 速銳得解碼本田雅閣混動版整車網關CAN總線通信協議DBC控制策略
速銳得解碼本田雅閣混動版整車網關CAN總線通信協議DBC控制策略
本田汽車增城工廠就在附近50多公里的地方,和比亞迪汽車差不多,無論怎么跑都得1個多小時,也因為近水樓臺的天然優勢,而我們也與本田安全駕駛中心有多次深度的合作。碗里的肉,基本上都是上過了速銳得砧板。
近,有幾個好處,天然的響應速度,更快地驗證可行性,可以厚著臉皮去蹭飯。相對而言,跨省的項目做起來,時間周期上就會存在預約的情況了。曾記得2016年與本田開始合作試乘試駕管理項目,主要是采集車速、點火狀態、轉速、里程、軌跡、轉向燈相關信息,他們用于對所有本田的試乘試駕車輛進行對應的管理,根據試乘試駕的熱力圖,投放對應的車型、廣告、物流、倉儲等等。
如果是熟悉本田的用戶或者專業人士,看過電視的廣告,說本田的安全氣囊永遠都比別人快0.1秒,大概就是這么測試投入出來的。在2019年速銳得與本田安全駕駛中心合作中,本田要完成檢驗自己的控制器,在加速、剎車、ABS、水溫、進氣閥、里程、剎車距離、最高車速等不同狀態測試ECU控制單元的輸出曲線值用于汽車駕駛中的各種情況控制,這些數據都需要接入本田的網關系統。
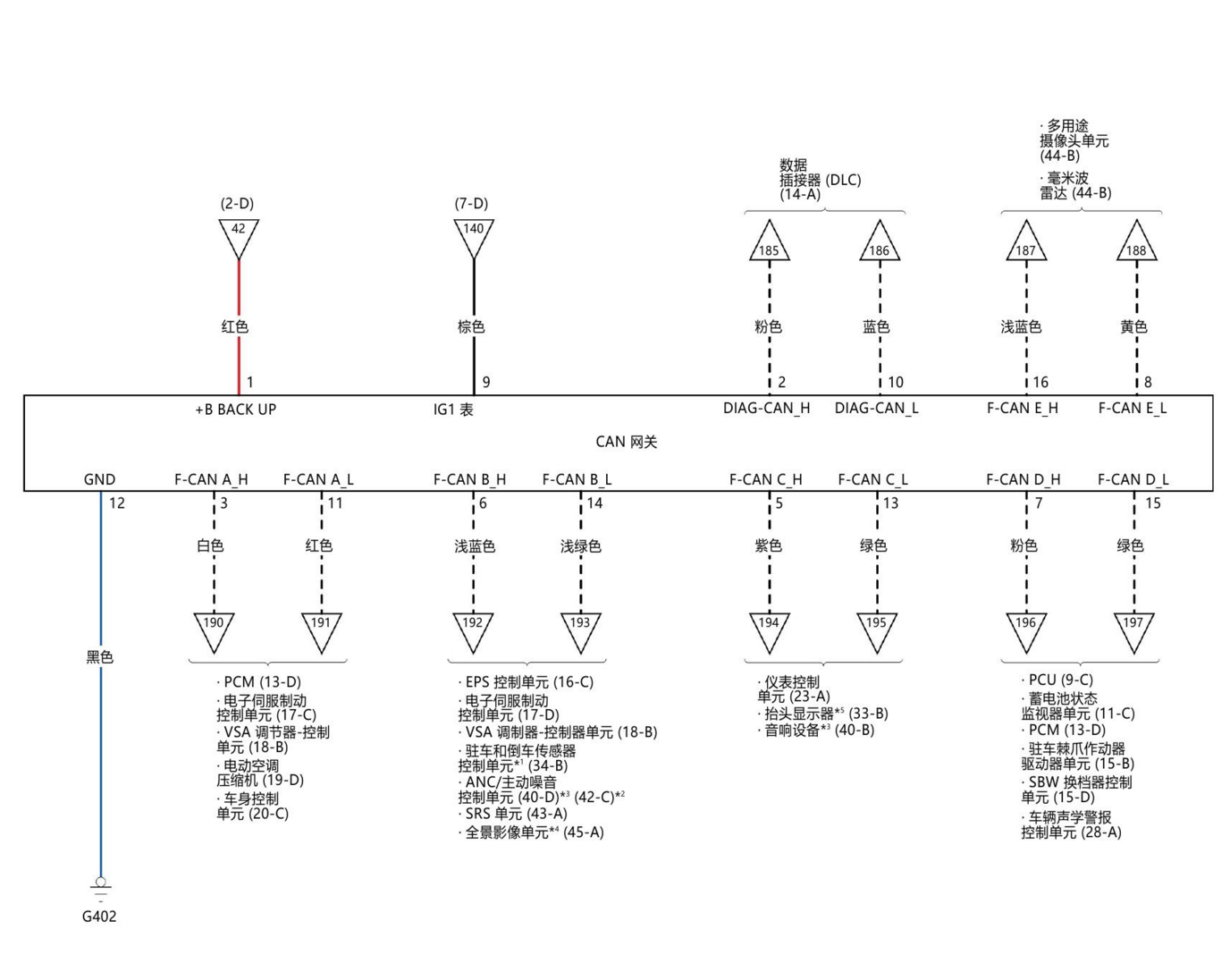
本田的網關系統圖紙如下所示:
