") 應(yīng)用于地物識(shí)別的改進(jìn)輪轉(zhuǎn)森林算法-萊森光學(xué)
應(yīng)用于地物識(shí)別的改進(jìn)輪轉(zhuǎn)森林算法-萊森光學(xué)
引言
面對(duì)現(xiàn)今用來進(jìn)行地物識(shí)別的遙感數(shù)據(jù)的數(shù)量以及種類越來越多,需要進(jìn)行處理實(shí)際問題也越來越復(fù)雜的情況,單純地對(duì)一種算法進(jìn)行改進(jìn)已經(jīng)不能滿足解決問題的需要,然而集成學(xué)習(xí)方法可以較好地解決該問題。集成學(xué)習(xí)方法按照分類器之間的種類關(guān)系可以分為異態(tài)集成學(xué)習(xí)和同態(tài)集成學(xué)習(xí)兩種。異態(tài)集成學(xué)習(xí)指的是使用各種不同的分類器進(jìn)行集成,它的優(yōu)勢(shì)在于異態(tài)集成學(xué)習(xí)中的某種基本算法會(huì)對(duì)某類特定數(shù)據(jù)樣本比其他的基本算法更為有效,得到的效果也會(huì)更好;同態(tài)集成學(xué)習(xí)是指集成的基分類器都是同一類分類器,只是基分類器之間的參數(shù)有所不同,它針對(duì)各種不同的數(shù)據(jù)類型用抽樣與集成進(jìn)行結(jié)合,對(duì)原始訓(xùn)練集進(jìn)行一系列抽樣,產(chǎn)生多個(gè)分類器,然后用投票或合并的方式輸出最終結(jié)果。
決策樹的研究為這兩種集成方式提供了研究平臺(tái),利用決策樹來進(jìn)行特征提取也是其中的一個(gè)研究方向,然而有學(xué)者提出決策樹在構(gòu)建過程中進(jìn)行特征選擇有不足之處:決策樹中出現(xiàn)的特征是有等級(jí)的,淺節(jié)點(diǎn)的特征明顯要比深節(jié)點(diǎn)處的特征更為重要,如果直接綜合每個(gè)節(jié)點(diǎn)的特征來進(jìn)行特征選擇,就完全忽略了這種等級(jí)特性,有可能使特征子集的潛在作用得不到發(fā)揮。因此如何正確地使用決策樹來進(jìn)行特征選擇也是一個(gè)研究熱點(diǎn),這也是輪轉(zhuǎn)森林(Rot-F)提出的出發(fā)點(diǎn)。輪轉(zhuǎn)森林對(duì)特征進(jìn)行深層劃分,將原特征集隨機(jī)分為多個(gè)小的特征子集,利用PCA(主成分分析)變換得到的系數(shù)對(duì)原數(shù)據(jù)集進(jìn)行改變,以此來建立樹的過程要明顯優(yōu)于普通決策樹在分叉過程中對(duì)原始數(shù)據(jù)的分類性能。然而決策樹對(duì)遙感數(shù)據(jù)的分類往往會(huì)出現(xiàn)過分類的現(xiàn)象,所以考慮將具有自學(xué)習(xí)和自組織能力的徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)(RBFN)與之進(jìn)行結(jié)合,用輪轉(zhuǎn)森林轉(zhuǎn)換各子集后的數(shù)據(jù)樣本作為神經(jīng)網(wǎng)絡(luò)的輸人,對(duì)應(yīng)轉(zhuǎn)換后的樣本類標(biāo)作為網(wǎng)絡(luò)的輸出,以此來構(gòu)造多個(gè)子分類器集。