") 機器人通過外部零點標定進行零點復歸測試
機器人通過外部零點標定進行零點復歸測試
KSS15066
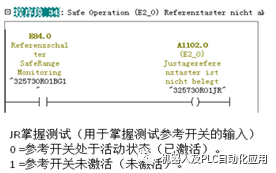
調零開關處電平出乎意料地低
原因: 參考點開關臟污
解決方案: 清潔參考點開關
如未進行零點復歸測試,參考點開關至少被觸發(fā) 5 分鐘,因參考點開關的接近開關表面臟污,例如金屬粉塵或焊渣。
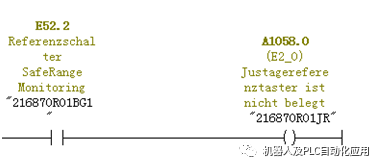
原因: 零點復歸測試的輸入端配置錯誤
解決方案: 更改安全配置
原因: 參考點組未示教
解決方案: 示教參考點組
參考點組未示教。必須針對參考點組示教下列點:
? 運動至參考點開關
? 參考位置
? 離開參考點開關
原因: 參考點開關安裝錯誤或移位
解決方案: 重新安裝或校準參考點開關
未進行零點復歸測試,參考點開關被觸發(fā)至少 5 分鐘。參考點開關安裝在錯誤的位置上或被移動。
1. 接近參考點位置。
2. 檢查參考點開關的兩個接近開關表面是否被按鍵觸發(fā)(觸發(fā)板或工具)。
安裝并調整參考點開關,使機器人到參考點位置時同時觸發(fā)參考點開關的兩個接近開關表面。
原因: 參考點開關損壞
解決方案: 更換參考點開關
未進行零點復歸測試,參考點開關被觸發(fā)至少 5 分鐘。參考點開關損壞。
相關變量:
$MasteringTest_Switch_OK
檢查參考開關的功能
TRUE =參考開關正常。
FALSE =參考開關故障。
默認值:TRUE
掌握測試的狀態(tài)
TRUE =參考測試處于活動狀態(tài)。
FALSE =沒有參考測試處于活動狀態(tài)。
$MasteringTest_Group
參考組號當前在參考位置
0:參考位置中沒有參考組
1 ... 3:該編號在參考位置的參考組
VASS標準的KUKA安全機器人安全歸零程序:
開始安全尋參
LIN VB=200[mm/s] VE=0% ACC=100% RobWzg=5 Base=0 SPSTrig=0[1/100s] P
......
4: Tech_ SafeRobot JustageschalterGruppe 1 aktivieren EIN開始安全尋參
......
VW_USR_R (#USR_ADV,109,31,1,1,1,1,1,TRUE)
結束安全尋參
LIN VB=200[mm/s] VE=0% ACC=100% RobWzg=5 Base=0 SPSTrig=0[1/100s] P
......
3: Tech_ SafeRobot Justageschalter deaktivieren EIN結束安全尋參
VW_USR_R (#USR_ADV,109,34,1,1,1,1,1,TRUE)
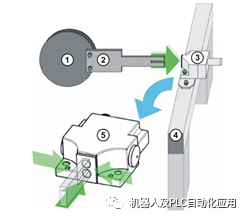
參考點位置必須根據(jù)以下標準進行選擇:
? 參考點開關的位置和觸發(fā)板不會妨礙機器人的工作。
? 軸在參考點位置處不得彼此位于奇點內。
? 參考點開關的兩個接近開關表面在參考點位置處由觸發(fā)面觸發(fā)(觸發(fā)板或工具)。
? 同一個參考點組中的所有軸位于參考點位置,以便觸發(fā)參考點開關。
? 機器人軸在參考點位置處距零點標定位置至少有 ±5°(旋轉軸)或±15 mm(線性軸)。
? 參考點開關的位置位于機器人運動范圍內。
在參考點位置與參考點開關的間距最大允許為 2 mm。若間距更大,則參考點開關不會觸發(fā)。
通過外部零點標定進行零點復歸測試
