") 如何防止光學(xué)像差/減少光學(xué)像差的負(fù)面影響
如何防止光學(xué)像差/減少光學(xué)像差的負(fù)面影響
什么是光學(xué)像差?
為了獲得最佳圖像質(zhì)量,必須校正鏡頭光學(xué)像差。如果沒有適當(dāng)校正,圖像最終會(huì)變模糊并丟失重要的圖像數(shù)據(jù)。本文重點(diǎn)介紹了六種光學(xué)像差,這些光學(xué)像差產(chǎn)生的原因,以及如何防止光學(xué)像差/減少光學(xué)像差的負(fù)面影響。
光學(xué)像差是指鏡頭設(shè)計(jì)上的缺陷,這種缺陷導(dǎo)致光線擴(kuò)散,而不是聚焦形成清晰的圖像,它包括圖像中的所有光線、僅某些點(diǎn)或邊緣失焦。成像時(shí)會(huì)出現(xiàn)多種類型的光學(xué)像差。制造一個(gè)可以校正所有潛在像差的理想視覺系統(tǒng)將會(huì)大幅增加鏡頭的成本。在實(shí)踐中,鏡頭總會(huì)存在某種形式的像差,但重要的是盡量減少像差的影響。因此,鏡頭設(shè)計(jì)制造通常都會(huì)做出一些妥協(xié)。
為了解釋像差如何使圖像模糊,首先需要解釋一下:什么是彌散圓?來自目標(biāo)的光點(diǎn)到達(dá)鏡頭然后會(huì)聚在傳感器上時(shí),圖像會(huì)很清晰。但是如果光點(diǎn)會(huì)聚于傳感器前后,則傳感器上的光線會(huì)廣泛分布、擴(kuò)散。圖1中可以看到這種情況,其中可以看到點(diǎn)光源會(huì)聚在傳感器上,但隨著傳感器位置的變化,沿傳感器散布的光量也會(huì)發(fā)生變化。
光線越分散,圖像就越無法聚焦。除非光圈很小,否則圖像中距離較遠(yuǎn)的目標(biāo)通常會(huì)使背景或前景失焦。這是因?yàn)樵谇熬爸袝?huì)聚的光會(huì)與來自背景中較遠(yuǎn)目標(biāo)的光在不同的點(diǎn)上聚焦。
如需了解更多在視覺系統(tǒng)中利用光圈優(yōu)勢的信息,請閱讀Teledyne Lumenera的博文《通過鏡頭光圈優(yōu)化提高成像系統(tǒng)性能》(文章鏈接:https://www.lumenera.com/blog/improving-imaging-system-performance-with-lens-aperture-optimization)。
彗 差 彗差會(huì)導(dǎo)致應(yīng)聚焦為圖像中一個(gè)點(diǎn)的光變成光錐。由于出現(xiàn)了彗差,從鏡頭不同部位進(jìn)入的光線在沿傳感器所在圖像平面聚焦的位置會(huì)越來越遠(yuǎn)。 以一定角度進(jìn)入鏡頭的光線會(huì)導(dǎo)致光線在圖像平面上形成不斷擴(kuò)大的彌散圓軌跡。如圖2所示,這可能會(huì)導(dǎo)致擴(kuò)大的光線軌跡影響任何試圖成像的點(diǎn)光源。在圖2頂部,彗差圖像可以看作是向下擴(kuò)大的彌散圓的點(diǎn)光源,形成一個(gè)錐形圖像。這通常是光學(xué)元件未對(duì)準(zhǔn)的結(jié)果。
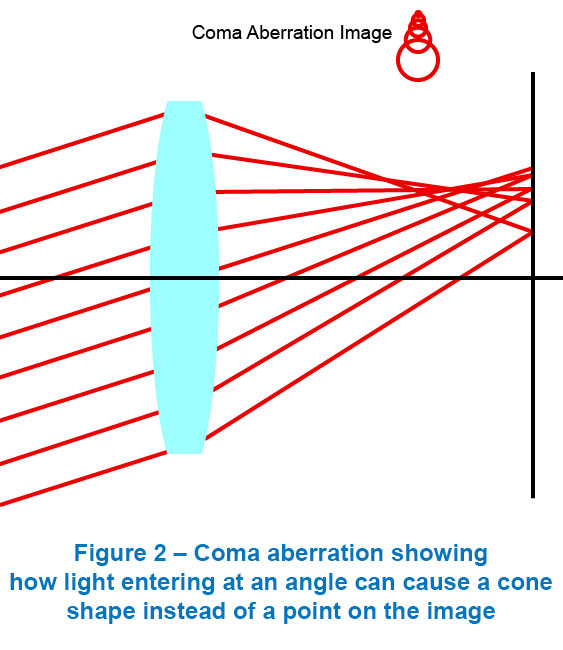
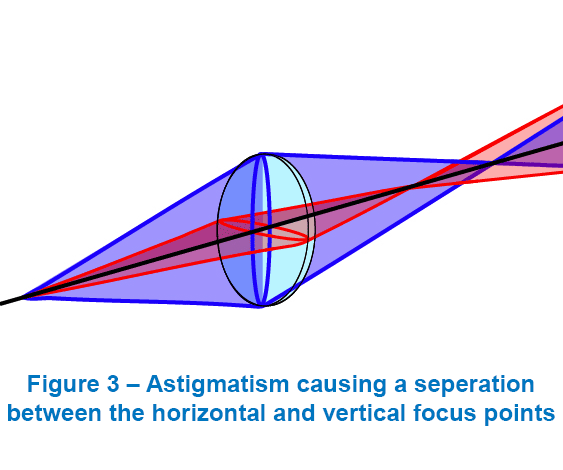
