 伺服系統簡介
伺服系統簡介

伺服與變頻
伺服的基本概念是準確,精確,快速定位。
變頻是伺服控制一個必須的內部環節,伺服驅動器同樣存在變頻(進行無極調速),伺服將電流環,速度環,位置環都閉合進行控制,這是很大的區別。
另外伺服電機要滿足快速響應和準確定位,其結構與普通電機會存在較大的差異。
現在市面上常用的交流伺服電機多為永磁同步交流伺服電機,但這種電機受到工藝限制,很難做到很大功率,幾十kw的伺同步伺服價格及其昂貴。這種情況下現場允許的話多采用交流異步伺服電機。這時很多驅動器實際就是高端變頻器,帶編碼器反饋閉環控制,只要滿足準確精確快速定位,實際就不存在伺服變頻之爭。
伺服與變頻共同點
首先交流伺服技術本身就是借鑒并應用了變頻技術,在直流電機伺服控制的基礎上,通過變頻的PWM方式模仿直流電機的控制方式來實現的,也就是交流伺服電機必有變頻這一環節, 變頻:就是將工頻50hz或者60hz的交流電先整成直流電,然后通過可控門極的各類晶體管(IGBTIGCT),通過載波頻率和pwm調節逆變為頻率可調的,波形類似于正余弦的脈動電。
因為頻率可調,那么速度也是可調的n=60f/p, n轉速,單位rpm,f頻率,p極對數)
變頻器:簡單變頻器只能調節交流電機的速度,這時可以開環也可以閉環,要視變頻器和控制方式而定,這就是傳統意義上的V/F控制方式。
現在很多變頻器已經通過數學模型的建立,將交流電機的定子磁場uvw 3相轉化為可以控制電機轉速和轉矩的2個電流的分量,現在能進行力矩控制的大多數品牌變頻器都是采用這樣的方式控制電機的力矩,UVW每相的輸出要加霍爾效應的電流檢測裝置,采樣反饋后構成閉環負反饋的電流環的PID調節。
伺服
伺服驅動器在發展了變頻技術的前提下,在驅動器內部的電流環,速度換和位置環(變頻器沒有位置環)都進行了比一般變頻器更精確的控制技術和算法運算,在功能上也比傳統的變頻器強大很多,主要的一點可以進行精確的位置控制,
通過上位控制器發送的脈沖序列,來控制位置和速度,(當然有些伺服內部集成了控制單元或者通過總線通訊的方式直接將位置參數和速度參數設定在驅動器里),驅動器內部算法和更快更精準的計算以及性能更優良的電子器件使之更優于變頻器。