近期,應本田的本田安全駕駛中心研發周總監的邀請,需要速銳得針對新款本田雅閣混動版整車網關CAN總線通信協議采集DBC,主要解決幾個問題:1、解決車輛報故障問題、2、解決檔位邏輯問題、3、剎車行程、方向盤轉向角度、行駛狀態下檔位DBC,4、OBD輸出信號限流。
從第一個問題分析,報故障問題,這種多為控制器協議與原車協議不匹配,要么控制器需要根據傳感器或者指定單元過來的數據協議變更為兼容的協議類型,要么數據頻率不對導致儀表盤報警。這個問題在改裝領域經常發生,比如協議格式不對,或者協議內容不同,或者協議的頻率不同都會給汽車帶來故障碼或者控制單元失效。這個問題很好解決,其實只要把兩端的CAN數據協議、報文、頻率歸納成一致性的,基本就可以解決了,這個有點太簡單。
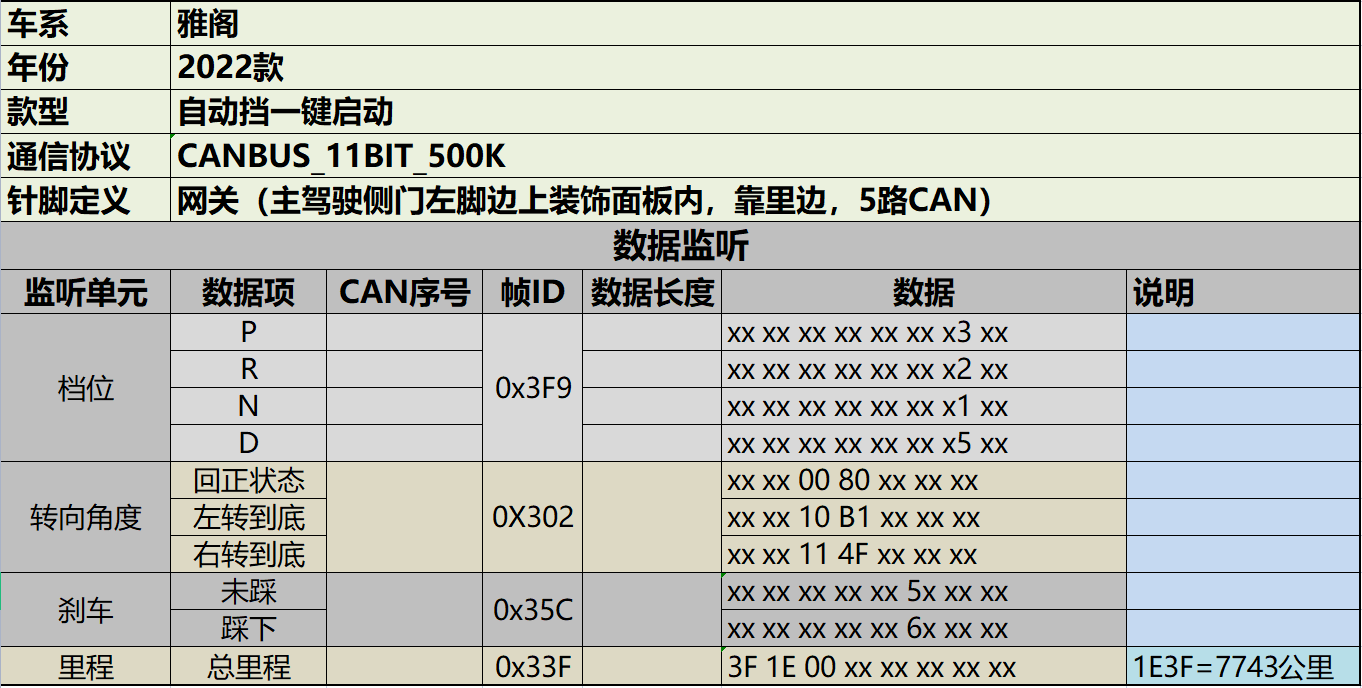
速銳得根據采集和分析本田雅閣部分簡單報文如下所示:
第二個問題,檔位邏輯和第三個問題可以同步處理,這些都是駕駛類的數據類目。本田雅閣混動版的電機轉向命令包括正轉(對應前進擋D),反轉(對應后退擋R)及空轉(對應擋N)。自帶轉向切換的車速保護,需考慮車輛前進時(車速為正)掛R擋和車輛后退時(車速為負)掛D擋給電機的轉向指令。允許進行擋位切換的條件為車速小于一定值(如3km/h),但不允許大于該值進行擋位切換。車速如果過高就進行轉向的切換,會有較大的沖擊,可能會產生危險或對電機造成傷害。如果車速大于該標定值,輸出的轉向指令應為空擋。