如果已配置通過外部零點標定進行零點復歸測試,則無法使用安全配置中保存的參考點位置驗證零點標定。沒有用于執(zhí)行零點復歸測試的 KRL 程序。
系統(tǒng)集成商必須檢查本身作為安全功能組成部分的上級控制系統(tǒng)中的零點標定,并通過機器人控制系統(tǒng)的安全輸入信號確認已成功執(zhí)行的零點復歸測試。
為了通過上級控制系統(tǒng)進行外部零點標定確認,配置了安全輸入端 EJB(外部零點標定確認)。通過以下接口可提供 EJB 信號:
? 以太網(wǎng)安全接口
? 可與安全接口 X13 組合使用的接口 X42
如要確認零點標定,必須在輸入端 EJB 上生成一個正脈沖。脈沖必須至少為350 ms 長,允許最長為 5 s。當 EJB 信號從“邏輯 0”切換為“邏輯1”,并且在該時間段內重新切換回“邏輯 0”時,零點復歸測試已成功確認。
是否需要確認零點標定,可由上級控制系統(tǒng)通過安全輸出信號 RR(機器人已回參考點)和 SO(安全選項已激活)確定。
如果安全輸出端 RR 為“邏輯 0”,則需要確認零點標定。然而,輸出端 RR在以下情況下也為“邏輯 0”:
? 機器人控制系統(tǒng)已關閉或尚未完全啟動(準備就緒)。
? 安全選項未激活,因為安全監(jiān)控已關閉。
建議另外測試安全輸出端 SO(安全選項已激活)。在使用以太網(wǎng)安全接口時,也可以測試安全輸出信號 PSA(安全接口已激活)。如果安全輸出端 SO或 PSA 為“邏輯 1”,則安全輸出端 RR 的狀態(tài)也有效。
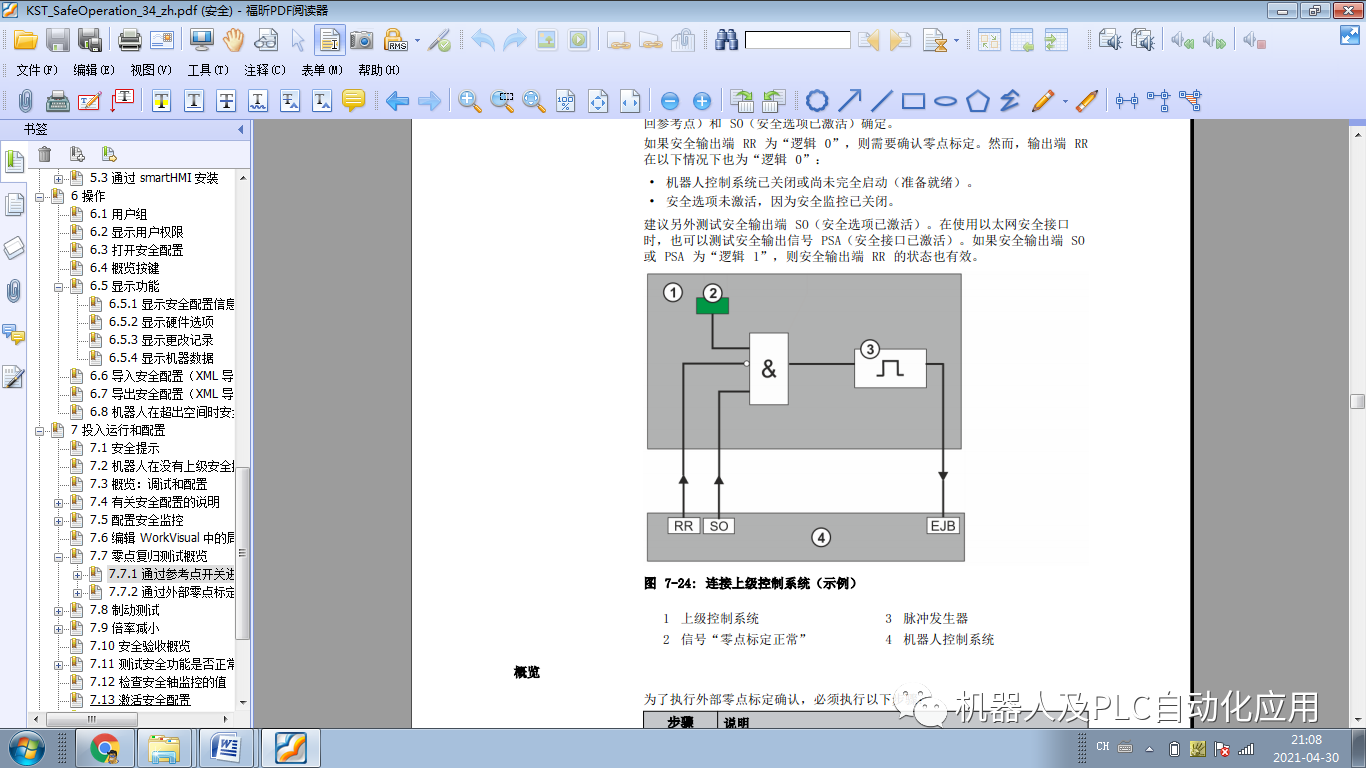
1 上級控制系統(tǒng)
2 信號“零點標定正常”
3 脈沖發(fā)生器
4 機器人控制系統(tǒng)
為了執(zhí)行外部零點標定確認,必須執(zhí)行以下步驟:
1 定義參考點位置并將其保存在上級控制系統(tǒng)中。
2 在機器人控制系統(tǒng)要求進行零點復歸測試時駛至參考點位置(通過一個需要單獨編制的 KRL 程序)。
3 將機器人和附加軸的實際位置與上級控制系統(tǒng)中保存的參考點位置作比較并檢查位置是否一致。
4 如果位置調整成功,則通過上級控制系統(tǒng)確認零點復歸測試:將安全輸入端 EJB 上的確認脈沖發(fā)送至機器人控制系統(tǒng)。
5 如果位置調整失敗,則機器人不得繼續(xù)移動:在機器人控制系統(tǒng)方面通過上級控制系統(tǒng)采取合適的措施,例如撤銷運行許可。
外部零點標定確認的信號波形:
顯示的信號波形針對以下情況:
? 安全輸出信號 RR 由上級控制系統(tǒng)進行評估。
? 機器人口控制系統(tǒng)要求零點復歸測試。信號 RR 從“邏輯 1”切換至“邏輯 0”。
? 上級控制系統(tǒng)通過 EJB 脈沖信號確認已成功執(zhí)行的零點復歸測試。
? 信號 RR 從“邏輯 0”切換至“邏輯 1”。顯示信息 零點復歸測試已成功完成。
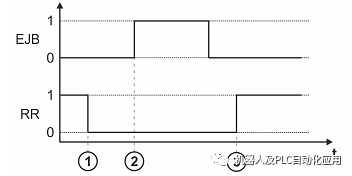
1 要求零點復歸測試。
2 外部零點標定確認開始。
3 已確認零點復歸測試成功執(zhí)行。
審核編輯:劉清
-
機器人
+關注
關注
213文章
29446瀏覽量
211399 -
ejb
+關注
關注
0文章
6瀏覽量
6813 -
ACC
+關注
關注
1文章
59瀏覽量
23027
原文標題:機器人安全監(jiān)控-調零開關處電平出乎意料地低
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論