") NVIDIA在ICRA展示最新機(jī)器人研究
NVIDIA在ICRA展示最新機(jī)器人研究

在 日前舉行的 IEEE 國際機(jī)器人和自動(dòng)化大會(huì)(ICRA)上,幾何織物(geometric fabrics)成為一個(gè)熱門的討論話題。幾何織物是 NVIDIA 機(jī)器人研究實(shí)驗(yàn)室成員與合作者共同提交的七篇論文的主題之一,并于 ICRA 上發(fā)表。
什么是幾何織物?
在機(jī)器人領(lǐng)域,經(jīng)過訓(xùn)練的策略本質(zhì)上是近似的。它們通常會(huì)正確行事,但有時(shí)也會(huì)使機(jī)器人移動(dòng)得太快、與物體發(fā)生碰撞或使機(jī)器人左右搖晃,所以無法保證會(huì)發(fā)生什么。
因此,每當(dāng)有人在物理機(jī)器人上部署經(jīng)過訓(xùn)練的策略,尤其是經(jīng)過強(qiáng)化學(xué)習(xí)訓(xùn)練的策略時(shí),他們都會(huì)使用一級(jí)低級(jí)控制器來攔截來自策略的命令,然后,他們會(huì)根據(jù)硬件的限制來轉(zhuǎn)換這些命令。
在訓(xùn)練 RL 策略時(shí),應(yīng)在訓(xùn)練過程中使用該策略運(yùn)行這些控制器。研究人員認(rèn)為,他們的 GPU 加速 RL 訓(xùn)練工具可以提供的一個(gè)獨(dú)特價(jià)值是將這些控制器矢量化,使其在訓(xùn)練和部署過程中都能使用,這正是這項(xiàng)研究的目的所在。
例如,研發(fā)人形機(jī)器人的公司可能會(huì)展示帶有低級(jí)控制器的演示,這些控制器不僅能平衡機(jī)器人,還能防止機(jī)器人的手臂撞到自己的身體。
研究人員用于矢量化的控制器來自于過去對(duì)幾何織物的研究。這篇題為《幾何織物:概括經(jīng)典力學(xué)以捕捉行為物理學(xué)》的文章在去年 ICRA 上獲得了最佳論文獎(jiǎng)。
DeXtreme 策略
研究人員在今年的論文中提到的手部操縱任務(wù)也來自著名的 DeXtreme 研究。
在這項(xiàng)新工作中,研究人員將這兩項(xiàng)研究合二為一,在將幾何織物控制器矢量化的基礎(chǔ)上訓(xùn)練 DeXtreme 策略,這將使機(jī)器人更加安全,能通過名義上的織物行為來指導(dǎo)策略學(xué)習(xí),并實(shí)現(xiàn)仿真到現(xiàn)實(shí)訓(xùn)練和部署的系統(tǒng)化,從而離在生產(chǎn)環(huán)境中使用 RL 工具更近一步。
該工作所創(chuàng)建的基礎(chǔ)架構(gòu),使研究人員能夠在訓(xùn)練期間通過快速迭代來獲得正確的域隨機(jī)化,從而成功進(jìn)行仿真到現(xiàn)實(shí)的部署。例如,通過在訓(xùn)練和部署之間快速迭代,研究人員可以調(diào)整織物結(jié)構(gòu)并在訓(xùn)練期間添加大量隨機(jī)擾動(dòng)力,實(shí)現(xiàn)遠(yuǎn)超先前工作的魯棒性水平。
在之前的 DeXtreme 工作中,現(xiàn)實(shí)世界的實(shí)驗(yàn)證明對(duì)物理機(jī)器人來說非常困難。機(jī)器人在實(shí)驗(yàn)過程中會(huì)發(fā)生電機(jī)和傳感器磨損情況,并改變底層控制行為。曾經(jīng)有一次,機(jī)器人甚至出現(xiàn)損壞并開始冒煙!
有了幾何織物控制器作為策略基礎(chǔ)并保護(hù)機(jī)器人,研究人員發(fā)現(xiàn)他們可以更自由地部署和測試策略,不必?fù)?dān)心機(jī)器人出現(xiàn)自毀現(xiàn)象。
如要了解更多信息,請(qǐng)參見幾何織物:策略學(xué)習(xí)的安全指導(dǎo)媒介或觀看DeXtreme 示例視頻。
ICRA 上的其他機(jī)器人研究
今年提交的其他值得關(guān)注的論文如下:
