 補盲激光雷達,角分辨率越小越好嗎?
補盲激光雷達,角分辨率越小越好嗎?
如何簡單地判斷一款補盲激光雷達的成像效果?
業界通常有幾個指標:視場角大小、測距范圍,以及角分辨率。
一款優秀的補盲激光雷達,通俗來說:既要看得廣,還要看得清。
上期我們討論了補盲激光雷達如何看得夠廣的話題(上期:充足的激光雷達視場要多大?補盲激光雷達視場覆蓋大揭秘!),這期我們聊聊補盲激光雷達的另一個關鍵問題——如何“看得夠清”,即角分辨率該如何定義。
1
補盲雷達角分辨率:久經思量的Trade-off
什么是激光雷達角分辨率
如果把激光雷達類比成人眼,那視場大小相當于人眼視野的寬窄,分辨率是決定人眼對圖像細節辨識能力最重要的因素之一。
分辨率在激光雷達領域對應為角分辨率,指的是相鄰兩個激光掃描點之間的角度間隔,一般以度(°)為單位。由于目前激光雷達有很多種掃描方式,每種方式在掃描點分布上的差異,導致掃描點并不絕對均勻,因此這里講的激光雷達角分辨率是一個等效平均的概念。
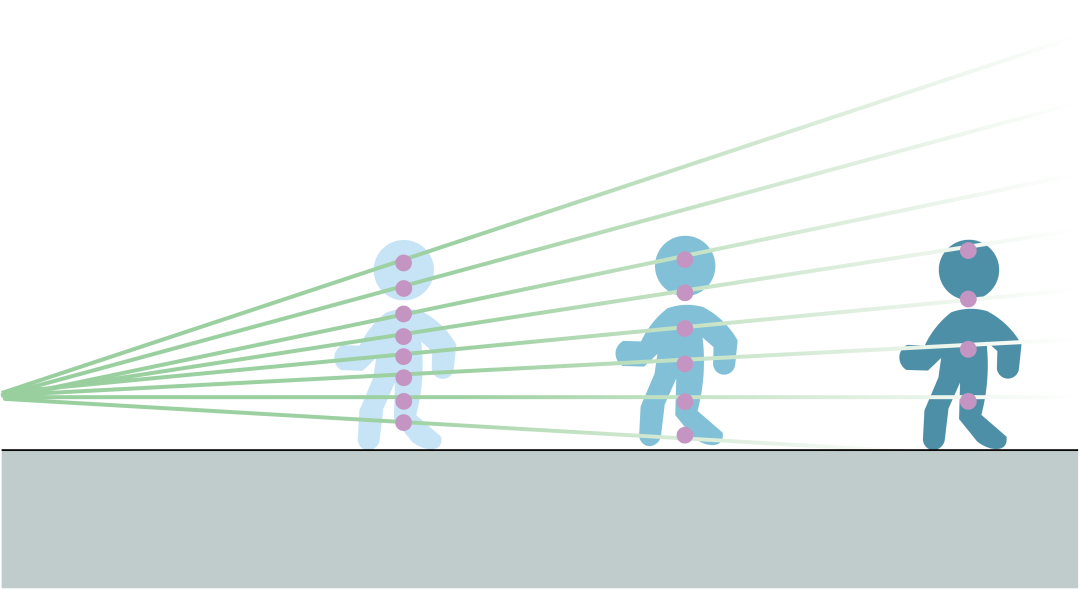
直觀理解,角分辨率越小,單位空間角內分布的激光點數就越多,其對于物體的分辨能力就會越強。相同角分辨率下,對同一物體,距離越遠探測到的激光點數越少,如圖所示。