電機方面,伺服電機的材料,結構和加工工藝一般遠高于變頻器驅動的交流電機(一般交流電機為恒功率或恒力矩的各類變頻電機)。
也就是伺服驅動器輸出電流、電壓,頻率變化很快的電源時,伺服電機就能根據這種快速的電源變化產生快速的動作響應。所以,響應特性和抗過載能力遠遠高于變頻器驅動的交流電機(變頻器可以輸出快速的信號,但是普通電機本身沒法快速響應),
交流電機分類
1)交流同步電機,轉子是永磁材料構成,定子繞組線圈通電后,形成旋轉的磁場,轉子的速度=旋轉磁場的速度,此為同步。
2)交流異步電機,轉子也是感應線圈和材料組成的,通電后,定子產生的旋轉磁場,磁場切割感應線圈,產生感應電流,進而轉子產生感應磁場,感應磁場追隨定子的旋轉磁場變化而變化,但轉子的感應磁場變化永遠小于定子磁場的變化(一旦相等感應線圈就無法切割磁力線,感應磁場,電流都會消失,)就是轉子的旋轉速度小于定子的旋轉磁場速度,此為異步。
3)對應的這兩款電機就有相應的同步變頻器和異步變頻器(常見)。對應伺服就有同步交流伺服電機(常見)和異步交流伺服電機。
伺服和變頻器的性能區別
變頻器,應用于速度控制和力矩控制要求不很高的場合,也有在上位加位置反饋信號構成閉環用變頻器進行位置控制的,但精度和響應都不高。現有變頻器也有接受脈沖序列信號控制速度的,但好像不能控制位置。
在有嚴格位置控制要求的場合,必須要用伺服來實現,還有就是伺服響應速度遠大于變頻器,對速度的精度和響應要求高的長和也是都選擇伺服控制。總結起來,能用變頻控制的場合都能用伺服取代,但伺服也存在一些問題
1)價格昂貴,伺服的價格遠高于變頻
2)功率問題,變頻最大能做大幾百kw,甚至更高,伺服最多做到幾十kw
伺服系統的選型
首先確定伺服系統的類型(開環,半閉環,閉環),需要選定執行元件(電機),根據系統負載的情況,確定伺服電機的型號
伺服電機與機械負載的匹配主要有幾個方面
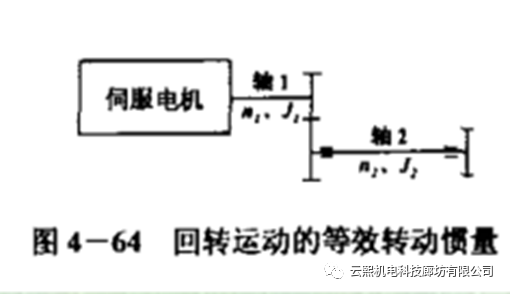
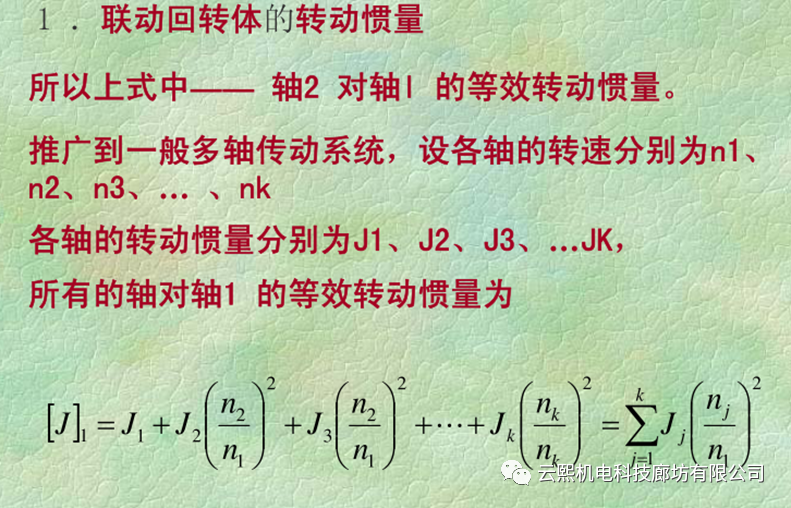
1)慣量匹配