SynH2R
看不見但記得住
點(diǎn)云世界模型
SKT-Hang
SynH2R
SynH2R 的作者提出了一個(gè)框架,用于生成適合訓(xùn)練機(jī)器人的真實(shí)人類抓取動(dòng)作。如要了解更多信息,請(qǐng)參見:SynH2R:合成用于學(xué)習(xí)人機(jī)交接的手 - 對(duì)象運(yùn)動(dòng)。
看不見但記得住
RDMemory 的作者測試了機(jī)械臂對(duì)之前看到但后來被遮住的對(duì)象的反應(yīng),以確保它能夠在各種環(huán)境中做出可靠的反應(yīng)。這項(xiàng)工作同時(shí)用到了仿真和現(xiàn)實(shí)實(shí)驗(yàn)。
如要了解更多信息,請(qǐng)參見看不見但記得住:利用具有視頻追蹤功能的記憶模型對(duì)未觀測到的對(duì)象進(jìn)行推理和規(guī)劃或觀看RDMemory 示例視頻。
點(diǎn)云世界模型
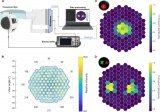
點(diǎn)云世界模型研究人員建立了一個(gè)新穎的點(diǎn)云世界模型(PCWM)和基于點(diǎn)云的控制策略。結(jié)果表明,這些策略可以提高機(jī)器人學(xué)習(xí)器的性能、縮短學(xué)習(xí)時(shí)間和增強(qiáng)魯棒性。
如要了解更多信息,請(qǐng)參見點(diǎn)云模型提高機(jī)器人學(xué)習(xí)器的視覺魯棒性。
SKT-Hang
SKT-Hang 作者研究的問題是如何使用機(jī)器人將各種物體掛到不同的支撐結(jié)構(gòu)上。雖然這個(gè)問題看似很容易解決,但物體形狀和支撐結(jié)構(gòu)的變化會(huì)給機(jī)器人帶來多重挑戰(zhàn)。
如要了解更多信息,請(qǐng)參見SKT-Hang:通過對(duì)象識(shí)別語義關(guān)鍵點(diǎn)軌跡生成技術(shù)來懸掛日常物體和/HCIS-Lab/SKT-Hang GitHub repo。
通過對(duì)象識(shí)別語義關(guān)鍵點(diǎn)軌跡生成技術(shù)來懸掛日常物體
具有手術(shù)精度的機(jī)器人
幾篇新的研究論文介紹了機(jī)器人在醫(yī)院手術(shù)環(huán)境中的應(yīng)用。
ORBIT-Surgical
ORBIT-Surgical 是一個(gè)基于物理學(xué)的手術(shù)機(jī)器人仿真框架,借助NVIDIA Omniverse平臺(tái)上的NVIDIA Isaac Sim實(shí)現(xiàn)逼真渲染。
它利用 GPU 并行化來訓(xùn)練強(qiáng)化學(xué)習(xí)和模仿學(xué)習(xí)算法,這些算法有助于研究機(jī)器人學(xué)習(xí),增強(qiáng)人類手術(shù)技能。它還能生成適用于主動(dòng)感知任務(wù)的逼真合成數(shù)據(jù)。研究人員演示了使用 ORBIT-Surgical 仿真轉(zhuǎn)現(xiàn)實(shí)功能將學(xué)習(xí)到的策略轉(zhuǎn)移到 dVRK 實(shí)體機(jī)器人上。
ORBIT-Surgical 的基礎(chǔ)機(jī)器人仿真應(yīng)用將以免費(fèi)開源軟件包的形式發(fā)布。
如要了解更多信息,請(qǐng)參見ORBIT-Surgical:一個(gè)用于學(xué)習(xí)如何提高手術(shù)靈巧性的開放仿真框架。
一個(gè)用于學(xué)習(xí)如何提高手術(shù)靈巧性的的開放仿真框架
DefGoalNet
DefGoalNet 論文重點(diǎn)介紹了形狀伺服控制,這是一項(xiàng)專門控制對(duì)象以創(chuàng)建特定目標(biāo)形狀的機(jī)器人任務(wù)。如要了解更多信息,請(qǐng)參見DefGoalNet:從可變形對(duì)象操縱演示中學(xué)習(xí)上下文目標(biāo)。
