 激光雷達(LiDAR)技術方案與工作原理全解析
激光雷達(LiDAR)技術方案與工作原理全解析
在自動駕駛、智慧城市、機器人導航等眾多前沿科技領域,激光雷達(LiDAR,Light Detection and Ranging)正扮演著愈發關鍵的角色。它憑借高精度、高分辨率的探測能力,為各類智能系統提供了強大的環境感知支持。本文將深入剖析激光雷達的技術方案與工作原理,帶您走進這一前沿傳感技術的核心世界。

工作原理:激光束的奇妙探測之旅
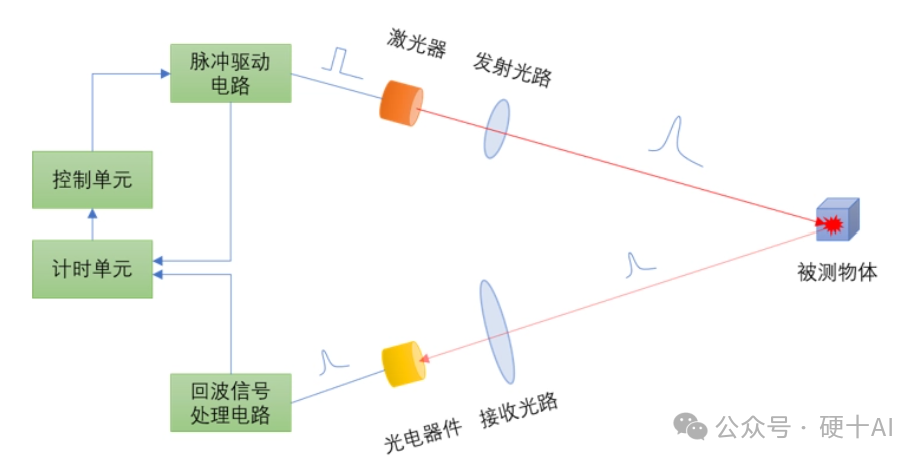
激光雷達的工作原理猶如一場精心編排的激光探測之旅。它主要由發射系統、接收系統和信號處理系統三大部分構成。
發射系統如同一位精準的“光束使者”,負責發射出一束對人畜無害的紅外激光脈沖。這些激光脈沖以極快的速度射向周圍環境中的目標物體。當激光束遇到目標物體時,會發生反射現象,部分光束會沿著原路返回。
接收系統則扮演著“光影捕手”的角色,時刻準備捕捉這些反射回來的激光信號。一旦接收到反射光,接收系統會迅速將其轉化為電信號,為后續的處理做好準備。
信號處理系統是整個過程的核心“大腦”,它會對接收到的電信號進行細致入微的分析和處理。通過精確測量激光脈沖從發射到接收所經歷的時間(TOF,Time of Flight),再結合已知的光速,根據公式d=21ct(其中d是目標距離,c是光速,t是飛行時間),就能夠準確計算出目標物體與激光雷達之間的距離。
不僅如此,激光雷達還能通過對反射信號的強度、頻率等特征進行分析,獲取目標物體的更多信息,如方位、高度、速度、姿態甚至形狀等參數。最終,這些豐富的信息經過處理后,以點云的形式呈現出來。點云是由大量具有三維坐標信息的點組成的數據集合,它就像是一幅三維世界的數字地圖,直觀地展現了周圍環境的詳細特征。
技術方案:多種掃描方式的精彩呈現
根據掃描模塊的結構差異,激光雷達主要可分為機械式、半固態和固態三大類,每種類型都有其獨特的技術特點和適用場景。
機械式激光雷達:經典且成熟的360°環繞掃描
機械式激光雷達是最早進入市場且技術最為成熟的一種方案。它的核心結構是在垂直方向上整齊排布多束激光器,然后通過電機帶動整個光電結構進行360°高速旋轉。在這個過程中,多束激光同時發射,通過不斷旋轉發射頭,將點連成線,進而形成三維點云。
機械式激光雷達的線數與分辨率成正比,線數越多,分辨率就越高,能夠探測到的環境細節也就越豐富。同時,它還具有高測距的特點,能夠準確感知遠距離的目標物體。例如,一些應用于自動駕駛領域的機械式激光雷達,可以實現對車輛周圍環境全方位、高精度的感知,為自動駕駛系統提供可靠的環境數據支持。
然而,機械式激光雷達也存在一些明顯的不足。由于需要依賴旋轉部件來實現掃描,其結構相對復雜,體積較大,不僅增加了安裝和集成的難度,還使得成本居高不下。此外,旋轉部件的長期運轉會導致磨損,影響雷達的可靠性和使用壽命。
半固態激光雷達:穩定與成本的平衡之選
半固態激光雷達是機械式和純固態式的一種折中方案,它在保證一定性能的同時,有效降低了成本,提高了系統的穩定性。
以轉鏡方案為例,其收發模塊保持靜止不動,電機僅帶動轉鏡進行高速旋轉。在轉鏡旋轉的過程中,激光束被反射至空間的不同位置,從而實現對周圍環境的掃描探測。這種方案減少了可轉動的部位,使得系統更加穩定可靠,同時也降低了制造成本。法雷奧的轉鏡方案就是其中的典型代表,它是第一個通過車規認證、成本可控,且能夠滿足車企性能要求并實現批量供貨的技術方案。
微振鏡方案則采用了高速振動的二維MEMS微振鏡來實現對空間的掃描測量。MEMS微振鏡是一種在硅基芯片上集成的微小反射鏡,通過控制微小的鏡面平動和扭轉往復運動,將激光反射到不同的角度完成掃描。該方案的技術創新點在于不斷開發口徑更大、頻率更高、可靠性更好的振鏡,以適應激光雷達的技術發展需求。
