") 雪天環(huán)境的激光雷達點云實時處理網絡研究
雪天環(huán)境的激光雷達點云實時處理網絡研究
激光雷達是一種主動傳感器,其發(fā)射的脈沖光波后利用返回的脈沖計算其與周圍物體之間的距離。這種特性,使得激光雷達無論在白天還是夜間,都可以對周圍的場景進行詳細的3D測量。在現(xiàn)在很多的數(shù)據(jù)集中,都可以很容易地找到此類測量值,如逐幀點云,這些數(shù)據(jù)通常以10Hz的頻率進行采樣,并已用于3D對象檢測、語義分割和建圖。
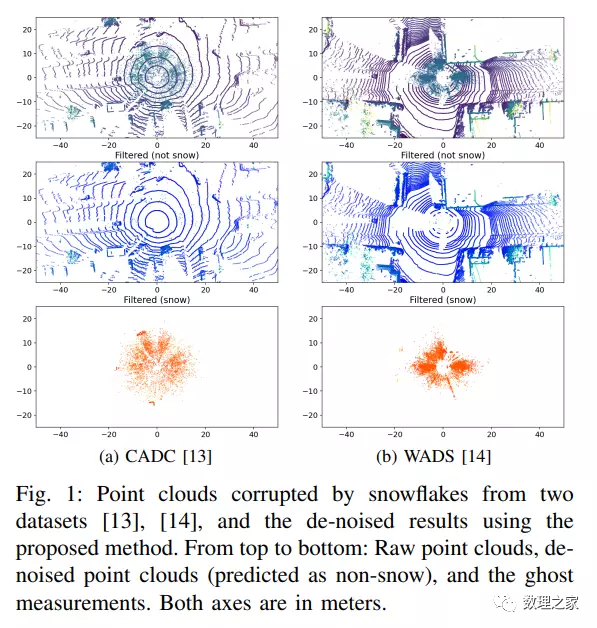
盡管與毫米波雷達相比,激光雷達提供了更精確的3D測量,但在惡劣的天氣條件下,測量結果很容易退化。與可以透過霧、雪花和雨滴的毫米波雷達不同,激光雷達受到空氣中粒子的極大影響。特別是在降雪期間,脈沖信號撞擊雪花并得到重影的測量返回傳感器,如圖1a和1b所示。對于地圖構建等應用來說,移除這些測量值、揭示場景的基本幾何結構至關重要。這篇文章提出一種雪天環(huán)境的激光雷達點云實時處理網絡,在去噪方面得到了性能提升,速度也比當前的SOTA算法提升了52倍。
01 方法
1.1 預處理
第一步,將點云轉換為距離圖像。給定數(shù)據(jù)集中第k個點云中的點![]() ,其對應的強度值
,其對應的強度值![]() ,我們可以得到下面的值。
,我們可以得到下面的值。