根據電機反饋的轉速確定電機所處的轉向狀態,電機的轉速在一定的正負限制值之間,電機處于空轉狀態;電機未處于空轉狀態,同時電機的轉速大于零,電機處于正轉狀態;電機既未處于空轉狀態,也未處于正轉狀態,則電機處于反轉狀態。
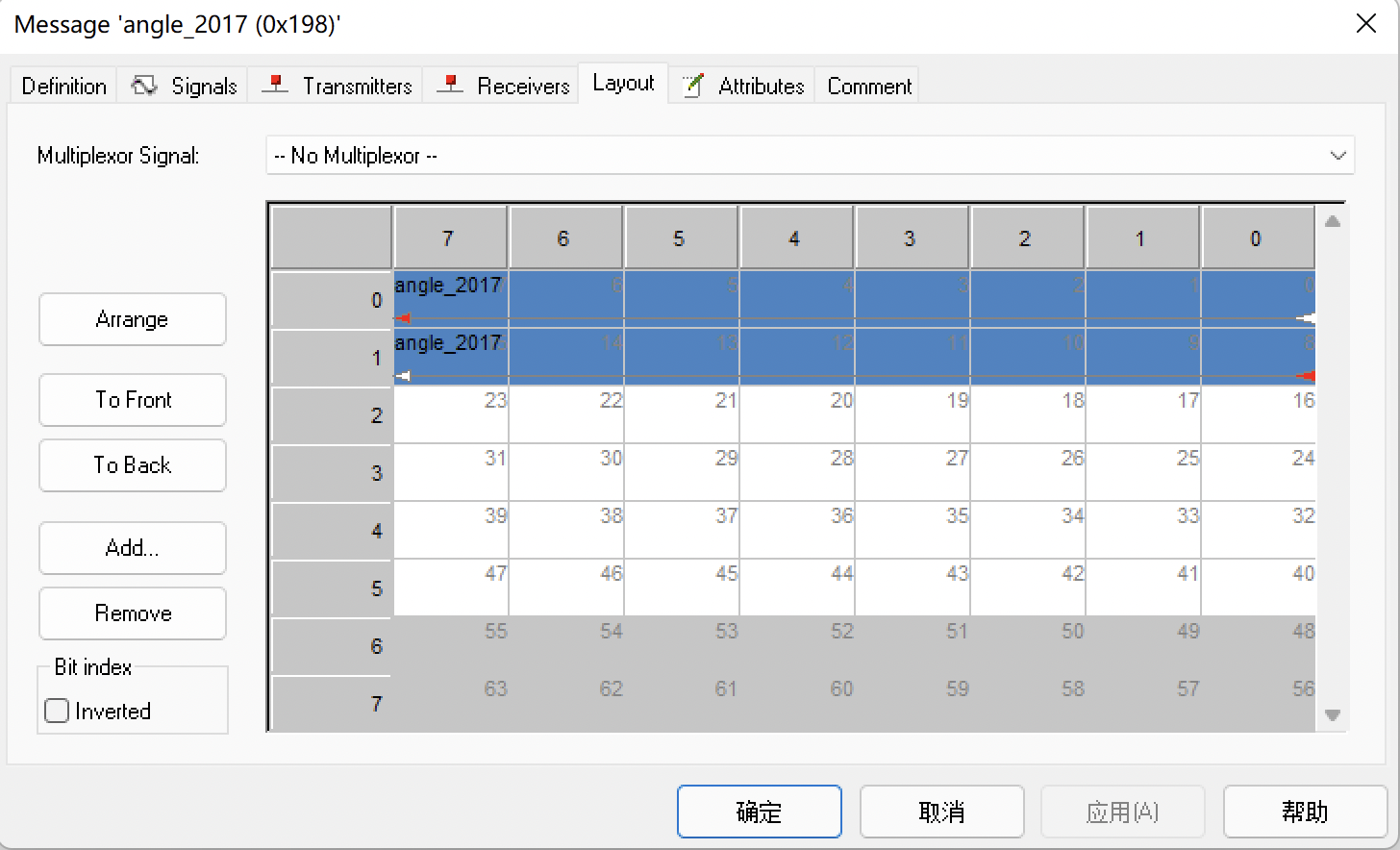
本田檔位DBC編譯后輸出矩陣圖,如下所示:
考慮到允許進入該轉向模式的扭矩因素,當扭矩動態管理模塊輸出的電機扭矩指令大于-5Nm(標定值),同時換擋器的輸入為D擋,混動電機所處的轉向狀態為正轉,則允許輸出正轉。當扭矩動態管理模塊輸出的電機扭矩指令小于5Nm(標定值),同時換擋器的輸入為R擋,電機所處的轉向狀態為反轉,則允許輸出反轉。非動力擋向動力擋切換時需要踩剎車,若沒有踩剎車,則認為是N擋,并且必須將擋位掛為N擋才可以嘗試重新掛入動力擋;如果車速大于3km/h(TBD),則允許不踩剎車的情況下由N擋掛入動力擋。
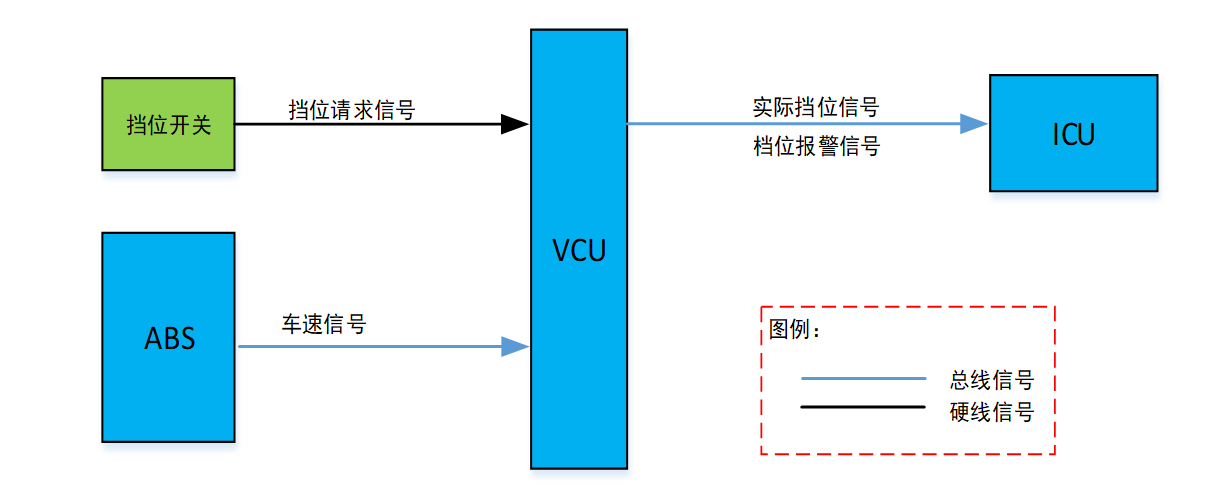