固態激光雷達:未來發展的終極形態
固態激光雷達被視為車載激光雷達的終極形態,它最大的特點是無任何機械運動部件,理論上體積可以縮小到所有方案中的最小尺寸。
其中,OPA(光學相控陣)技術是一種極具潛力的實現方式。它通過施加電壓調節每個相控單元的相位關系,利用相干原理,實現發射光束的偏轉,從而完成對空間一定范圍的掃描測量。OPA技術取消了機械運動部件,具有無慣性器件、精確穩定、方向可任意控制等優點。其工作原理是激光器功率均分到多路相位調制器陣列,光場通過光學天線發射,在空間遠場相干疊加形成一個具有較強能量的光束;經過特定相位調制后在光場的發射天線端產生波前的傾斜,從而在遠場反映成光束的偏轉,通過施加不同相位,可以獲得不同角度的光束形成掃描的效果。
Flash技術則采用了類似照相機的工作模式,感光元件的每個像素點可以記錄光子飛行的時間信息,由此能夠輸出具有深度信息的“三維”圖像。不過,該技術目前存在視場角(FOV)受限、掃描速率較低等問題,需要進一步的技術突破來解決。
不同技術方案的應用現狀與發展趨勢
在國內市場,主機廠選擇上車的激光雷達主要采用混合固態(包括轉鏡、棱鏡、MEMS)方案。這主要有兩方面原因:一是混合固態較機械式激光雷達更易降低成本,同時與純固態(OPA、Flash)相比,技術相對成熟,更易實現商業化落地;二是轉鏡方案等混合固態方案在性能、成本和可靠性等方面能夠較好地滿足當前市場需求。
例如,小鵬P5搭載的2顆激光雷達來自大疆Livox定制版車規級Horiz浩界,采用了雙棱鏡掃描方案,最大探測距離為150m(@10%反射率),橫向視場角120度,角分辨率為0.16°×0.2°,點云密度等效于144線激光雷達,為車輛的自動駕駛功能提供了強大的環境感知能力。
從發展趨勢來看,固態激光雷達憑借其體積小、穩定性高、成本低等優勢,被認為是未來的主流發展方向。目前,全球眾多企業和科研機構都在加大對固態激光雷達技術的研發投入。例如,Quanergy公司已經將相控陣列激光雷達引入商業視野,正研發適用于車內傳感系統和無人駕駛汽車的全固態激光雷達。我國的鐳神智能、北科天繪、速騰聚創、禾賽科技等企業也開始在MEMS激光雷達領域展開研究,但仍未大規模商用;LeddarTech、北醒科技、光珀智能、華科博創等公司在Flash激光雷達領域不斷推出新產品。
然而,要實現全固態、小型化、高性能激光雷達的大規模應用,仍然面臨一些技術挑戰。例如,需要進一步提高OPA技術的相位調制精度和掃描范圍,解決Flash技術的視場角和掃描速率問題等。
激光雷達作為一種先進的激光探測傳感器,憑借其獨特的工作原理和多樣化的技術方案,在眾多領域展現出了巨大的應用潛力。隨著技術的不斷進步和創新,相信激光雷達將在未來為我們帶來更多的驚喜和變革,推動智能科技邁向新的高度。
審核編輯 黃宇
-
激光雷達
+關注
關注
971文章
4181瀏覽量
191795 -
LIDAR
+關注
關注
10文章
341瀏覽量
30123
發布評論請先 登錄
自動駕駛激光雷達:原理、類型與應用梳理

激光雷達技術在自動駕駛汽車中的應用

激光雷達技術:自動駕駛的應用與發展趨勢

DeepSeek:2025年激光雷達技術與行業應用趨勢

科普:一文了解固態和半固態激光雷達
激光雷達的工作原理和分類
激光雷達的維護與故障排查技巧
激光雷達技術的發展趨勢
激光雷達在自動駕駛中的應用
LIDAR激光雷達逆向建模能用到revit當中嗎
光學雷達和激光雷達的區別是什么
lidar激光雷達掃描儀有什么用
激光雷達與毫米波雷達的優缺點是什么
激光雷達選型秘訣,五大要素助您輕松決策






 工商網監
工商網監
評論