 玩轉OpenHarmony PID:教你打造兩輪平衡車
玩轉OpenHarmony PID:教你打造兩輪平衡車
點擊藍字 ╳ 關注我們

王維平
OpenHarmony知識體系工作組
簡介




硬件配置資源
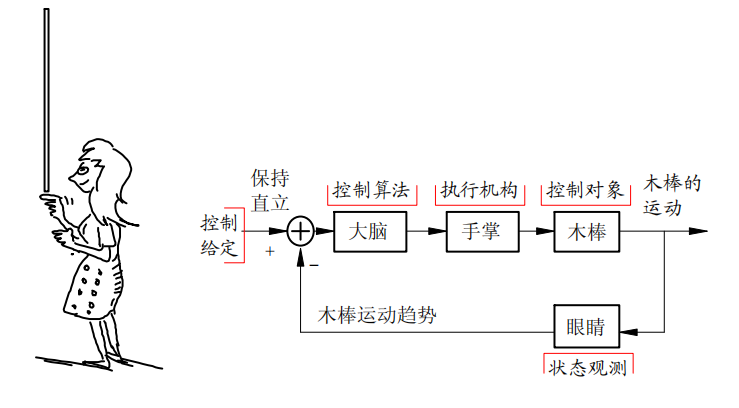
原理概括

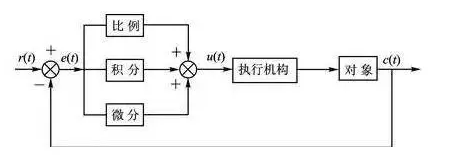
PID算法介紹

兩步搭建樣例工程


關鍵算法講解


float g_middleAngle = 1.0;//平衡角度
float g_kpBalance = -85800.0;
float g_kdBalance = -400;
static int ControlBalance(float angle, short gyro)
{
int outpwm = 0;
float angleBias = 0.0;
float gyroBias = 0.0;
float tempAngle = 0.0;
float tempGyro = 0.0;
tempAngle = 0 - angle;//極性控制
tempGyro = 0 - gyro;
angleBias = g_middleAngle - tempAngle;
gyroBias = 0 - tempGyro;
outpwm = (g_kpBalance / 100 * angleBias + g_kdBalance
* gyroBias / 100);
return outpwm;
}float g_kpSpeed = 95800.0;
float g_kiSpeed = 200;
static int ControlSpeed(long int left, long int right)
{
int outpwm = 0;
int speedBias = 0;
int speedBiasLowpass = 0;
static int speed_i = 0;
float a = 0.68;
static int speedBiasLast = 0;
speedBias = 0 - left - right;
speedBiasLowpass = (1 - a) * speedBias
+ a * speedBiasLast;
speedBiasLast = speedBiasLowpass;
speed_i += speedBiasLowpass;
speed_i = limit_data(speed_i, SPEED_H, SPEED_L);
outpwm = (g_kpSpeed * speedBiasLowpass / 100 +
gkiSpeed * speed_i / 100);
return outpwm;
}static int ControlTurn(short gyro)
{
int outpwm;
outpwm = g_kpTurn * gyro;
return outpwm;
}總結
相關鏈接
https://gitee.com/openharmony/docs/blob/master/zh-cn/release-notes/OpenHarmony-v3.2-beta1.md
https://gitee.com/openharmony-sig/vendor_oh_fun
https://gitee.com/bearpi/bearpi-hm_nano/tree/master/applications/BearPi/BearPi-HM_Nano/docs/quick-start
https://gitee.com/openharmony-sig/knowledge/blob/master/docs/co-construct_demos/README_zh.md
https://growing.openharmony.cn/mainPlay/learnPathMaps?id=19
https://gitee.com/openharmony-sig/knowledge_demo_smart_home
原文標題:玩轉OpenHarmony PID:教你打造兩輪平衡車
文章出處:【微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
鴻蒙
+關注
關注
59文章
2531瀏覽量
43788 -
OpenHarmony
+關注
關注
27文章
3835瀏覽量
18176
原文標題:玩轉OpenHarmony PID:教你打造兩輪平衡車
文章出處:【微信號:gh_e4f28cfa3159,微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
杰發科技亮相2025年兩輪車智能化技術發展大會
此前,5月9日-10日,由中國電子商會智能電動汽車專委會、國家摩托車檢驗檢測中心(天津)及莆田市荔城區人民政府共同主辦的2025年兩輪車智能化技術發展大會在莆田市舉行。在會議期間舉行的兩輪車
武漢芯源半導體CW32L010在兩輪車儀表的應用介紹
CW32L010憑借其優異的性能、豐富的外設資源和超低功耗特性,為兩輪車儀表盤應用提供了高性價比的解決方案。其寬電壓工作范圍和工業級溫度特性,特別適合車輛電子應用的嚴苛環境。對于想采用CW32L010進行兩輪