彗差發(fā)生在點(diǎn)光源中,例如恒星,因此彗差是天文攝影中特別重要的像差。減小光圈可以消除一些會(huì)引起這種效果的光線,但是對(duì)于天文攝影來說,減小光圈會(huì)消除很多成像必需的主題元素。在這種情況下,需要有專門的彗差校正設(shè)計(jì)鏡頭。散 光 在兩個(gè)垂直平面上傳播的光線聚焦于不同點(diǎn)時(shí)會(huì)產(chǎn)生散光。從圖3中可以看到,其中兩個(gè)焦點(diǎn)分別用紅色水平面和藍(lán)色垂直面表示。圖像中的最佳清晰度點(diǎn)將位于這兩個(gè)點(diǎn)之間,其中一個(gè)平面的彌散圓寬度并不大。當(dāng)光學(xué)元件未對(duì)準(zhǔn)時(shí),散光會(huì)導(dǎo)致圖像的側(cè)面和邊緣出現(xiàn)失真。散光通常被描述為查看圖像中的線條時(shí)缺乏清晰度。彗差和散光通常是鏡頭系統(tǒng)內(nèi)部光學(xué)元件發(fā)生類似未對(duì)準(zhǔn)的結(jié)果。散光加劇時(shí),肯定也會(huì)發(fā)生彗差。
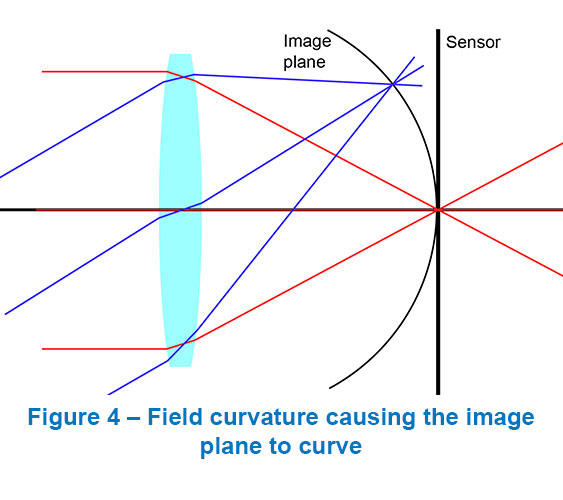
這種形式的像差可以使用大多數(shù)優(yōu)質(zhì)光學(xué)元件中的適當(dāng)鏡頭設(shè)計(jì)來進(jìn)行校正。用于固定散光的光學(xué)元件最初由卡爾蔡司操刀設(shè)計(jì),并且已經(jīng)有了一百多年的發(fā)展歷史。如今通常只有劣質(zhì)鏡頭才會(huì)出現(xiàn)這種情況,或者在鏡頭掉落導(dǎo)致內(nèi)部光學(xué)元件發(fā)生損壞或位移的情況下才會(huì)發(fā)生。(珀茲伐)場曲 許多鏡頭都有圓形焦點(diǎn)場。這可能會(huì)導(dǎo)致圖像出現(xiàn)軟角,并主要使圖像中心處于聚焦位置。然而,大多數(shù)鏡頭都有些圓形的焦點(diǎn),如果不進(jìn)行裁剪,就無法聚焦整個(gè)圖像。因?yàn)榇蠖鄶?shù)鏡頭光學(xué)元件都有曲面。場曲是多個(gè)焦點(diǎn)導(dǎo)致圖像平面不平產(chǎn)生的結(jié)果。圖4顯示圖像平面為曲面,因?yàn)槊總€(gè)焦點(diǎn)都位于垂直于光軸的不同平面上。用一條線連接這些點(diǎn)時(shí),會(huì)顯示出一個(gè)曲面。光線離開光軸進(jìn)入鏡頭后,焦點(diǎn)并沒有聚焦在傳感器上。
相機(jī)鏡頭已在很大程度上對(duì)此進(jìn)行了校正,但許多鏡頭可能會(huì)存在一些場曲。有些傳感器制造商實(shí)際上正在開發(fā)可校正彎曲焦點(diǎn)的彎曲傳感器。這種設(shè)計(jì)將允許傳感器校正像差,無需采用具備高精度的、費(fèi)用高昂的鏡頭設(shè)計(jì)。采用這種類型的傳感器,可以使用價(jià)格更實(shí)惠的鏡頭來產(chǎn)生高質(zhì)量的結(jié)果。開普勒空間天文臺(tái)實(shí)際就采用了這種傳感器,其中彎曲傳感器陣列用于校正望遠(yuǎn)鏡的大型球面光學(xué)元件。 如需了解開普勒望遠(yuǎn)鏡的更多信息,請?jiān)L問https://www.nasa.gov/mission_pages/kepler/main/index.html。失 真 失真是指圖像向圖像幀的邊緣和側(cè)面扭曲。焦距極長或極短的鏡頭的失真效果可能最為突出。兩種最常見的失真形式是桶形失真和枕形失真。
桶形失真