補盲激光雷達,角分辨率不能太小
激光雷達的角分辨率定義是非常講究的。
相比于長距前向激光雷達,短距補盲激光雷達的分辨率定義更加復雜,考量因素更多。
首先,要確定補盲激光雷達所需覆蓋的感知范圍。
現階段,補盲激光雷達的探測距離范圍一般在25~30米(@10% 朗伯反射,指入射能量在所有方向均勻反射)。
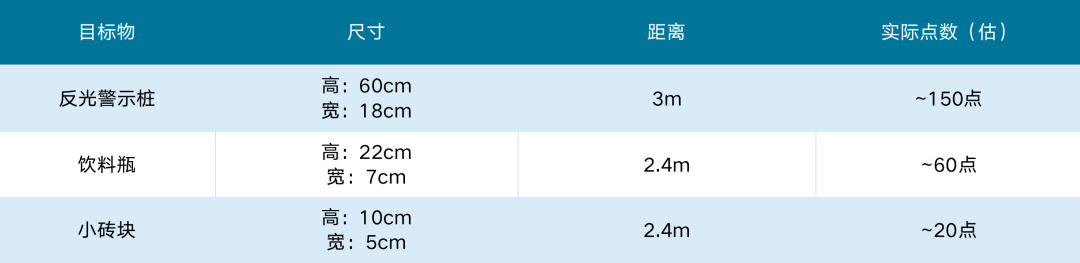
當需求感知距離達到20m(※)時,如果要對典型目標物輸出高置信度的感知結果,粗略估計其平均角分辨率需要達到0.5°。
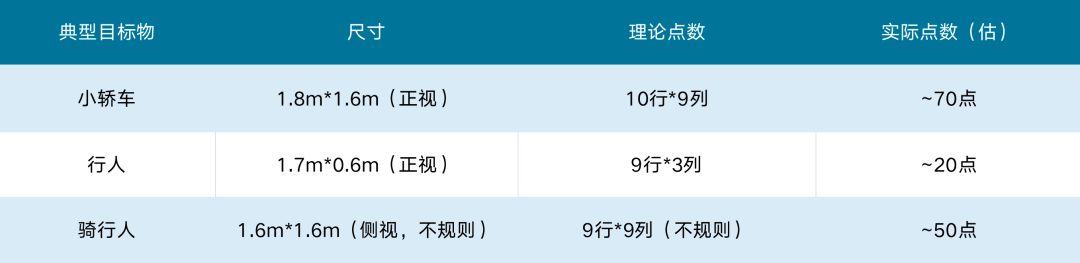
※ 如上表所示,對典型的目標物(小轎車、行人和騎行人)來說,即使考慮到MEMS掃描的特殊性,在20米距離下也能有足夠多點數來支撐算法準確輸出高置信度的目標級感知結果。
其次,補盲雷達的應用場景不僅要求它對近距離的物體有探測輸出,同時對被測物體輪廓的細節也有一定要求。
舉個例子,在自動泊車場景中,補盲雷達需要對非結構化的各類異形物體進行探測,作為對現行攝像頭與超聲波雷達識別能力不足的補充,實現安全快捷的泊車。
那么,是否可以簡單粗暴地認為角分辨率越小越好?直接將角分辨率定為0.1°甚至更小能實現完美效果嗎?
答案是否定的。