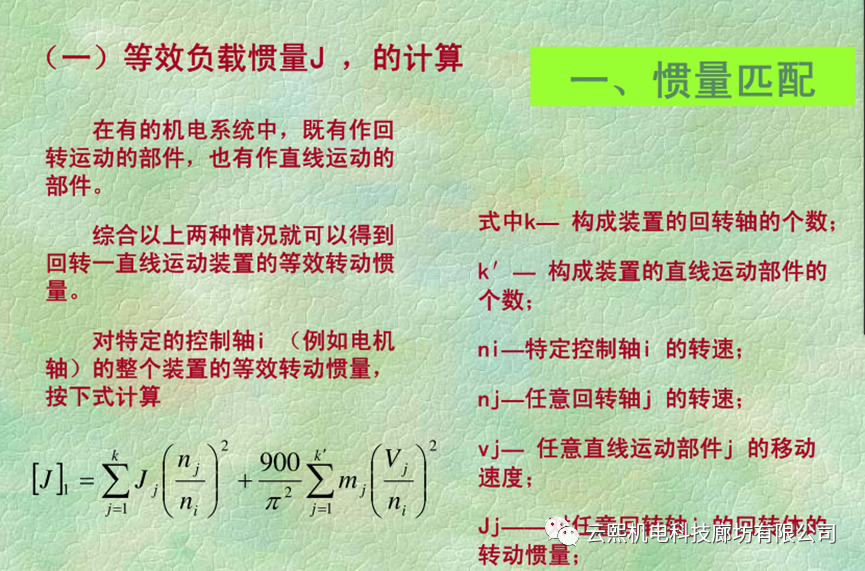
等效負載慣量J的計算
旋轉機械與直線運動機械慣量,按照能量守恒定律,通過等效換算(伺服系統中運動物體的慣量折算到驅動軸上的等效轉動慣量),均可用轉動慣量來表示。
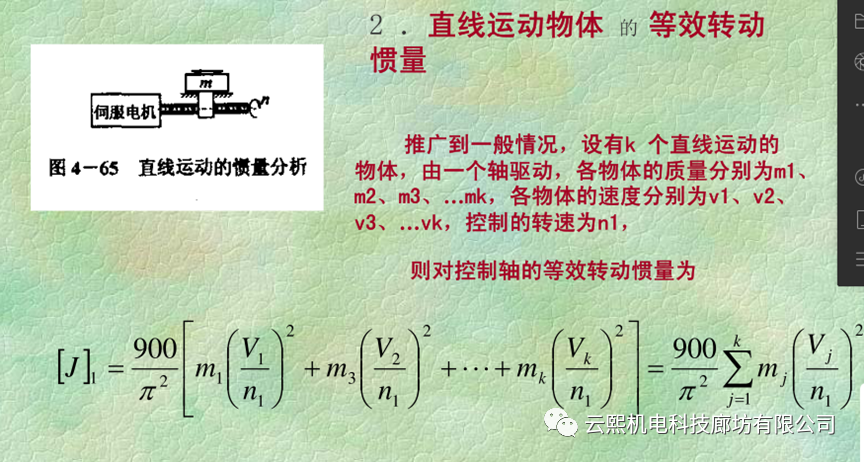
如果一個電機,即有旋轉運動又有直線運動,計算方法如下:
負載慣量與電機慣量匹配原則
負載慣量JL的大小對電機的靈敏度,系統精度和動態性能有明顯的影響,所以電機慣量Jm和負載慣量JL必須匹配。
不同類型的電機,匹配條件有所不同。
A)步進電機慣量匹配原則:
步進電機的啟動矩頻曲線是在電機空載下作出的,檢查其啟動能力時應考慮慣性負載對啟動頻率的影響,即根據啟動慣頻特性曲線找出其帶慣性負載的啟動頻率,在查其啟動轉矩和計算啟動時間。 當啟動矩頻曲線查不到帶慣性負載的啟動頻率時,可以用如下公式近似計算
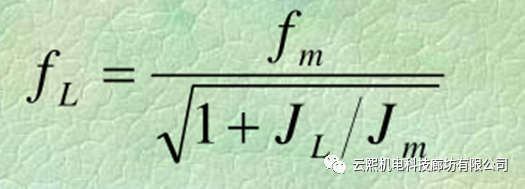
?L為帶慣性負載的最大自啟動頻率,?m為空載啟動最大頻率
JL為負載折算到電機軸上的轉動慣量,Jm為電機自身的轉動慣量
為了使步進電機具有良好的啟動能力及較快的響應速度,通常推薦JL/Jm≤4
從公式來看,當JL/Jm=3時,?L=0.5?m
B)直流伺服電機慣量匹配原則
直流伺服電機的慣量匹配與電機的種類及其應用場合有關,通常又分下面兩種情況
首先,對于采用慣量較小的直流伺服電機系統,通常推薦JL/Jm≤4
電機的伺服系統當JL/Jm≥3時,對電機的靈敏度和響應時間有很大的影響,甚至使伺服放大器不能在正常的范圍內工作。
小慣量伺服電機的慣量低達Jm≈0.005kg.M2,其特點是轉矩慣量比大,機械時間常數小,加速能力強,所以其動態性能好,響應快,但是,使用小慣量電機時容易發生對電源頻率的響應共振,當存在間隙,死區時,容易造成振動和蠕動。這才提出了慣量匹配原則。
其次,對于采用大慣量的直流伺服電機。通常推薦0.25≤JL/Jm≤4,所謂大慣量是相對小慣量而言的Jm≈0.1‐0.6kg.m2