桶形失真(又稱桶形畸變)的圖像邊緣和側(cè)面遠(yuǎn)離中心彎曲。這在視覺上看起來像是圖像中心外凸,因?yàn)樗东@到了彎曲視野(FoV)的外觀。例如,當(dāng)在高層建筑的高處使用較短焦距的鏡頭(又稱“廣角鏡頭”)時(shí),可以捕獲更寬的FoV。當(dāng)使用產(chǎn)生極度扭曲和寬FoV的魚眼鏡頭時(shí),F(xiàn)oV會(huì)實(shí)現(xiàn)最夸張的效果,如圖5所示。在這張圖像中,網(wǎng)格線用于幫助說明失真效果如何使圖像向靠近側(cè)面和邊緣的地方拉伸。
進(jìn)入鏡頭的光線偏離光軸并導(dǎo)致桶形失真。使用廣角鏡頭可形成更大的成像區(qū)域,F(xiàn)oV會(huì)更寬,這種情況所帶來的優(yōu)點(diǎn)可能比圖像各端出現(xiàn)的像差更重要。應(yīng)該注意的是,有直線鏡頭可以補(bǔ)償桶形失真并拉直FoV。這對(duì)于使用短焦距進(jìn)行圖像分析很重要。 對(duì)于需要寬FoV以更好捕獲景觀的航空成像,使用極短焦距的替代方法是使用多臺(tái)并排相機(jī)。由于大范圍成像最重要的因素是傳感器的像素寬度,而非相機(jī)的全分辨率,同時(shí)使用多臺(tái)相機(jī)捕獲圖像可能會(huì)實(shí)現(xiàn)很好的效果。Teledyne Lumenera白皮書《在航空成像中使用單臺(tái)相機(jī)還是多臺(tái)相機(jī)》(下載鏈接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Using_Single_vs_Multi_Cameras_in_Aerial_Imaging-White_Paper.pdf)中對(duì)此進(jìn)行了進(jìn)一步探索。 然而,在某些高度可以采用多臺(tái)相機(jī)并排方式,但在大多數(shù)情況下,在某個(gè)高度,相機(jī)將需要更長的焦距才能實(shí)現(xiàn)對(duì)更遠(yuǎn)目標(biāo)的清晰成像。因此,廣角鏡頭可以為航空成像或精準(zhǔn)農(nóng)業(yè)等其他應(yīng)用拍攝更多細(xì)節(jié),但需要考慮高度要求。關(guān)鍵因素是視覺系統(tǒng)所需的地面采樣距離(GSD)。在相機(jī)固定且相機(jī)高度保持不變的環(huán)境中(例如溫室),使用廣角鏡頭有助于對(duì)大部分目標(biāo)環(huán)境進(jìn)行成像。如需了解更多關(guān)于GSD以及如何建立航空成像系統(tǒng)的信息,請閱讀Teledyne Lumenera的博文《航空成像的挑戰(zhàn):實(shí)現(xiàn)清晰、銳利的成像》(文章鏈接:https://www.lumenera.com/blog/the-challenge-of-aerial-imaging-achieving-a-clear-and-sharp-image)。
枕形失真
當(dāng)光線通過枕形失真(又稱枕形畸變)向光軸彎曲時(shí),圖像似乎向中間“收縮”。因此,圖像的邊緣和側(cè)面看起來會(huì)向圖像中心彎曲,如圖6所示,其中網(wǎng)格線越往中心彎曲,延伸越遠(yuǎn)。 這種形式的像差最常見于焦距較長的遠(yuǎn)攝鏡頭。遠(yuǎn)攝鏡頭將放大圖像中的目標(biāo),焦距越長,最終圖像裁剪和縮放程度就越高。與其他像差一樣,該因素主要影響圖像的邊緣和側(cè)面。因此,保持圖像清晰的最簡單方法是采用較小的鏡頭光圈。在圖6中,圖像的中心保持原樣,未發(fā)生失真,因此使用較小的光圈,最終可以阻擋從邊緣處進(jìn)入的失真光線。
復(fù)雜失真