通過將原數(shù)據(jù)集進(jìn)行分化的方法,構(gòu)造多個(gè)內(nèi)部參數(shù)差異較大的同態(tài)集成基分類器,提升總體的分類精度,集成兩種方法的優(yōu)勢(shì)達(dá)到對(duì)遙感地物的識(shí)別更加精確。
Rot-F和RBFNN的集成算法
異不顯著(表2)。對(duì)樹體水勢(shì)的研究結(jié)果表明,3個(gè)地塊中只有8號(hào)地內(nèi)不同生長(zhǎng)勢(shì)植株間有顯著的差異:生長(zhǎng)勢(shì)強(qiáng)的樹中庸樹其樹體水勢(shì)顯著高于弱樹;其他兩塊地樹勢(shì)間無顯著差異。輪轉(zhuǎn)徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)首先是利用輪轉(zhuǎn)森林對(duì)特征集的轉(zhuǎn)換,得到多個(gè)新的特征子集,并將改變后的數(shù)據(jù)用于RBFN的分類過程。對(duì)原始數(shù)據(jù)集的處理過程如下:將原始數(shù)據(jù)按照特征集隨機(jī)分為多個(gè)小的特征子集數(shù)據(jù)塊,之后在每個(gè)特征子集的數(shù)據(jù)塊中依據(jù)數(shù)據(jù)實(shí)例進(jìn)行重采樣,將重采樣后的數(shù)據(jù)小塊進(jìn)行主成分分析,使得到的各特征值的重要性程度系數(shù)與原數(shù)據(jù)集進(jìn)行相應(yīng)的乘積變動(dòng)。因采樣過程得到的數(shù)據(jù)塊要小于原始數(shù)據(jù)塊,所以得到特征集的大小也就不同,以新特征集作為各個(gè)RBFN基分類器的輸人來訓(xùn)練模型和預(yù)測(cè)數(shù)據(jù)。
為了利用訓(xùn)練樣本集來構(gòu)建這些子分類器,需要進(jìn)行以下幾個(gè)步驟:
1)隨機(jī)的將F分為K個(gè)子集,這些子集可能是相對(duì)獨(dú)立的,也有可能是相互交叉重復(fù)的。為了最大可能地增加多樣性,選用相對(duì)獨(dú)立的特征子集。同時(shí)為簡(jiǎn)化計(jì)算,假定K是一個(gè)可調(diào)的變量,那么對(duì)于每個(gè)特征子集所包含的特征個(gè)數(shù)為M=n/K。
2)定義Fi,j為Di個(gè)子分類器用來進(jìn)行訓(xùn)練的第j個(gè)特征子集。利用Botstrap進(jìn)行隨機(jī)抽樣選取一組數(shù)據(jù)樣本,抽樣的比例為該子集數(shù)據(jù)的75%。僅利用Fi,j中的M個(gè)特征進(jìn)行PCA變換,將得到的主成分系數(shù)進(jìn)行存儲(chǔ),每個(gè)系數(shù)的維數(shù)為M×1。對(duì)于上述的矩陣,得到的特征值有可能是0,所以可能得不到所有的M個(gè)向量,即Mj≤M。因此通過在這些子集中運(yùn)用PCA技術(shù)而不是在所有的數(shù)據(jù)集中應(yīng)用,其目的就是為了避免在不同的子分類器中對(duì)于相似特征子集產(chǎn)生類似的系數(shù)。
