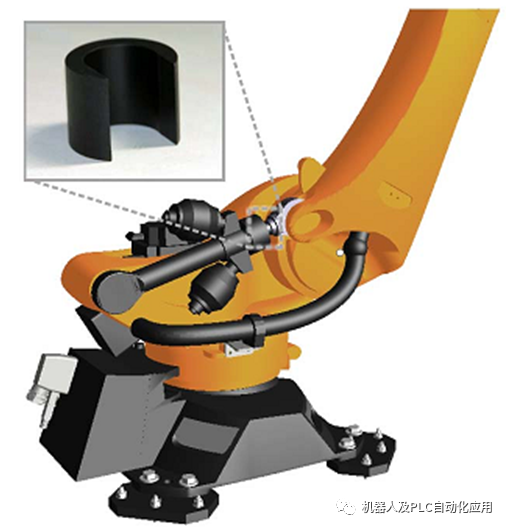
") KUKA C4更換機(jī)器人的2軸平衡缸
KUKA C4更換機(jī)器人的2軸平衡缸
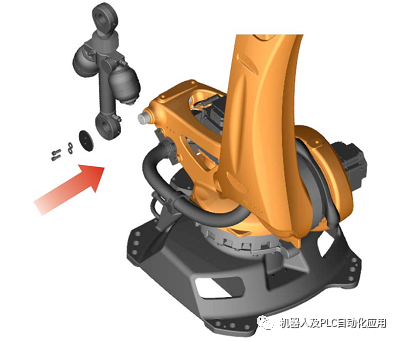
拆卸平衡配重
本節(jié)中介紹(在工作壓力下)拆卸平衡配重方面的工作。
機(jī)器人必須能繞軸 2 運(yùn)動(dòng)。
所需輔助工具
間隔塊,件號(hào):00-194-012
螺栓固定件,件號(hào):00-190-253
M 16 拔銷器,件號(hào):00-131-687
滾動(dòng)軸承潤(rùn)滑脂 LGEP2(400g 筒裝),件號(hào): 00-119-990
掛裝設(shè)備 (滑輪)
在平衡配重處進(jìn)行拆卸和安裝作業(yè)時(shí)有擠傷小臂、手和手指的危險(xiǎn)。請(qǐng)佩戴勞保手套并防止平衡配重墜落和意外運(yùn)動(dòng)。平衡配重約重 40 kg。平衡配重承受著壓力。在該系統(tǒng)進(jìn)行任何作業(yè)時(shí)均須小心謹(jǐn)慎并具有相應(yīng)的知識(shí)。操作不當(dāng)時(shí)有生命危險(xiǎn)。
沿正向移動(dòng)機(jī)器人,使間隔塊落位于活塞桿上。

2.將間隔塊置于魚眼接頭與液壓缸之間敞露的活塞桿上,為此,將橡膠波紋管往后推。


3.將大臂小心地往負(fù)向移動(dòng),直到間隔塊直著固定好。
4.用合適的設(shè)備 (如起重機(jī))固定平衡配重。
5.擰出四個(gè)內(nèi)六角螺栓及碟形墊圈,并取下止動(dòng)墊圈。 使用拔銷器,將螺栓
從大臂中拔出,然后小心地將大臂沿正向移動(dòng)。
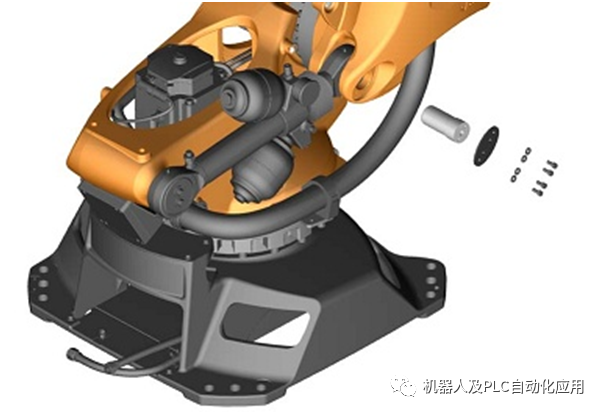
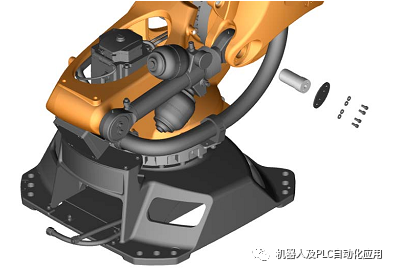
6. 旋出兩個(gè)內(nèi)六角螺栓及止動(dòng)墊圈,取下旋轉(zhuǎn)機(jī)體蓋板,小心地從旋轉(zhuǎn)機(jī)體的螺栓上取下平衡配重。
7. 將平衡配重往上抬起。 其間取下止推墊圈和定距環(huán)。
8. 將平衡配重放在一塊合適的墊子上。