角分辨率并不是越小越好,過小的分辨率會對激光雷達的應用造成負面影響。
當我們用手機上號稱1億像素的主攝像頭拍照時,極大概率輸出照片的分辨率只有幾百萬,至多千萬像素。原因在于1億像素雖然提升照片的細節,但卻也犧牲了像素的尺寸,導致圖像的感光性能并不出色。
此外,過多的像素會導致存儲空間的占用。實際上,絕大部分情況下,千萬像素已經能夠提供非常出色的感官效果,畢竟需要把圖片放大數倍看細微細節的應用少之又少。
同樣的考量對激光雷達也適用,特別是對補盲激光雷達,角分辨率不能太小。
補盲激光雷達的視場角都非常大,尤其垂直視場角通常是長距激光雷達的3倍。如果這時將角分辨率設定得非常小,就會造成補盲激光雷達單幀的數據量過大,對域控的算力造成壓力。
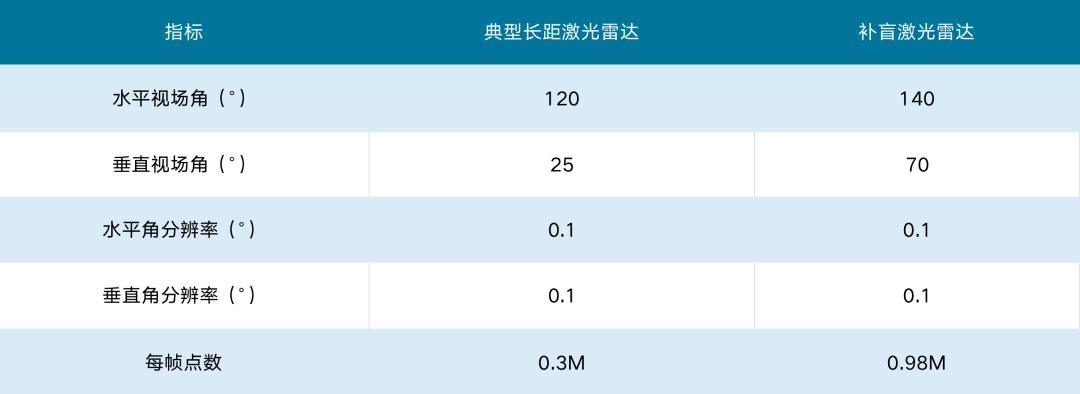
激光雷達單幀數據量對比
同時,在一輛自動駕駛車上,其所需的補盲激光雷達數量通常比長距雷達多,單幀數據量過大將對域控的算力造成更大的壓力。
也許有人會說,激光雷達的數據量與目前車載攝像頭的數據量比是小巫見大巫,對越來越大的算力平臺而言不算什么。
確實,對于嵌入式神經網絡處理器(NPU)的算力總量而言,激光雷達占用的算力不大。但對于目前主流的算力芯片而言,中央處理器(CPU)才是拖油瓶;激光雷達的數據在進入網絡前需要調用CPU來進行必要的數據解析、濾噪等操作,更不用說并發的超大激光雷達數據量對于車載以太網絡造成的壓力。