3)將所獲得的帶有主成分系數(shù)的向量進(jìn)行綜合,構(gòu)造一個(gè)具有稀疏性的輪轉(zhuǎn)矩陣Ai,
4)用來進(jìn)行訓(xùn)練Di個(gè)子分類器的訓(xùn)練數(shù)據(jù)集為XAi*,將這樣的訓(xùn)練集作為輸人對(duì)RBFN進(jìn)行訓(xùn)練來建立神經(jīng)網(wǎng)絡(luò)模型,訓(xùn)練部分分為兩個(gè)階段:
(1)訓(xùn)練輸人層和隱含層之間的徑向基函數(shù),即確定基函數(shù)的中心和方差。隱含層的徑向基函數(shù)有多種形式,最常用的是高斯函數(shù)。
(2)訓(xùn)練隱含層和輸出層之間的線性權(quán)值。通過采樣和樣本聚類生成RBFN的中間節(jié)點(diǎn)參數(shù),中間層狀態(tài)確定法選用K-means聚類,該方法采用最小平方誤差和作為分類準(zhǔn)則,通過迭代獲得聚類中心點(diǎn)集,即中間層的狀態(tài),節(jié)點(diǎn)個(gè)數(shù)等于聚類數(shù)。
3)該集成模型解決的是一個(gè)c類的模式分類問題,集成的規(guī)模為P(即有P個(gè)子分類器)通過期望的輸人輸出編碼映射關(guān)系對(duì)P個(gè)成員網(wǎng)絡(luò)進(jìn)行訓(xùn)練。
數(shù)據(jù)的選取及實(shí)驗(yàn)結(jié)果分析
實(shí)驗(yàn)區(qū)采用扎龍濕地,它位于黑龍江省西部,烏裕河下游齊齊哈爾市及富裕、林甸、杜蒙、泰來縣交界地域。扎龍濕地保護(hù)區(qū)是以蘆葦沼澤為主的內(nèi)陸濕地和水域生態(tài)系統(tǒng)。它是中國(guó)北部最完整、最原始和廣闊的濕地生態(tài)系統(tǒng),已被列人國(guó)際重要濕地名錄。該地區(qū)地物類型主要包括鹽堿地、草地(包括蘆葦)、水體、沼澤(輕度和重度沼澤歸為一類)這些具有比較代表性的類物。選用的遙感圖像為2001-10-05獲取的xandsatETMI圖像,圖像大小為500X500像素,待分類圖像采用TM影像7個(gè)波段中的3、2、1共3個(gè)波段的真彩色合成圖像,如圖1所示。
圖 1 研究區(qū)域影像
經(jīng)目視判讀,結(jié)合土地利用現(xiàn)狀圖,確定濕地影像區(qū)域內(nèi)主要包括六大類地物:鹽堿地、草地、水域、沼澤地、受火區(qū)域以及農(nóng)用地(包括農(nóng)用耕地和農(nóng)用居住地)。
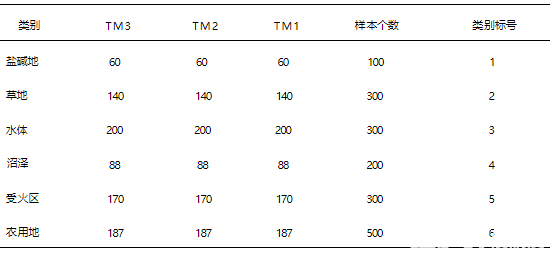