安裝平衡配重
操作步驟 1. 用合適的設(shè)備固定大臂,然后運(yùn)送到安裝地點(diǎn)。
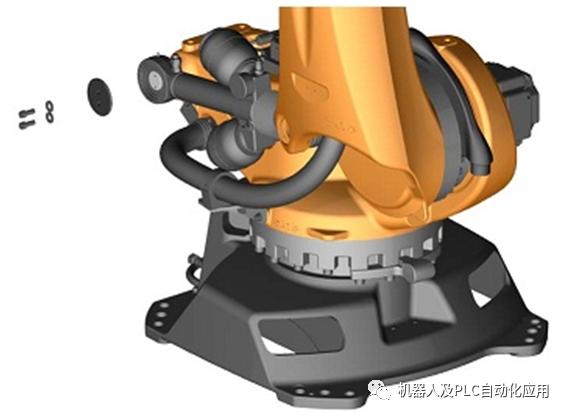
2. 將平衡配重從側(cè)面套到插在旋轉(zhuǎn)機(jī)體中的螺栓上并校準(zhǔn)。
將平衡配重 (GWA) 安裝到旋轉(zhuǎn)機(jī)體上
3. 裝上蓋板,并用兩個(gè)內(nèi)六角螺栓 M12 x 30 / 10.9 和碟形墊圈固定。 (轉(zhuǎn)
矩:104 Nm)
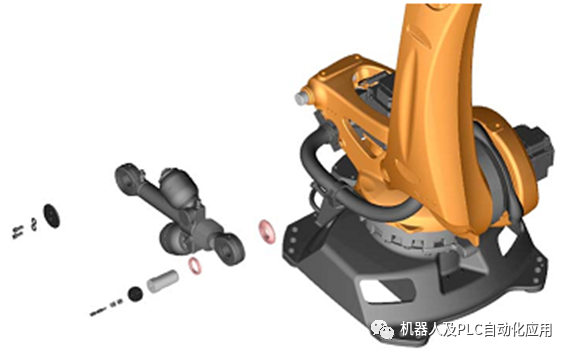
4. 為了將階梯螺栓插入大臂,鉆孔必須對(duì)齊。為此:
? 移動(dòng)大臂,直到可將平衡配重裝入大臂中。
? 降下平衡配重
? 將魚眼接頭連同止推墊圈和定距環(huán)一起插入大臂并對(duì)齊
5. 使用下列特殊工具插入螺栓:用于將螺栓裝入大臂的裝入工裝
6. 套上止動(dòng)墊圈,并用四個(gè)內(nèi)六角螺栓 M8 x 20 / 10.9 和碟形墊圈固定。(擰緊扭矩 = 31Nm)
7. 沿正向移動(dòng)大臂,直到間隔套筒可自由活動(dòng),隨后取下間隔套筒。

8. 檢查平衡配重的工作壓力。
所使用的專用工具;
GWA 活塞桿夾緊裝置

用于將螺栓從大臂中取出的拔出工裝


防止軸承卡在 (大臂)螺栓上的專用工裝
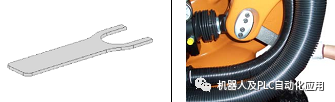
用于將螺栓裝入大臂的裝入工裝

------------------END---------------------
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29504瀏覽量
211614 -
螺栓
+關(guān)注
關(guān)注
0文章
64瀏覽量
9698 -
KUKA
+關(guān)注
關(guān)注
3文章
218瀏覽量
16898
原文標(biāo)題:KUKA C4更換機(jī)器人的2軸平衡缸
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
KUKA機(jī)器人使用說(shuō)明書
庫(kù)卡KUKA機(jī)器人常見故障維修
KUKA機(jī)器人編程說(shuō)明(英文)
名單公布!【書籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開發(fā)實(shí)踐
伺服電動(dòng)缸在人形機(jī)器人中的應(yīng)用
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
安川工業(yè)機(jī)器人結(jié)構(gòu)

焊接機(jī)器人六個(gè)軸分別是什么作用

Al大模型機(jī)器人
Kuka機(jī)器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論