![]() 是點到激光雷達中心的距離,
是點到激光雷達中心的距離,![]() 是傾角,
是傾角,![]() 是方位角。通過離散激光雷達視場(FOV)內的傾角和方位角,我們可以將點云內的每個點投影到球面坐標上,可以得到距離圖像
是方位角。通過離散激光雷達視場(FOV)內的傾角和方位角,我們可以將點云內的每個點投影到球面坐標上,可以得到距離圖像
,其中,![]() 是索引幀,是垂直分辨率,
是索引幀,是垂直分辨率,![]() 是水平分辨率。
是水平分辨率。
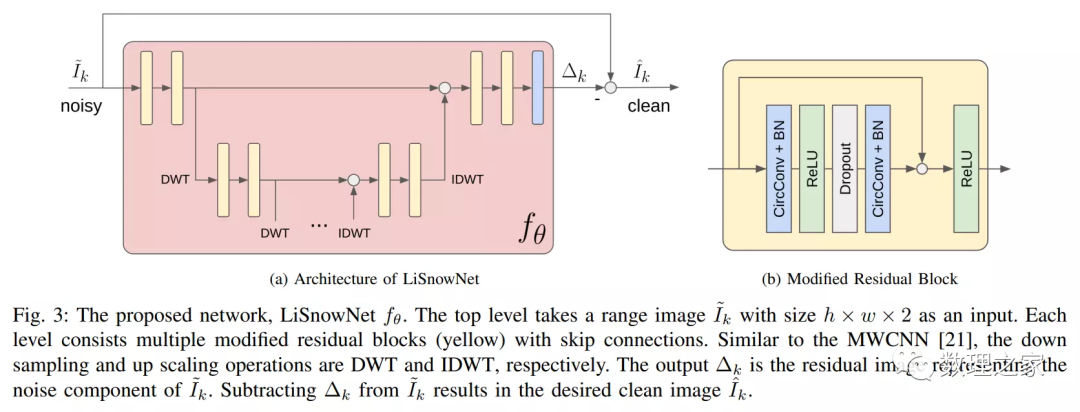
第二步,是將距離圖像壓縮到適當?shù)谋壤H鐖D1所示,一個很關鍵的問題是重影測量主要集中在25米的距離內,但激光雷達的最大距離很容易超過150米。我們需要增強車輛周圍的點的重要性,并且同時維持點的順序,因為雪花的強度值幾乎都是0,而場景中通常都是具有正的強度值,所以可以提升噪聲與場景之間的對比度。最后,要明確,不是每個像素都有對應的值,因為有些方向的點事缺少的,比如天空和一些透明的點。1.2 網絡結構本文的網絡結構是在參考文獻[12]的MWCNN基礎上對部分關鍵點進行了修改。首先,使用殘差模塊替換所有具有兩個環(huán)卷積層的卷積層;然后在每個殘差模塊的第一個ReLU激活函數(shù)之后放置一個dropout層,使網絡規(guī)范化。最后,大幅度減少channel數(shù)。最終,設計的網絡可以生成對應的殘差圖
可以滿足

1.3 損失函數(shù)設![]() 為FFT的真值,
為FFT的真值,![]() 是基于Haar的DWT。然后可以設計三個新的損失函數(shù):
是基于Haar的DWT。然后可以設計三個新的損失函數(shù):
總損失函數(shù)為

