 其域創新手持激光雷達/手持SLAM三維重建設備亮相深圳
其域創新手持激光雷達/手持SLAM三維重建設備亮相深圳

10月30日,第6個“深圳人才日”即將到來之際,其域創新亮相“南山人工智能人才發展論壇”產品供需對接展,并在新品發布會期間展示手持三維實景實時重建設備——靈光Lixel L1,以及三維重建后的深愛人才館,受到參會領導、媒體及市民觀眾的廣泛關注。
本次“南山人工智能人才發展論壇”由深圳市委組織部(市人才工作局)指導,南山區委組織部(區人才工作局)主辦,邀請了市、區領導,人工智能領域專家人才,市區高層次人才代表,高校院所和重點企業代表等約100人出席。
應論壇邀請,其域創新對深圳市人才公園進行了三維掃描與重建。參觀公司展臺期間,市領導詳細詢問了其域創新的發展現狀,深入了解了產品配置、參數、性能等具體情況,并肯定了靈光Lixel L1在市政、城管、公安等領域的應用前景。
作為扎根深圳南山的創新型企業,其域創新專注于三維技術研發和服務提供,堅持自主可控、軟硬一體的技術方案,助力建筑、影視、娛樂、游戲、智能制造、數字孿生等領域的3D內容快速生成與應用。
目前,其域創新正在通過提供三維技術服務,參與各地數字新基建建設,推動三維化、虛擬現實等技術與重要領域的產業融合和規模化應用,服務經濟社會高質量發展。
未來,其域創新將繼續立足南山,踔厲奮發、篤行不怠,持續引進高端科技人才,主動融入南山區建成世界級創新型濱海中心城區、勇當深圳建設中國特色社會主義先行示范區標桿的發展大局,為南山發展、深圳發展貢獻中國原創科技力量。
*三維重建在數字城市場景下應用空間巨大。通過對實景三維重建技術的應用,實現城市大數據整體、個別建筑或物件的三維實物模型可視化,可以為城市信息管理系統及智慧城市解決方案上層應用提供實景三維底圖平臺。尤其是其域創新提供i的實時三維重建,在應急管理、地災調查、消防救援等方面作用突出。
手持SLAM、移動激光掃描系統主要由激光掃描儀、慣性導航系統及相機組成,用于測量點的三維坐標和激光反射強度,相機用于測量點的三維坐標和顏色信息。根據移動激光掃描系統和數碼相機采集的數據可以得到點云數據,包括三維坐標、激光反射強度、顏色信息。
Simultaneous Localization And Mapping,簡稱SLAM,通過對各種傳感器數據進行采集和計算,生成對其自身位置姿態的定位和場景地圖信息的系統。目前SLAM主要的兩種形式是:基于激光雷達的SLAM(激光SLAM)和基于視覺的SLAM(Visual SLAM或VSLAM)。
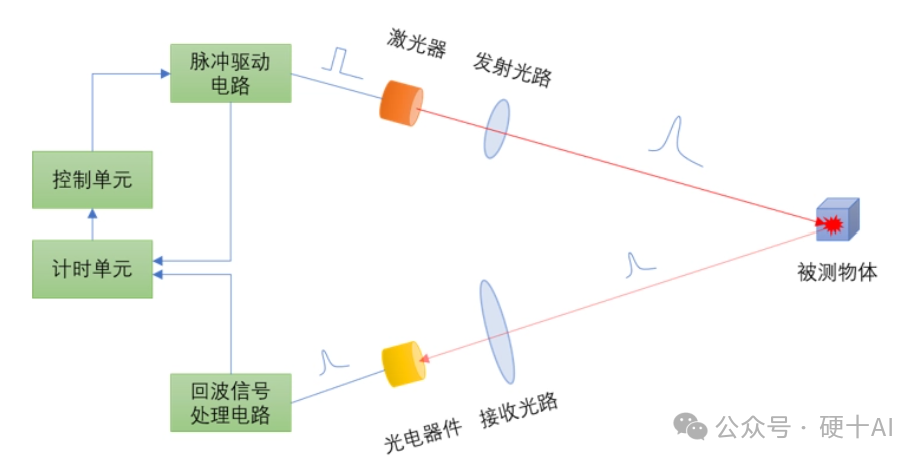
手持激光雷達、手持SLAM設備的工作原理與雷達非常相近,以激光作為信號源,由激光器發射出的脈沖激光,打到周圍障礙物上,引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理計算,就得到從激光雷達到目標點的距離,脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,就可得到精確的三維立體圖像。激光雷達采集到的物體信息呈現出一系列分散的、具有準確角度和距離信息的點,被稱為點云。通常,激光SLAM系統通過對不同時刻兩片點云的匹配與比對,計算激光雷達相對運動的距離和姿態的改變,也就完成了自身的定位。激光雷達距離測量比較準確,誤差模型簡單,在強光直射以外的環境中運行穩定,點云的處理也比較容易。同時,點云信息本身包含直接的幾何關系,使測量和計算變得直觀簡單。
審核編輯黃昊宇
-
激光
+關注
關注
20文章
3468瀏覽量
67207 -
雷達
+關注
關注
50文章
3119瀏覽量
120115
發布評論請先 登錄
全固態激光雷達為什么遲遲未來?其技術難點是什么?
航天宏圖全棧式3DGS實景三維重建系統解決方案

激光三維掃描技術:無噴粉條件下高反光表面三維重建的光學原理與應用
非接觸式激光三維掃描應對鏡面反射表面的無噴粉測量方案:原理與創新

超酷的樹莓派激光雷達掃描儀!

激光雷達技術:自動駕駛的應用與發展趨勢

使用DLP LightCrafter4500投影結構光進行三維重建遇到的疑問求解
三維測量在醫療領域的應用
思看科技手持三維激光掃描儀三種工作模式介紹

激光雷達在SLAM算法中的應用綜述

激光雷達的工作原理和分類





 工商網監
工商網監
評論