻拖引干擾實(shí)現(xiàn)過(guò)程進(jìn)行分析。LFM信號(hào)是一種典型的脈沖壓縮信號(hào),它通過(guò)非線性相位調(diào)制來(lái)獲得大時(shí)寬帶寬積。采用這種信號(hào)的雷達(dá)能夠同時(shí)獲得遠(yuǎn)的作用距離和高的分辨率。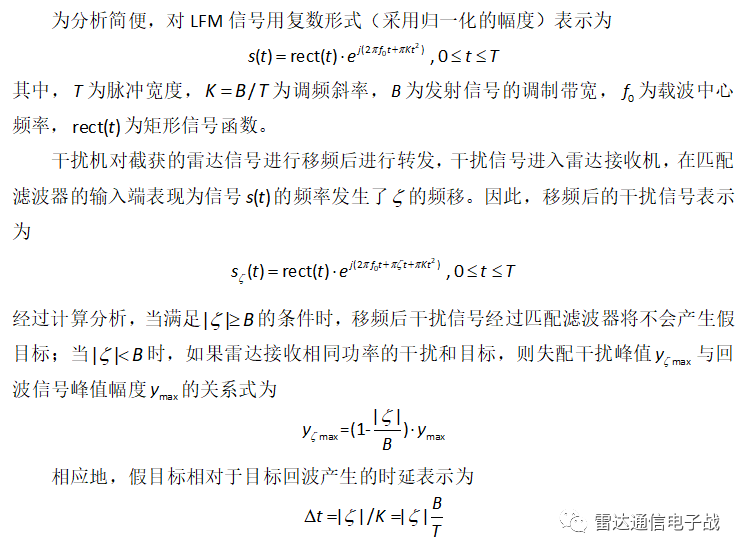
根據(jù)LFM信號(hào)時(shí)延與頻移之間的關(guān)系式,有源干擾時(shí)通過(guò)對(duì)截獲的雷達(dá)發(fā)射信號(hào)調(diào)制一個(gè)附加的頻率后轉(zhuǎn)發(fā)給雷達(dá),就可以使雷達(dá)產(chǎn)生一個(gè)假目標(biāo),假目標(biāo)或領(lǐng)先于匹配目標(biāo),或者滯后于匹配目標(biāo),取決于給定移頻量的正值或是負(fù)值。
根據(jù)雷達(dá)脈沖到達(dá)時(shí)間(TOA)對(duì)移頻量進(jìn)行調(diào)整,可以使得假目標(biāo)不斷地偏移目標(biāo)回波,從而形成距離波門(mén)干擾。
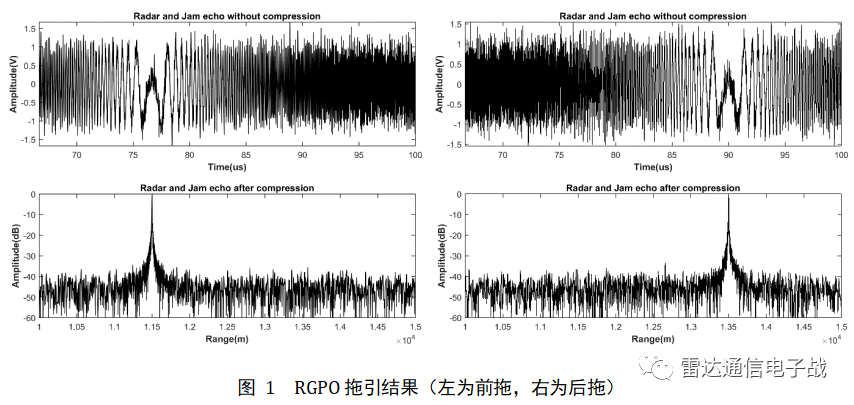
當(dāng)移頻量為負(fù)值時(shí),將產(chǎn)生距離波門(mén)后拖干擾;當(dāng)移頻量為正值時(shí),將產(chǎn)生距離波門(mén)前拖干擾。
對(duì)于自衛(wèi)式干擾,R,V取值均為0,為拖引開(kāi)始時(shí)間,在實(shí)際建模過(guò)程中可將其設(shè)置為0,則勻速拖引時(shí)拖引期假目標(biāo)拖引距離表示為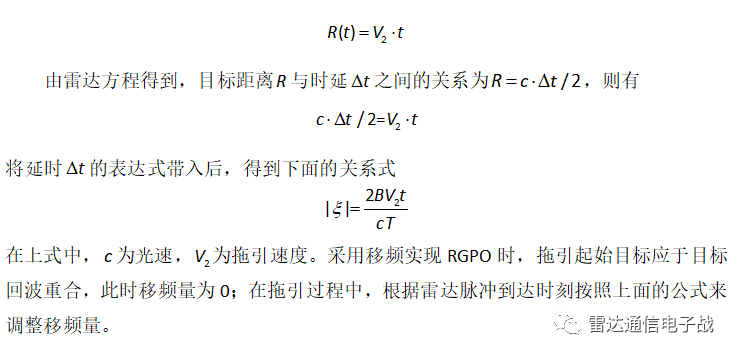
審核編輯:劉清
-
雷達(dá)接收機(jī)
+關(guān)注
關(guān)注
0文章
23瀏覽量
9893 -
AGC
+關(guān)注
關(guān)注
0文章
168瀏覽量
52589 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
402瀏覽量
37641
原文標(biāo)題:對(duì)雷達(dá)實(shí)施距離拖引干擾的過(guò)程
文章出處:【微信號(hào):雷達(dá)通信電子戰(zhàn),微信公眾號(hào):雷達(dá)通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雷達(dá)物位計(jì)干擾因素詳解
控制器距離電機(jī)近的時(shí)候 OT就有輸出,避免電磁干擾的辦法有哪些?

定華雷達(dá)儀表學(xué)堂:雷達(dá)物位計(jì)的維護(hù)檢修規(guī)范
A2CP12026?COUGARPAK?放大器
定華雷達(dá)儀表學(xué)堂:如何判斷雷達(dá)物位計(jì)正常工作?
定華雷達(dá)儀表學(xué)堂:雷達(dá)液位計(jì)的影響因素與適用場(chǎng)合有哪些?
雷達(dá)感應(yīng)方案在照明行業(yè)的應(yīng)用

相控陣雷達(dá)電源芯片詳解
汽車雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
定華雷達(dá)儀表學(xué)堂:雷達(dá)物位計(jì)在測(cè)量過(guò)程中出現(xiàn)幾種干擾源
物聯(lián)網(wǎng)系統(tǒng)中的高精度測(cè)距方案_單點(diǎn)TOF激光雷達(dá)

毫米波雷達(dá)傳感器:物體與距離間的關(guān)系

定華雷達(dá)儀表學(xué)堂:如何判斷雷達(dá)物位計(jì)正常工作
激光雷達(dá)與毫米波雷達(dá)的優(yōu)缺點(diǎn)是什么
雷達(dá)水位計(jì)(雷達(dá)液位計(jì))在河道中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論