NVIDIA 機(jī)器人技術(shù)合作伙伴在 ICRA
NVIDIA 機(jī)器人技術(shù)合作伙伴在 ICRA 上展示了他們的最新開發(fā)成果。
總部位于蘇黎世的 ANYbotics 展示了其 ANYmal Research 項(xiàng)目,該項(xiàng)目提供一個(gè)讓用戶能夠訪問 ROS 系統(tǒng)底層控制的完整軟件包。ANYmal Research 是一個(gè)由數(shù)百名在頂尖機(jī)器人研究中心工作的研究人員組成的社區(qū),包括波士頓動(dòng)力 AI 研究所、蘇黎世聯(lián)邦理工學(xué)院和牛津大學(xué)等。
總部位于慕尼黑的 Franka Robotics 重點(diǎn)展示了與NVIDIA Isaac Manipulator的合作成果。這個(gè)基于NVIDIA Jetson的 AI 伴侶能夠?yàn)闄C(jī)器人控制和適用于 Matlab 的 Franka 工具箱提供助力。
Enchanted Tools 展示了其由 Jetson 驅(qū)動(dòng)的 Miroka? 機(jī)器人。
NVIDIA 機(jī)器人研究實(shí)驗(yàn)室位于西雅圖,重點(diǎn)研究機(jī)器人操縱、感知和基于物理學(xué)的仿真。該實(shí)驗(yàn)室隸屬于 NVIDIA 研究部門。NVIDIA 研究部門在全球擁有 300 多名頂尖研究人員,主要研究領(lǐng)域包括 AI、計(jì)算機(jī)圖形學(xué)、計(jì)算機(jī)視覺和自動(dòng)駕駛汽車等。
-
控制器
+關(guān)注
關(guān)注
114文章
17095瀏覽量
184121 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29718瀏覽量
212740 -
NVIDIA
+關(guān)注
關(guān)注
14文章
5304瀏覽量
106312
原文標(biāo)題:NVIDIA 在 ICRA 上展示幾何織物、手術(shù)機(jī)器人等最新機(jī)器人研究
文章出處:【微信號(hào):NVIDIA-Enterprise,微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
揭曉英偉達(dá)最強(qiáng)芯片!Blackwell Ultra、Rubin芯片亮相,新機(jī)器人壓軸
ABB推出三大全新機(jī)器人系列
NVIDIA技術(shù)助力歐洲廠商推出機(jī)器人系統(tǒng)與平臺(tái)
NVIDIA在ICRA 2025展示多項(xiàng)最新研究成果
借助NVIDIA技術(shù)實(shí)現(xiàn)機(jī)器人裝配和接觸密集型操作
NVIDIA推出適用于機(jī)器人的OpenUSD資產(chǎn)結(jié)構(gòu)管線

NVIDIA 通過云端至機(jī)器人計(jì)算平臺(tái)驅(qū)動(dòng)人形機(jī)器人技術(shù),賦能物理 AI

盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
探索具身智能邊界,地瓜機(jī)器人邀你共戰(zhàn)ICRA 2025 Sim2Real挑戰(zhàn)賽

新型復(fù)眼結(jié)構(gòu)有望革新機(jī)器人視覺系統(tǒng)
NVIDIA如何賦能機(jī)器人技術(shù)創(chuàng)新與應(yīng)用
使用NVIDIA Jetson打造機(jī)器人導(dǎo)盲犬
NVIDIA助力Figure發(fā)布新一代對(duì)話式人形機(jī)器人
NVIDIA與學(xué)術(shù)研究人員聯(lián)合開發(fā)手術(shù)機(jī)器人
NVIDIA 加速人形機(jī)器人發(fā)展






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論