 介紹ICRA 2022中關于事件相機的幾篇文章
介紹ICRA 2022中關于事件相機的幾篇文章
本文介紹ICRA 2022中關于事件相機的幾篇工作,由于是關鍵字查找,可能有遺漏,且能力有限文章難免出現疏漏,請讀者批判性閱讀并指出問題。
[1]Asynchronous Optimisation forEvent-based Visual Odometry
本文面向純事件(不需要frame)和無地圖(map-free),提出了在SE(3)上的單目視覺里程計VO,核心思想是采用增量式最大后驗(MAP)優化。 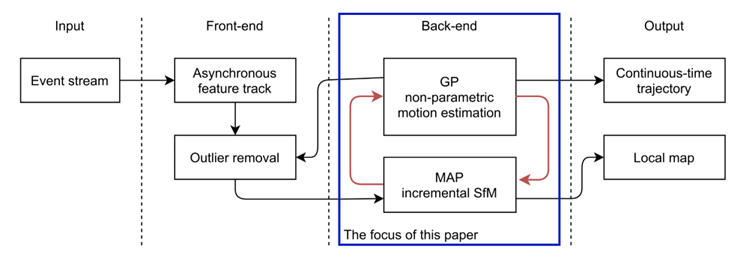 ?
?
上圖清晰指出了本文的主要貢獻,在SLAM框架中,針對后端的優化,采用增量式SfM和高斯過程(GP)迭代,計算出地圖和軌跡。本人認為,這個圖做的非常好,值得學習借鑒,非常直觀的告訴了讀者本文的主要工作。
圍繞后端的優化問題,文章在相關工作部分總結了優化時不同的batching策略,分成了frame-based(固定時間/數量)、event-driven(逐事件)和event-drivenand tracking(事件驅動和跟蹤的),見下圖。  ?
?
核心的算法涉及了較多數學知識,感興趣請查閱原文。但文章指出方法的缺陷是計算量較大(由于涉及了迭代等操作),在1min左右的數據上計算時間約10min。
[2] Learning Local Event-basedDescriptor for Patch-based Stereo Matching
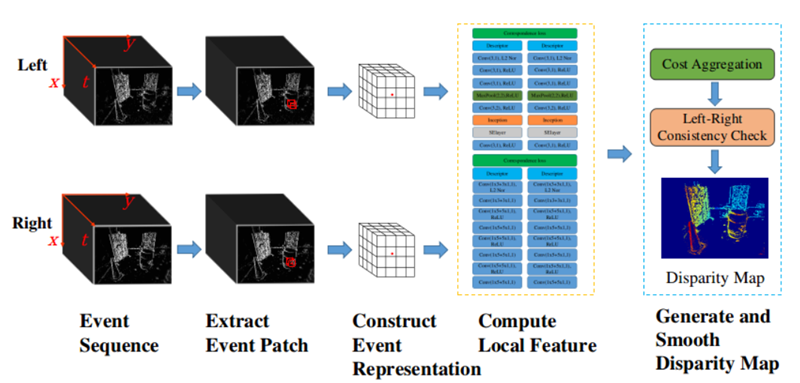
本文的主要工作是提出了兩種在雙目配準中event的編碼和配準方法。分別是“高效表示和網絡(Efficiency representation/Net)”以及“精準表示與網絡(Accuracyrepresentation/Net)”。
在表示上,高效表示采用了voxel-grid的方式進行切片,精準表示則將一段時間內的event生成6個channel的圖片:兩種極性的x-y,x-t,y-t圖。在配準網絡上,高效網絡采用了全2D卷積的方式提高計算速度,精確網絡則包含了Squeeze-and-Excitation層以提高特征的recalibration。
 ? ?
? ?