大慣量寬調速直流電機的特點是慣量大,轉巨大,且能在低速下提供額定轉矩,常常不需要傳動裝置就與絲桿直接連接,而且受慣性負載的影響小,調速范圍大,大慣量直流伺服電機的熱時間常數長達100min,比小慣量電機熱時間常數一般為2-3min長得多,并允許長時間過載,其轉矩-慣量比高于普通電機小于小慣量電機,其快速性在使用上已經足夠。
另外交流伺服的慣量匹配與直流伺服電機的慣量匹配原則相似。
2)容量匹配
要根據系統負載的大小來確定伺服電機的容量,即電機的額定轉矩與被驅動的機械系統負載相匹配。選擇容量偏小的電機,則可能工作中出現帶不動的現象,或者電機發熱嚴重,導致電機壽命縮短 反之,選擇的電機容量過大,浪費了電機的能力,提高了成本。在進行容量匹配時,不同電機也存在不同的匹配方法
等效轉矩的計算
在機械運動與控制中,根據轉矩的性質將其分為:驅動轉矩Tm,負載轉矩TL,摩擦轉矩Tf和動態轉矩Ta(慣性轉矩)
Tm=TL+Tf+Ta
在伺服系統中,轉矩的匹配都是對特定軸(一般指電機)的,對特定軸的轉矩稱為等效轉矩。
如果力矩作用在特定軸上,就沒必要換算,否則必須換算成等效轉矩
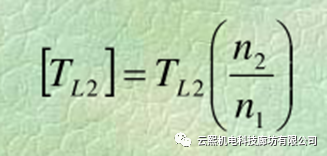
A)等效負載轉矩TL的計算
負載轉矩根據其特征,可分為工作負載和制動轉矩,這里只討論負載轉矩轉換成等效負載轉矩的算法
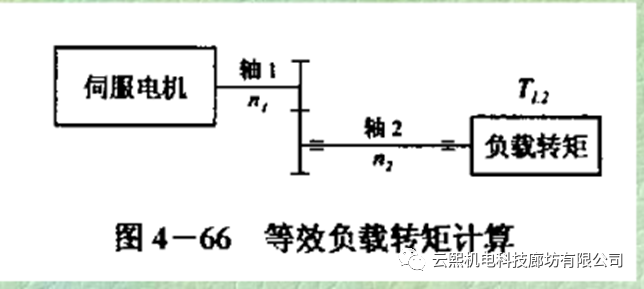
軸2上有負載,把它換算成位于電機軸(控制軸)的等效負載轉矩,
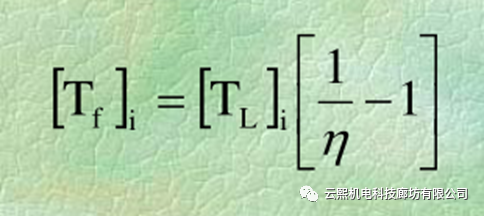
如果伺服系統有多個軸,

B)等效摩擦轉矩,控制精度要求不高,或者調整部分有富裕時,可根據類似機構估算機械效率η,由機械效率推算等效摩擦轉矩
C)等效慣性轉矩
伺服電機容量匹配的原則
A)步進電機
TL/Tmax≤4
TL為步進電機工作過程中,電機軸所受到的最大等效負載轉矩
Tmax為步進電機最大靜力矩
B)交流伺服和直流伺服電機容量匹配原則
3)速度匹配
同樣功率的電機,電機的額定轉速越高,電機體積越小。電機轉速越高,傳動比就會越大,這對減小伺服電機的等效轉動慣量,提高電機的負載能力有利,因此,在實際應用中,電機常工作在高轉速,低轉矩的狀態。