平衡點在哪里?
一方面,角分辨不夠小,無法滿足對物體細節的探測要求;另一方面,角分辨率過小,會對域控算力造成壓力。平衡點在哪里?
實際上,在短距激光雷達的感知距離內,稍高的角分辨率就能保證足夠的物體細節感知能力,不需要對角分辨率過度苛求。
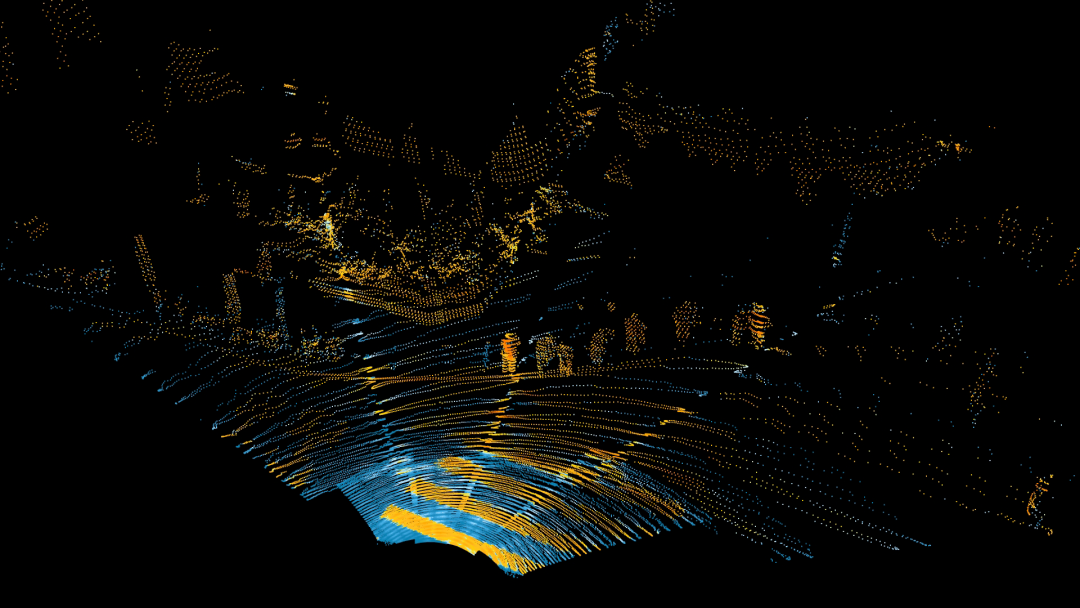
以一徑的第一款短距激光雷達ML-30s為例,這款產品的平均角分辨率為0.44°×0.44°。過去三年中,眾多典型場景的實際落地,已經充分證明這樣的角分辨率組合能夠在近車身區域取得極佳的成像細節。
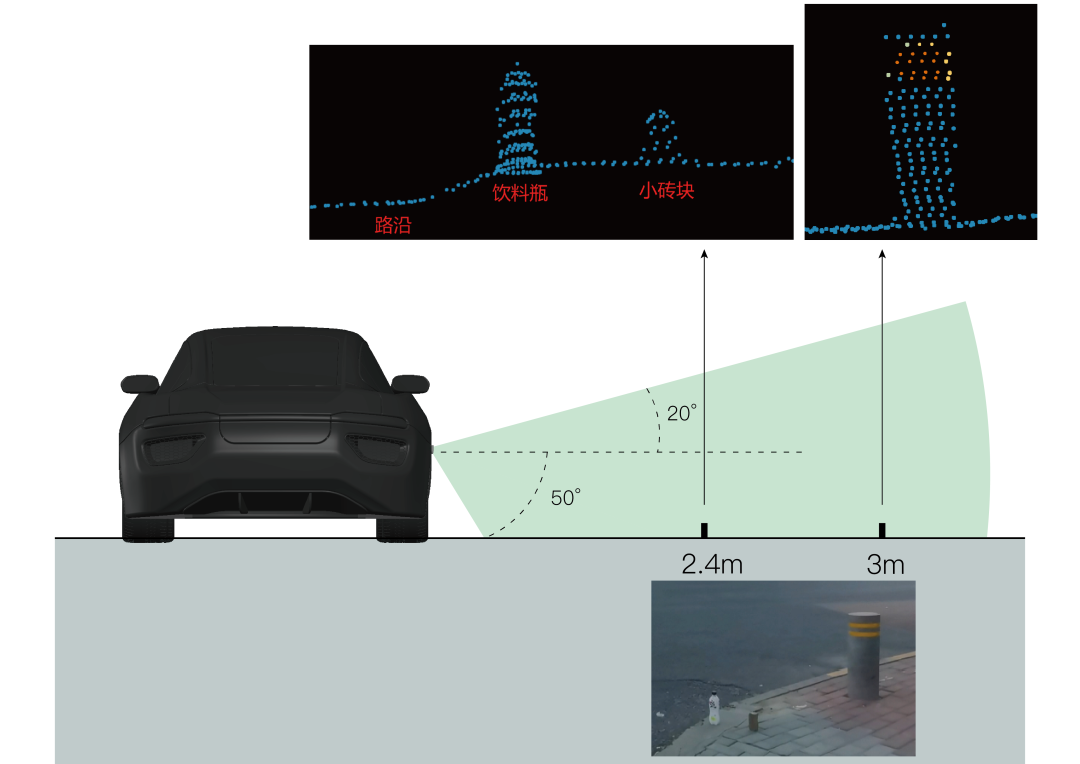
上圖是ML-30s在典型場景的測試結果,可以清晰地分辨出飲料瓶、小磚塊和遠處的路樁。更重要的是,從點云圖中還能清晰地分辨出路沿的坡度變化。
ML-30s實際探測能力總結
此外,為了達到上述的小物體分辨能力,除了足夠的角分辨率外,測距的精準度也是關鍵。測距精度不高,將無法形成較為清晰的點云輪廓,也無法對上述細微坡度進行精準探測。更多的探測場景如下圖所示:
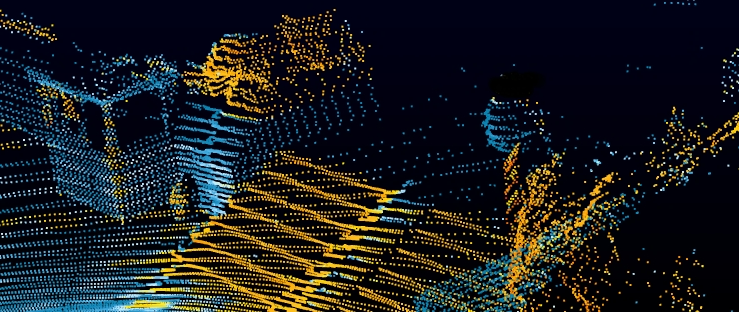
以上可以看出,恰當的角分辨率,讓補盲激光雷達能夠探測到足夠致密的點云,大大增強近車身區域的感知能力,從而為實現各類近車身的高難、高復雜度的場景提供可能。
然而,合適的角分辨率僅能夠保證看清局部,要看清全局,全視場一致性是不能被忽視的性能。
2
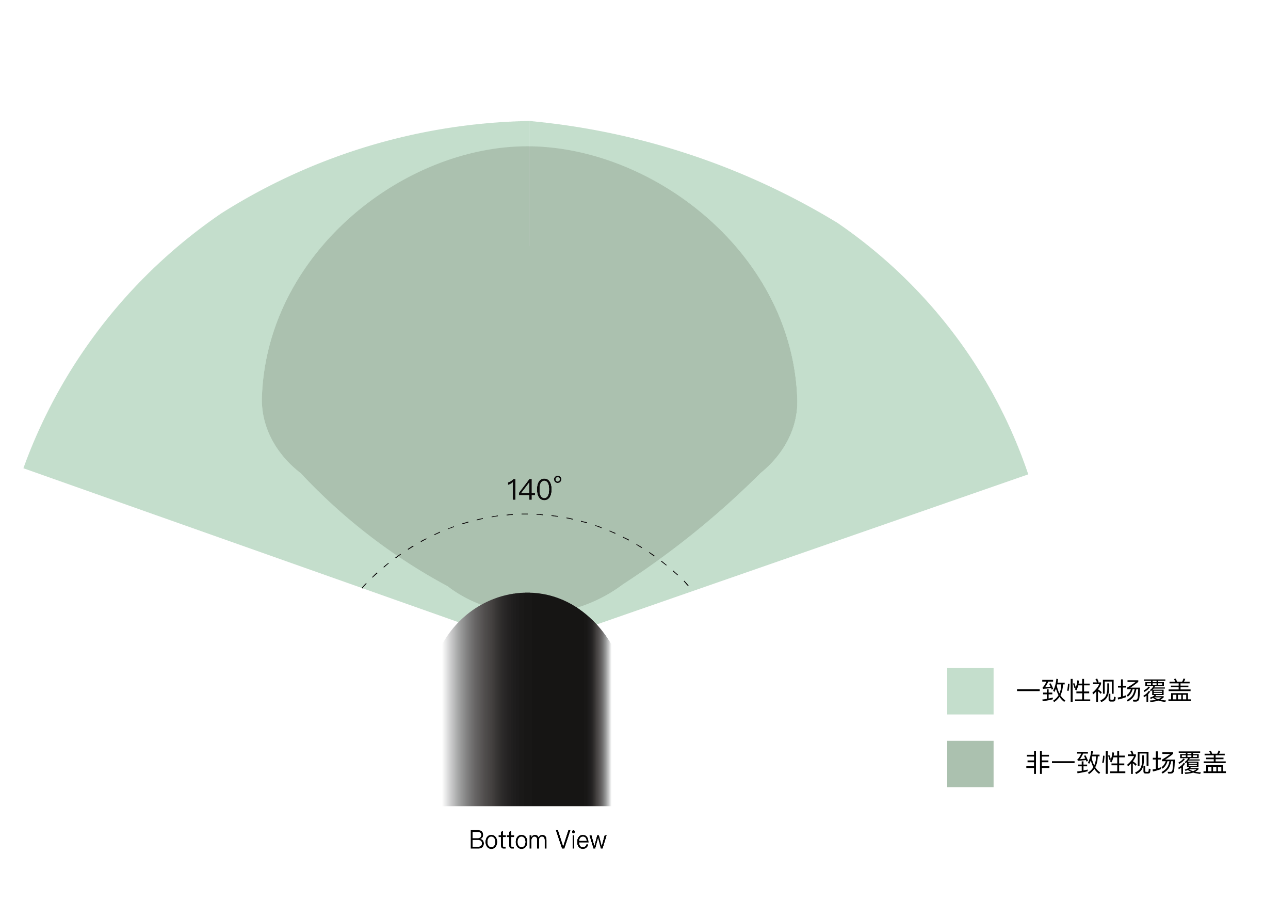
全視場一致性:無差異的感知能力
補盲激光雷達在追求大視場角和高分辨率的同時,往往容易忽略一個很重要的維度:無差異的大視場感知能力。
實現無差異感知的關鍵是視場內測距能力的一致性,特別是水平視場測距的一致性。
由于很難在產品規格參數上有所體現,測距一致性極容易被忽略。然而對主打車輛近場探測的補盲雷達而言,其主要任務就是在視場角所覆蓋的范圍內對環境有可靠的、無差別的感知。
因為從應用場景上看,無法嚴格區分哪個方向要看得遠、哪些地方要看得近。甚至,越是邊沿視場區域,對補盲雷達的探測能力的要求就越高。
我們來看2個典型場景。
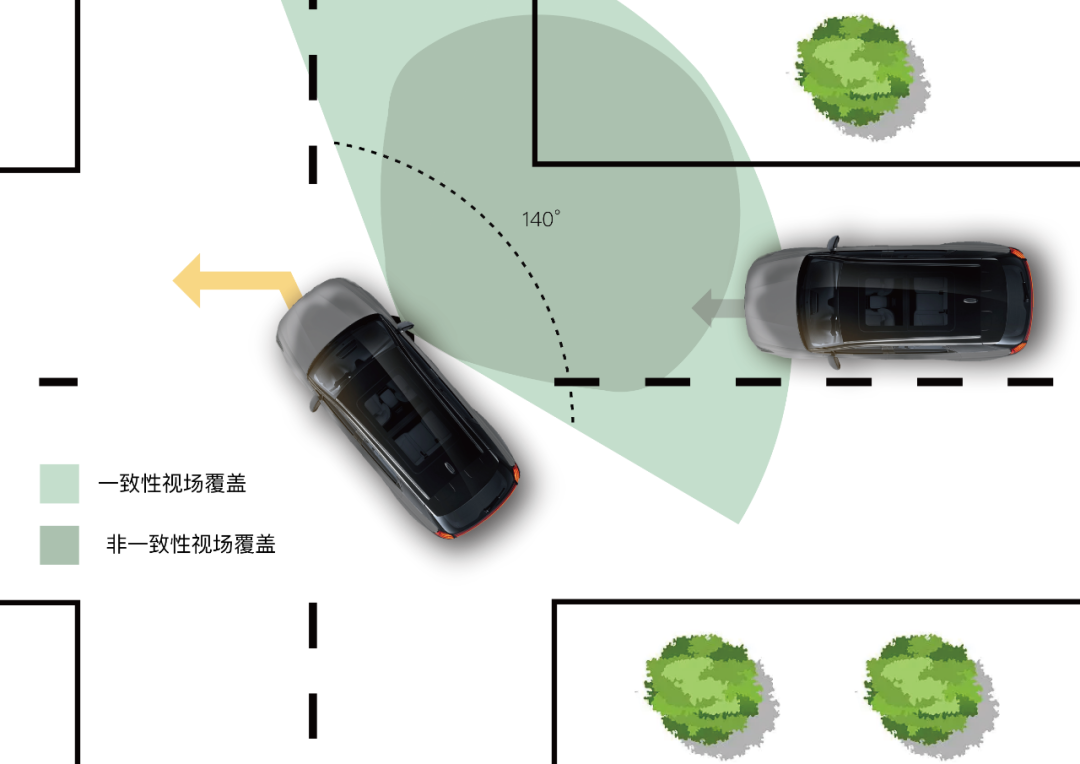