[3] Kinematic Structure Estimation ofArbitrary Articulated Rigid Objects for Event Cameras
本文解決的是rigid object的kinematic structure(KS)任務。對這個不太了解,我的理解是分析出剛體的結構并對其運動進行提取,如下圖。 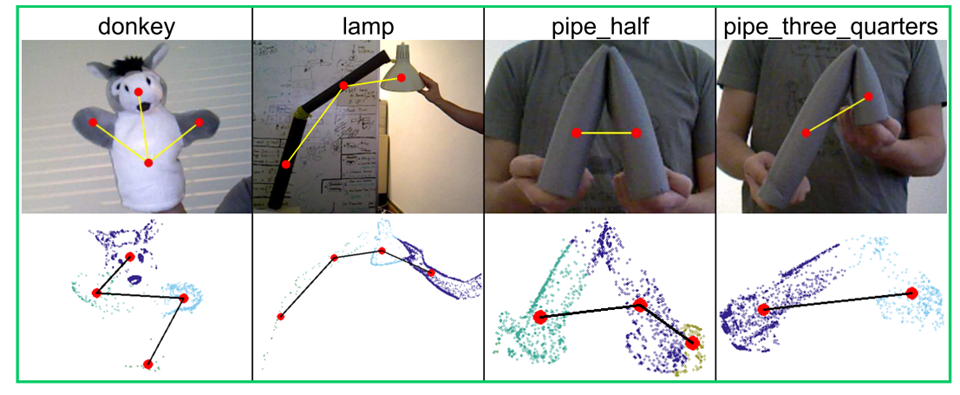 ?
?
核心算法是叫做“增量式基于事件的運動估計”,基本原理由這兩個作者在2020和21年兩篇文章中提出[A1][A2]。由于不了解,本推送不做展開介紹。
[4] Fusing Event-based and RGB camerafor Robust Object Detection in Adverse Conditions
提出了一種針對不同條件(主要是圖像質量降低)的融合frame和event的目標檢測算法。算法的核心是從RGB和event中提取特征,再經過FPN(FeaturePyramid Net)網絡進行融合,以實現不同尺度上的檢測。 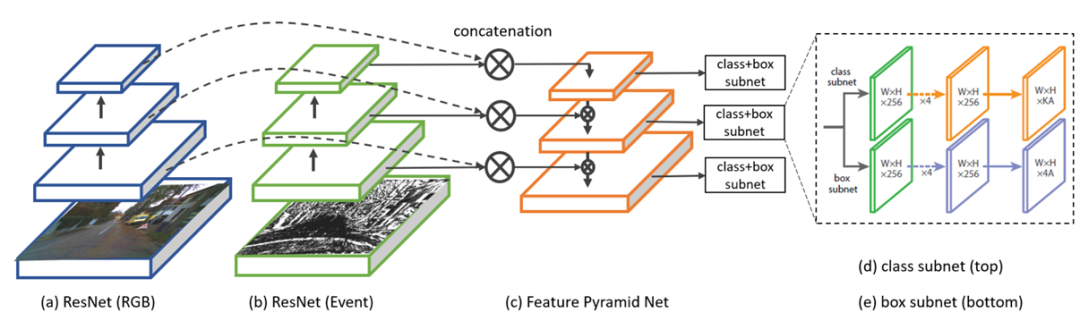 ?
?
從上圖可以看出,網絡結構很簡單,RGB圖采用了ResNet提取特征,Event通過voxel-grid的方式成圖后也提取特征,之后不同尺度的特征通過FPN進行檢測。
值得提一句的是,本文所提出的圖像質量降低是基于[A3]給出的圖像15種降質,包括噪聲、模糊、天氣和數字化四類。但作者實驗時,將DSEC數據集的圖片降質后使用,而并沒有處理event對應的數據,因此我認為存在不合理之處。但作者做了event-only實驗的對比,驗證了融合低質圖像的有效性。
另外,我最近看到了不少FPN網絡在event融合中的使用,各位可以關注下。
[5]A Linear Comb Filter for EventFlicker Removal
這篇文章很有趣,采用梳齒濾波器對事件的抖動進行去除,具體來說是消除了日光燈50hz頻閃產生的噪聲。作者是Ziwei Wang,熟悉的朋友應該知道她之前和Cedric有不少合作,基本上都是圍繞濾波的。
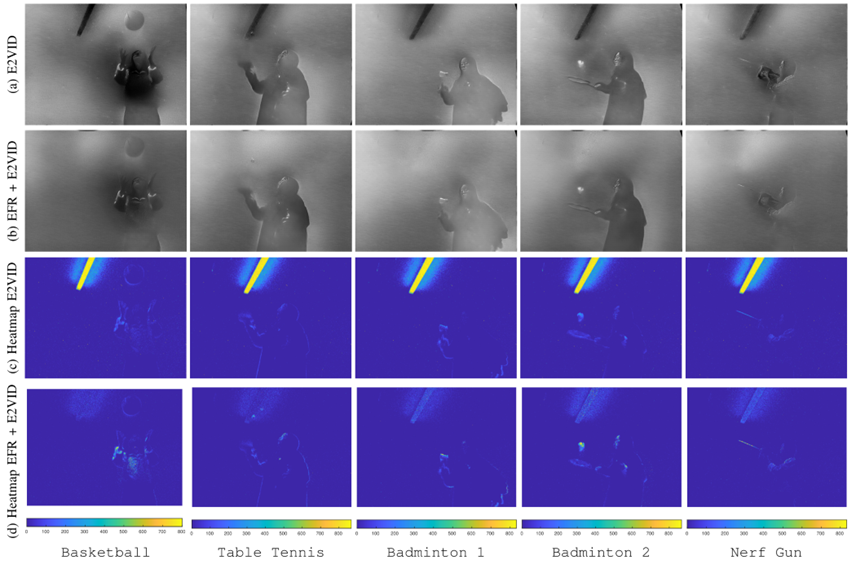
圖:日光燈頻閃前后的事件熱度圖(下)和重建圖(上) 文章的核心算法是“梳齒濾波器”,這種濾波器形似梳子,抑制特定頻率整數倍的信號,而對非特定頻率的信號影響不大。