本田雅閣混動的整車控制器將物理擋位發送給儀表ECU將處理之后的實際擋位發送給BCM,倒車雷達等ECU供相關動作執行;如果駕駛請求擋位(輸入擋位)和VCU處理后的實際擋位不一致,則發送報警信號到儀表,D檔和S檔可直接切換。
檔位信號采用硬線信號,由整車控制器接收處理。
| 檔位 | 信號 |
|---|---|
| D | D檔輸出高有效 |
| N | N檔輸出高有效 |
| R | R檔輸出高有效 |
| S | D、S檔同時輸出高有效 |
第四個問題,直接軟件解決,通過控制OBD這邊的輸入頻率就可以了,因為本田雅閣混動版的內部數據很多是以毫秒級計算的,數據過快會導致芯片工作運營效率降低,OBD本身不是重要的外擴單元,只是用于常規診斷,對數據的實時性要求不高,通過政策控制器的頻率降低,解決這個問題,相對來說,是最簡單直接的。
經過本田安全駕駛中心測試,部分微調以外,其他基本搞定,后面拿了新款本田凌派測試,數據一致性完美兼容,那么,意味著,本田這個CGP平臺,可以拍胸脯了。
審核編輯 黃昊宇
-
CAN
+關注
關注
57文章
2893瀏覽量
466779 -
網關
+關注
關注
9文章
5329瀏覽量
52492 -
汽車
+關注
關注
14文章
3801瀏覽量
39245
發布評論請先 登錄
如何用泰克MSO5系列混合信號示波器調試IoT和CAN總線






 工商網監
工商網監
評論