xandsatTM+ETMI影像的3、2、1波段組合能較好地反映土地植被特征。根據(jù)目視判讀結(jié)果,并且結(jié)合土地利用現(xiàn)狀圖和2003年5月/11月的實(shí)地調(diào)查資料,在真彩色合成影像上共選取1700個(gè)樣本點(diǎn),其中1020個(gè)像素點(diǎn)作為輪轉(zhuǎn)神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本,340個(gè)像素點(diǎn)作為校驗(yàn)樣本,剩余的340個(gè)用來測(cè)試分類精度.為進(jìn)一步減小輸人數(shù)據(jù)的不同所造成不同算法之間的差異性,將所有的原始輸人數(shù)據(jù)都?xì)w一化到[-1,1]之間,具體結(jié)果如下表1所示。分別應(yīng)用樸素貝葉斯(NB)方法、傳統(tǒng)徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)方法(RBFN)、普通輪轉(zhuǎn)森林方法(RotationForest)方法、文獻(xiàn)中的方法(Rot-Bost)、隨機(jī)森林方法(RandomForest)以及本文方法(Rot-RBFN)對(duì)所選的區(qū)域ETMI遙感影像進(jìn)行分類,分類結(jié)果如圖2。對(duì)應(yīng)每個(gè)類標(biāo)的分類結(jié)果量化后如表2所示.由表2和圖2的6幅分類效果圖可以看出隨機(jī)森林算法對(duì)水體的分類精度要高,但是對(duì)于訓(xùn)練樣本較少的鹽堿地和草地以及農(nóng)用地等分類,精度要低于本文方法,本文方法的精度分別達(dá)到了0.917,0.6,0.795。而且從圖中可以看出采用決策樹作為基分類器的分類方法中出現(xiàn)了過分類現(xiàn)象,所以有較多的斑點(diǎn)出現(xiàn),文獻(xiàn)中的方法雖然在農(nóng)用地的精度上要略高一些,但是對(duì)于其他幾類地物出現(xiàn)了明顯分辨不出的情況。此外,從圖2可以看出,本文方法雖沒有NB方法看起來清晰、明亮,但從精度上卻明顯優(yōu)于NB算法。
表 1波段值和總體樣本數(shù)目
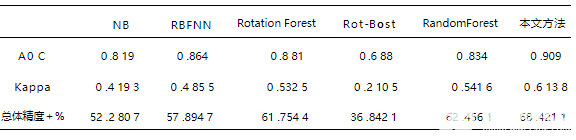
將上述結(jié)果采用R-C曲線下面積(A0C)的大小以及用誤差矩陣的主要參考指標(biāo)總體精度和Kappa系數(shù)來進(jìn)行評(píng)估。其中Kappa系數(shù)是綜合整個(gè)誤差矩陣的信息提出的一個(gè)精度表達(dá)系數(shù),可以比較不同分類器的誤差矩陣在精度上的差異,得到的結(jié)果如表4所示。從表3結(jié)果可以看出,本文方法在A0C、Kappa系數(shù)和總體精度上都比其他幾種算法高,分別達(dá)到了0.909,0.6138和68.4211,相比于其他5種常用的算法,本文方法效果更好。