但是,實際應用中,伺服系統的機械裝置一般需要工作在低轉速,高扭矩的狀態,所以在電機和負載裝置之間,需要減速器匹配器,在某種程度上,伺服電機與機械負載的速度匹配就是減速器設計得問題
減速機的減速比不能過大,也不能過小。減速比太小,對于減小伺服電機的等效轉動慣量,有效提高電機負載能力不利;減速比太大,減速器的齒隙,彈性變形,傳動誤差等勢必會影響到系統的性能,精密減速機的成本也很高 因此根據系統的具體情況,在對負載分析的基礎上合理地選擇減速比,有關減速器的設計可以繼續學習
慣量系數
電機的規格選擇,低慣量還是高慣量?負載和電機之間的慣量匹配
低慣量=高加速度
牛頓定律高速我們,對于一個旋轉系統,
M=J*? M是轉矩,單位Nm,J是轉動慣量,單位kg.M2 , ?是角加速度,單位rad/S2
?=M/J 加速度=轉矩/慣量 由此慣量越小,加速度越大
低慣量電機特點:允許高動態系統
增加系統帶寬,也增加了負載和電機的不匹配
審核編輯 :李倩
-
控制器
+關注
關注
114文章
17065瀏覽量
183703 -
伺服系統
+關注
關注
14文章
586瀏覽量
40124
原文標題:伺服系統簡介
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
網絡化多電機伺服系統監控終端設計
伺服系統和PLC各自在什么場合使用
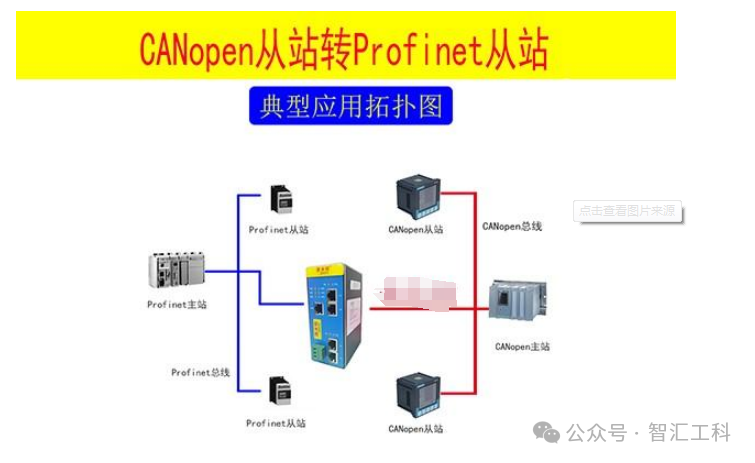
CANOpen轉PROFINET網關連接低壓伺服系統
電機控制器與伺服系統的關系
伺服系統智能化發展趨勢
伺服系統在CNC機床中的應用
伺服系統穩定性提升技術 伺服系統編碼器的工作原理
伺服系統在機器人中的作用 伺服系統與傳統電機對比
伺服系統調試技巧與注意事項
伺服系統與步進電機的區別 如何選擇合適的伺服系統
伺服系統工作原理解析 伺服系統在自動化中的應用
伺服系統基本概念和與變頻的關系
伺服控制系統的分類方式和常見伺服控制系統介紹






 工商網監
工商網監
評論