武漢芯源半導體CW32L010在兩輪車儀表的應用介紹
隨著兩輪電動車的智能化發展,儀表盤作為人機交互的重要界面,其功能需求日益復雜。武漢芯源半導體的安全低功耗單片機CW32L010憑借其優異的性能和豐富的外設資源,成為兩輪車儀表盤應用的理
發表于 05-13 14:06
杰發科技持續賦能兩輪車智能化升級
作為兩輪車保有量大國,當下我國兩輪車行業正處在智能化變革前夜。2025慕尼黑上海電子展期間,四維圖新旗下杰發科技現場召開兩輪車智能融合儀表芯

兩輪電動車智能藍牙無鑰匙開鎖模組
隨著科技的進步與移動互聯網的普及,傳統的實體車鑰匙正在逐步被智能化的開鎖方式取代。針對兩輪電動車市場,我們推出了全新的智能藍牙鑰匙開鎖解決方案,該解決方案基于最新的BLE5.4藍牙技術,集成了高性能
發表于 03-31 10:49
Microchip推出電動兩輪車生態系統
參考設計方案,可解決電動滑板車和電動自行車開發的關鍵挑戰,包括能效優化、系統集成、安全性和上市時間。通過提供車規級可擴展解決方案,Microchip致力于幫助制造商簡化開發流程,打造功能豐富且可靠的電動兩輪

兩輪車智能化研究:主機廠扎堆進入,兩輪車智能化持續提升
佐思汽研發布《 2024-2025年兩輪車智能化及產業鏈研究報告 》。 本報告聚焦兩輪車的智能化升級,對電動兩輪

九號公司與寶馬集團攜手合作,共創新型電動兩輪車
集團在相關技術領域的專利優勢,結合自身在智能兩輪電動車領域的深厚技術積累和創新實力,共同開發生產具備自主產權的創新型電動兩輪車。這些新型車輛將不僅擁有九號公司一貫的高品質和智能化特點,
Qorvo助力電動兩輪車性能提升
電動兩輪車已經成了中國人的出行神器,輕巧便捷,即停即走,接娃買菜輕松拿捏,讓高油價和停車難不再是事。截至2023年底,中國電動兩輪車市場擁有4.2億輛的保有量,幾乎每四人就有一輛,且市場仍未見頂。據預測,隨著2023年新國標修訂
兩輪電動車系統介紹與THVD8000在兩輪電動車上的應用
電子發燒友網站提供《兩輪電動車系統介紹與THVD8000在兩輪電動車上的應用.pdf》資料免費下載
發表于 09-27 11:12
?0次下載

LTE-CAT1模組在兩輪車電池中的應用
隨著城市交通擁堵問題的加劇和環保意識的提升,兩輪電動車成為越來越多人的首選出行工具。作為其核心部件,電池的性能和安全性直接影響到兩輪電動車的整體使用體驗。為了提升電池管理系統的智能化水
安朔科技ble5.2藍牙模塊+兩輪車藍牙鑰匙方案
在現代生活中,智能科技已深入我們的每一個角落,比如在電動兩輪車領域,傳統鑰匙總是容易遺忘或丟失,給用戶帶來諸多不便,藍牙車鑰匙應運而生,則徹底解決了這一問題。只需在手機上安裝相關應用程序,通過藍牙






 工商網監
工商網監
評論