02 結果
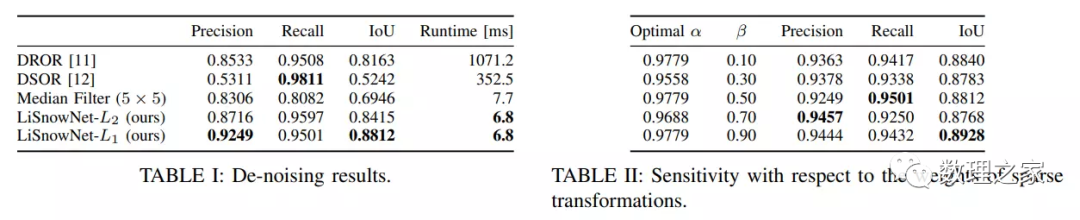
如表所示,相對于基準而言,本文所提出的網絡,在去噪方面可以有同樣甚至更好的性能;在召回率比DSOR低0.0310時,準確率和IoU明顯高于其他所有的方法。速度比DSOR方法提升了52倍,比DROR方法提升了158倍。考慮到激光雷達的采樣頻率一般是10Hz,那這種方法應該是能夠滿足實時工作的最佳方案。
03 結論
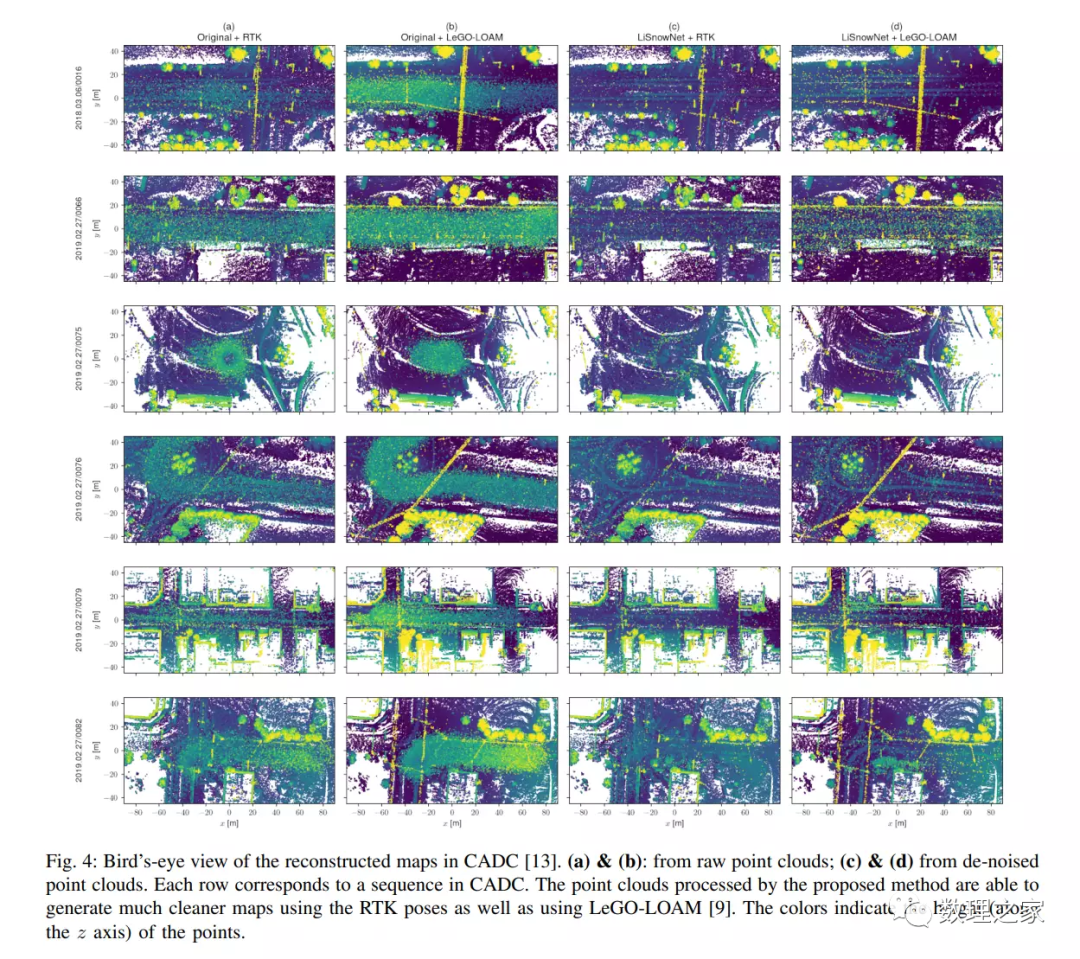
這篇文章提出了一種專門用于惡劣天氣條件下點云去噪的深度卷積神經網絡-LiSnowNet。這種網絡可以在沒有任何標記數(shù)據(jù)的情況下進行訓練,與最先進的方法相比,可以在7ms內處理10萬個點,在降噪方面效果很好。可以提高下游任務的質量,例如雪天的地圖構建。
審核編輯:郭婷
-
傳感器
+關注
關注
2564文章
52613瀏覽量
763877 -
激光雷達
+關注
關注
971文章
4196瀏覽量
191996
原文標題:IROS2022 | 雪天環(huán)境的激光點云處理
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
第三方激光雷達ASIC方案,能改變行業(yè)格局嗎?
超酷的樹莓派激光雷達掃描儀!

激光雷達在自動駕駛領域中的優(yōu)勢

輸電線路“樹線矛盾”激光雷達點云監(jiān)測裝置方案解析
一則消息引爆激光雷達行業(yè)!特斯拉竟然在自研激光雷達?
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
如何提升激光雷達數(shù)據(jù)的精度
激光雷達技術的發(fā)展趨勢
激光雷達在自動駕駛中的應用
輸電線路激光雷達點云監(jiān)測裝置的功能特點和技術參數(shù)介紹
光學雷達和激光雷達的區(qū)別是什么
激光雷達點云數(shù)據(jù)包含哪些信息
一文看懂激光雷達






 工商網監(jiān)
工商網監(jiān)
評論