在車輛左轉場景中,相比于區分主次的視場定義方式,全視場測距能力一致更能確保左轉的全過程全視場無差別地感知右側來車,從而更好地選擇安全舒適的駕駛策略;相應地,如果個別視場的測距明顯較短,將造成目標跟蹤時斷時續或目標物突然出現,而這都是智駕系統不愿意看到的結果。
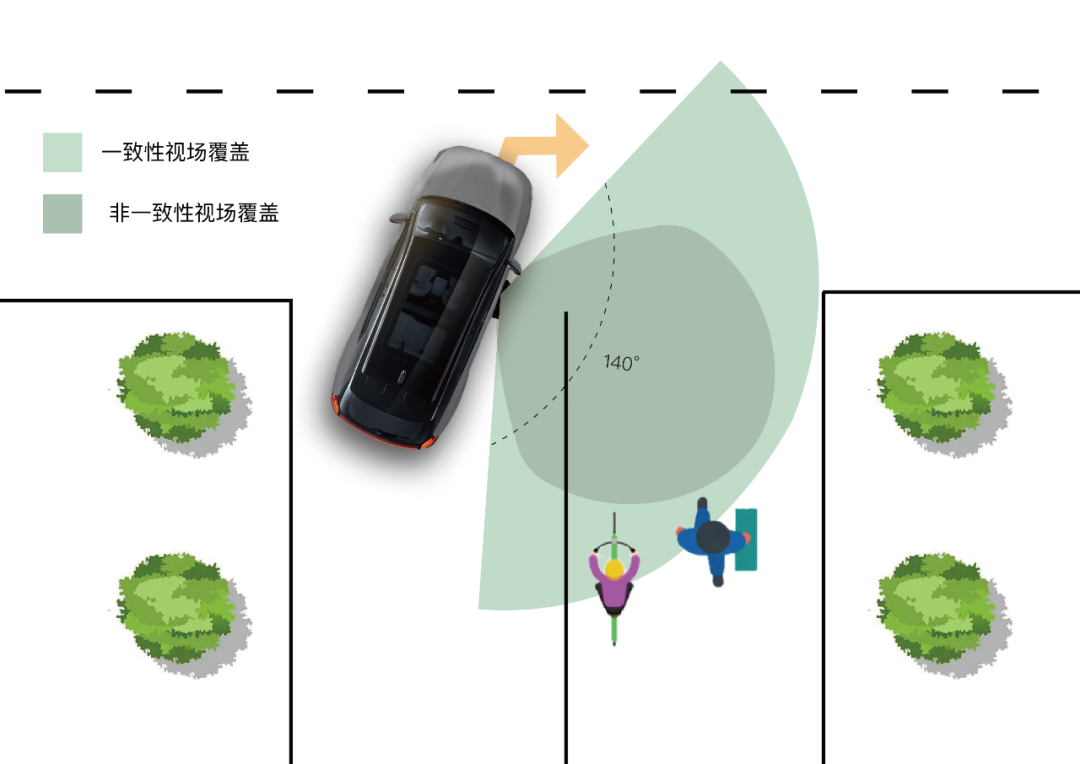
在車輛右轉場景中,弱勢交通參與者的速度相對較低,但由于潛在碰撞場景對人的傷害威脅更大,這樣的場景對探測要求反而更苛刻。這種情況下,視野范圍內無差別探測能力能保證激光雷達持續穩定地感知到騎行者和行人,最大程度保證盲區的安全性。
全視場測距一致的必要性已經明確,但實際的應用中卻存在一定挑戰。這是因為:
與一般大角度覆蓋傳感器一樣,激光雷達的邊沿視場也存在能力下降的情況,越靠近邊沿,激光雷達的視場探測能力會逐漸下降。
因此,如何從工程實現角度盡可能避免邊沿視場測距能力下降以實現無差別感知,就顯得至關重要。特別是對類似相機架構的Flash激光雷達而言,其工程實現上會面臨更大的挑戰。
基于對角分辨率和視場測距一致性的深入思考和研究,以及實際應用中多領域的客戶反饋及持續迭代經驗,一徑科技的補盲激光雷達從產品架構設計上充分考量相關因素:
采用~0.5°的“恰當”角分辨率
兼顧適中的數據量、廣闊的視場角,看得夠廣
能夠實現最大程度持續、無差別的有效感知,看得夠清