A0C值越大說明該分類器的分類結(jié)果越靠近于R-C坐標(biāo)的縱軸,對(duì)應(yīng)分類器的分類效果和泛化性能也就越好;Kappa系數(shù)越高則說明對(duì)應(yīng)該算法的過度擬合情況越小,也就從側(cè)面說明該分類器所建模型的泛化能力越強(qiáng)。而總體精度則從準(zhǔn)確率方面說明所提方法的有效性更強(qiáng)。從上述3個(gè)方面來說,本文方法更能給出較高的分類精度和較好的泛化性能。從算法耗時(shí)來講,本文方法耗時(shí)稍微較長(zhǎng)一些,達(dá)到24.21s。而其他幾種算法的耗時(shí)基本在10s左右。
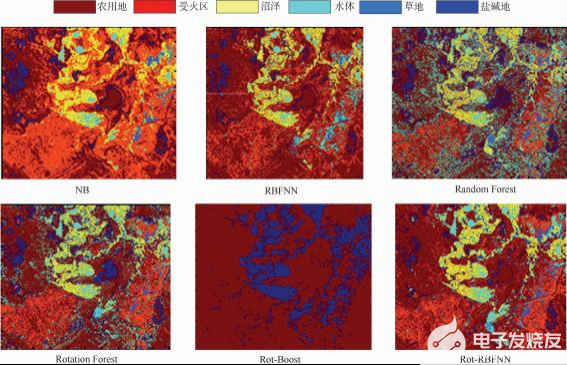
圖2 不同分類器的分類結(jié)果
總結(jié)
應(yīng)用遙感技術(shù)測(cè)定NDVI能快速評(píng)價(jià)葡萄生長(zhǎng)勢(shì)的差異,為確定與之相適應(yīng)的栽培管理技術(shù)決策提供依據(jù),其結(jié)果數(shù)據(jù)可以更好地與越來越廣泛的機(jī)械化操作相適應(yīng),從而提高釀酒葡萄原料質(zhì)量均一性,保證獲得高品質(zhì)的葡萄酒。這一技術(shù)在未來葡萄生產(chǎn)中使用具有廣闊的前景。
表2 不同校驗(yàn)樣本的生產(chǎn)者精度對(duì)比表
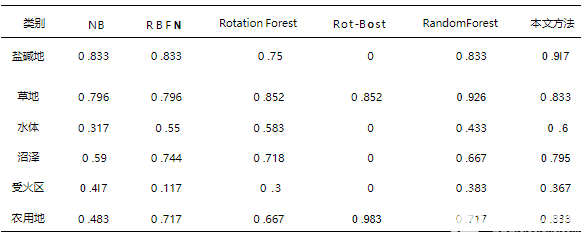
表3 不同算法下評(píng)價(jià)指標(biāo)結(jié)果比較
歡迎關(guān)注公眾號(hào):萊森光學(xué),了解更多光譜知識(shí)。
萊森光學(xué)(深圳)有限公司是一家提供光機(jī)電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應(yīng)用系統(tǒng)的研發(fā)、生產(chǎn)和銷售。
審核編輯黃昊宇
-
高光譜
+關(guān)注
關(guān)注
0文章
405瀏覽量
10219
發(fā)布評(píng)論請(qǐng)先 登錄
地物光譜儀+林地調(diào)查,精準(zhǔn)掌握森林生長(zhǎng)與病變數(shù)據(jù)

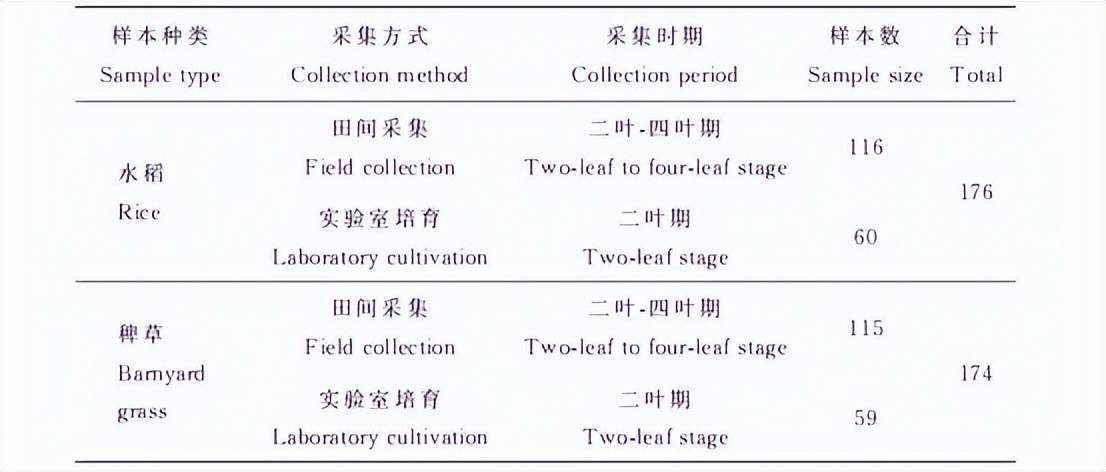
基于地物光譜儀的稻田秧苗及稗草的早期識(shí)別
尼得科旗下利萊森瑪電機(jī)科技(福州)首臺(tái)國(guó)產(chǎn)1E級(jí)發(fā)電機(jī)成功下線
ASR與傳統(tǒng)語音識(shí)別的區(qū)別
基于改進(jìn)ResNet50網(wǎng)絡(luò)的自動(dòng)駕駛場(chǎng)景天氣識(shí)別算法

地物光譜儀在森林樹冠研究中的具體應(yīng)用
光學(xué)識(shí)別的過程包含哪些
光學(xué)識(shí)別輸入的基本原理是什么
深度識(shí)別算法包括哪些內(nèi)容
地物光譜儀如何助力森林樹冠研究?
地物光譜儀是測(cè)什么的






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論