作者提出了前向后向反饋的梳齒濾波器,抑制50hz的周期信號。所設計的系統框圖和伯德圖見下。 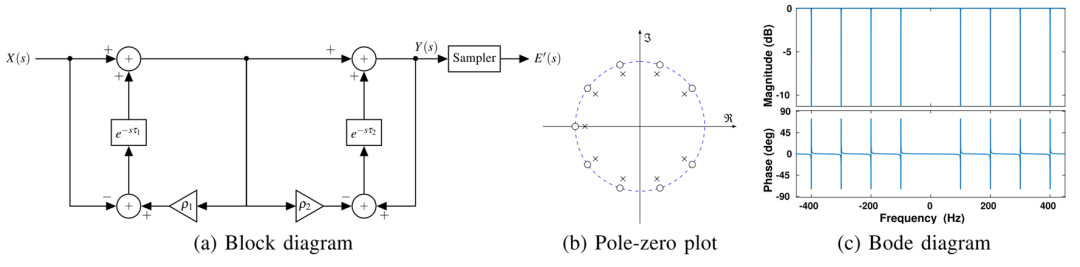 ?
?
文章很有趣,但我也指出兩個問題供讀者思考:1. 文章看起來需要保持相機和燈管相對靜止,如果有運動怎么辦,是否可以擴展?2. 從熱度圖上可以看出仍然沒有去除全部的噪聲,原因是什么,是否是由于事件的jitter或on/off的不一致造成的,是否可以優化?
[6] DEVO: Depth-Event Camera VisualOdometry in Challenging Conditions
本文提出了一種事件相機+深度相機的VO算法,基本思想是使用RGBD提供了深度,更方便地幫助event相機建立地圖與位姿估計。
關于這篇文章,今年2月在arxiv上看到了作者上傳的預印本,并在之前的推送中做了詳細介紹,本次推送不做展開。
[7] VISTA 2.0: An Open, Data-drivenSimulator for Multimodal Sensing and Policy Learning for Autonomous Vehicles
這篇文章并不算嚴格意義上的事件相機研究,只是做了個面向policy-learning的仿真器,涉及了event的生成。推送簡單介紹:文章提出了一種基于虛擬視角的方法,對現有的實際場景數據集進行合成,合成了不同視角下的image和Lidar,并利用改進的ESIM方法生成了event數據。做無人駕駛相關的朋友如感興趣可以進一步了解。
審核編輯:劉清
-
神經網絡
+關注
關注
42文章
4808瀏覽量
102819 -
多傳感器
+關注
關注
0文章
81瀏覽量
15584 -
SLAM
+關注
關注
24文章
435瀏覽量
32323
原文標題:ICRA2022中的事件相機
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA在ICRA 2025展示多項最新研究成果
如何在Visual Studio 2022中運行FX3吞吐量基準測試工具?
高光譜相機在農業監測中的應用
相機視野相關介紹
無法在Raspberry Pi 4中通過PyPI OpenVINO?安裝2022年運行時軟件包,為什么?
中達瑞和帶你了解高光譜相機和多光譜相機的區別以及如何選購
探索具身智能邊界,地瓜機器人邀你共戰ICRA 2025 Sim2Real挑戰賽

科學相機暗電流介紹

NVIDIA在ICRA展示最新機器人研究
求助,TIPL2022中的關于全差分放大器的疑問求解
熔池監控相機的原理是什么





 工商網監
工商網監
評論