而要成為一款性能優異的激光雷達,要考量的因素遠遠不止于此,還需要在產品的內在邏輯上進行嚴密的設計,做到不僅能用,更要好用。
下一篇,我們將詳細聊聊,車規全要素的軟件功能如何賦予補盲激光雷達「好用」的性能。
審核編輯 :李倩
-
激光雷達
+關注
關注
971文章
4196瀏覽量
191989
原文標題:補盲激光雷達,角分辨率越小越好嗎?
文章出處:【微信號:ZVISION_BJ,微信公眾號:一徑科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
激光雷達(LiDAR)技術方案與工作原理全解析

自動駕駛激光雷達:原理、類型與應用梳理

激光雷達進化史:從機械式到全固態
激光雷達VS高分辨率感知雷達:為更安全、更智能的汽車選擇合適的傳感器
激光雷達技術或可助力防御無人機
激光雷達技術的基于深度學習的進步
激光雷達在地形測繪中的作用
激光雷達與其他傳感器的比較
物聯網系統中的自動駕駛的“眼睛”_純固態激光雷達

lidar激光雷達掃描儀有什么用
激光雷達與毫米波雷達的優缺點是什么
鐳神智能新品發布:超廣視場角1550nm光纖補盲激光雷達,守護工程機械設備作業安全

一文看懂激光雷達

愛普生IMU產品在激光雷達測繪中的應用






 工商網監
工商網監
評論