 拆卸KUKA機器人2軸平衡配重步驟
拆卸KUKA機器人2軸平衡配重步驟
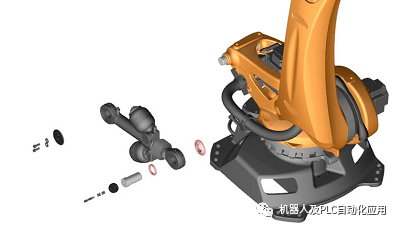
沿正向移動機器人,使間隔塊落位于活塞桿上。
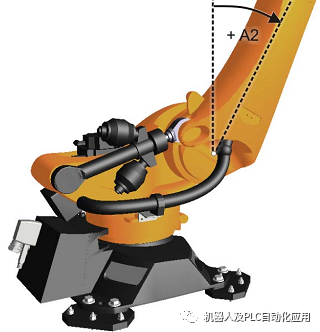
2. 將間隔塊置于魚眼接頭與液壓缸之間敞露的活塞桿上,為此,將橡膠波紋管往后推。
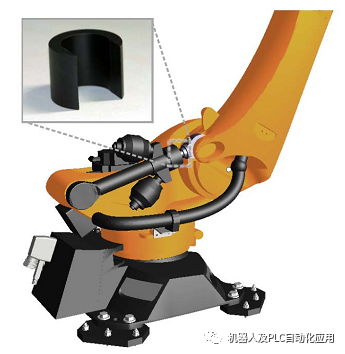
3. 將大臂小心地往負向移動,直到間隔塊直著固定好。
4. 用合適的設備 (如起重機)固定平衡配重。
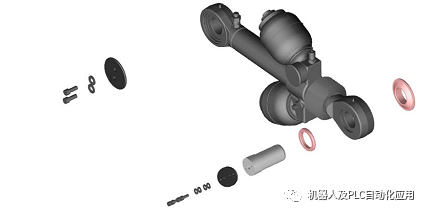
5. 擰出四個內六角螺栓及碟形墊圈,并取下止動墊圈。使用拔銷器,將螺栓從大臂中拔出.
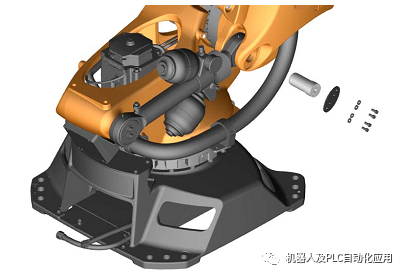
6. 旋出兩個內六角螺栓及止動墊圈,取下旋轉機體蓋板,小心地從旋轉機體的螺栓上取下平衡配重。
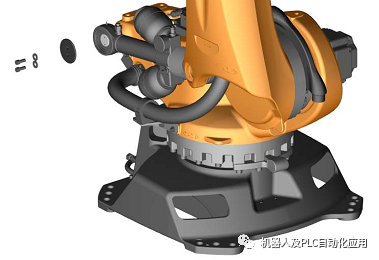
7. 將平衡配重往上抬起。其間取下止推墊圈和定距環。
8. 將平衡配重放在一塊合適的墊子上。
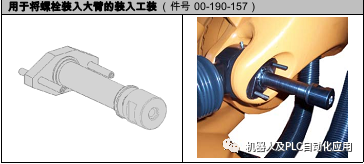
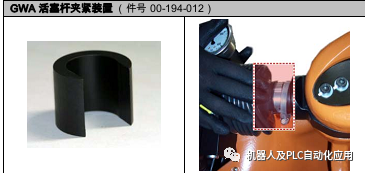
所需的專用工具:
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29463瀏覽量
211520
原文標題:拆卸KUKA機器人2軸平衡配重
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
工業機器人的末端關節旋轉該精確控制?
的布局如下: 傳統機器人KR對于KR系列這一類的傳統機器人來講,末端的布局一般按照滿足“三軸軸線交于一點”的基本原則來做,主要區別在于三個電機的布置和傳動方式。KUKA之前的很多
發表于 11-01 11:08
KUKA機器人問題解答
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
發表于 07-15 07:48
庫卡KUKA機器人四種啟動方式介紹
機器人先到達BCO安全參考的,然后在按下啟動按鈕,機器人就可以正常運行程序。 (2)操作步驟 A:編寫程序并且調試程序等; B:手動狀態選擇需要運行的程序; C:手動狀態時候上電運行程
發表于 09-04 15:45
KUKA庫卡機器人伺服驅動器相關型號舉例
KUKA庫卡機器人伺服驅動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應用于工業機器人及數控加工中心等自動化設備中。是用來控制伺服電機的一種控制器,其作用類似于
發表于 09-08 16:30
KUKA焊接機器人伺服電機常見故障及維修處理
盡可能避免切削液的飛濺。(2)當庫卡機器人伺服電機安裝在齒輪箱上時,加注潤滑油時應注意齒輪箱的潤滑油油面高度必須低于伺服的輸出軸,防止潤滑油滲入電動機內部。(3)固定庫卡機器人伺服電機
發表于 09-26 16:51
庫卡機器人MGV電源模塊維修
KUKA庫卡機器人MGV電源模塊維修PH1013-2840MGV電源維修 庫卡電源模塊維修 機器人電源模塊維修 庫卡控制器維修 KUKA電源維修KU
發表于 09-08 07:30
機器人系統與控制需求簡介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結構本體結構分類:不同機器人建模控制的本質區別關節型機械臂:串聯垂直多關節6軸機器人SCARA機械臂:笛卡爾機械臂
發表于 09-08 07:44
沒有有前輩用LabVIEW控制kuka機器人c2的經驗?通訊是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
發表于 10-21 20:59
ABB機器人6640機器人平衡缸總裝圖及拆卸步驟詳解
的彈簧發出異響 檢查汽缸是否協調 ABB機器人6640機器人平衡缸總裝圖如下: 拆卸前將機器人二軸搖至零位附近,即通過二
KUKA機器人2軸平衡配重拆卸技巧
將大臂小心地往負向移動,直到間隔塊直著固定好。
用合適的設備 (如起重機)固定平衡配重。
擰出四個內六角螺栓及碟形墊圈,并取下止動墊圈。使用拔銷器,將螺栓從大臂中拔出.
發表于 07-25 15:24
?1979次閱讀
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或





 工商網監
工商網監
評論