復(fù)雜失真(又稱胡子畸變)是融合上述桶形失真和枕形失真而成的復(fù)雜畸變。胡子畸變會(huì)導(dǎo)致圖像內(nèi)部向外彎曲,圖像外部向內(nèi)彎曲。這是一種很罕見的畸變,其中影響圖像成像質(zhì)量的畸變不止一種。胡子畸變通常表明鏡頭設(shè)計(jì)非常差,因?yàn)檫@種畸變產(chǎn)生的原因在于光學(xué)錯(cuò)誤導(dǎo)致像差融合。散 焦 幾乎所有用過相機(jī)的人都熟悉散焦像差。當(dāng)圖像只發(fā)生失焦時(shí),就會(huì)出現(xiàn)散焦像差。圖像清晰度和對(duì)比度降低會(huì)導(dǎo)致細(xì)節(jié)隨著鏡頭逐步換景而變得更加模糊。 通常原因在于圖像中沒有目標(biāo)位于目標(biāo)發(fā)射或反射的光聚到傳感器的位置。這意味著光線將在距離傳感器很遠(yuǎn)不同圖像平面上聚焦,從而導(dǎo)致圖像完全模糊。如圖7所示,所有光線都將形成很大的彌散圓,導(dǎo)致圖像完全失焦。
如需解決散焦問題,只需調(diào)整鏡頭的焦距或相機(jī)的位置,直到目標(biāo)清晰聚焦。但是,在某些條件下,相機(jī)無法聚焦于特定目標(biāo)。通常原因在于距離,主體離鏡頭太近或太遠(yuǎn)。在無法聚焦的情況下,可能需要使用不同的相機(jī)鏡頭來改變焦距和最小焦距。或者縮小光圈也可以讓鏡頭聚焦在更遠(yuǎn)的其他目標(biāo)上,有效增加景深,即保持對(duì)焦的最近和最遠(yuǎn)目標(biāo)之間的距離。 如需了解視覺系統(tǒng)所需焦距類型,請閱讀Teledyne Lumenera的白皮書《正確使用鏡頭:選擇視覺系統(tǒng)鏡頭》(下載鏈接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Selecting_a_Lens_for_a_Vision_System-White_Paper.pdf)。色 差
縱向/軸向像差(也稱縱向/軸向色差)
光的顏色代表一種特定波長的光。彩色圖像將有多個(gè)波長進(jìn)入鏡頭并由于折射而聚焦在不同的點(diǎn)。縱向或軸向色差產(chǎn)生的原因是不同波長光線沿光軸在不同點(diǎn)聚焦。波長越短,其焦點(diǎn)就越靠近鏡頭,而波長越長,則會(huì)發(fā)生相反情況,即焦點(diǎn)離鏡頭越遠(yuǎn),如圖8所示。采用更小的光圈,進(jìn)入鏡頭的光線可能仍會(huì)聚焦在不同的點(diǎn),但“彌散圓”的寬度(直徑)會(huì)大幅減小,避免圖像模糊嚴(yán)重。
橫向/側(cè)向像差(又稱橫向/側(cè)向色差)
導(dǎo)致不同波長沿圖像平面分布的離軸光為橫向或側(cè)向色差。這種像差會(huì)導(dǎo)致圖像主體邊緣形成彩色邊紋。校正難度比縱向色差更高。
可以使用產(chǎn)生不同折射率的消色差雙合透鏡來解決這個(gè)問題。將可見光譜的兩端聚焦在同一個(gè)焦點(diǎn)上,可以去除彩色邊紋。對(duì)于橫向和縱向色差,減小光圈大小也有助于解決這一問題。此外,建議最好不要在高對(duì)比度環(huán)境(即背景非常亮的圖像)中對(duì)目標(biāo)進(jìn)行成像。顯微鏡中可以使用復(fù)消色差(APO)的鏡頭來代替消色差鏡頭,消色差鏡頭利用三個(gè)透鏡元件來校正入射光的所有波長。當(dāng)顏色成為關(guān)鍵要素時(shí),確保減少色差將會(huì)產(chǎn)生最佳效果。
底 線
隨著傳感器像素越來越高,鏡頭設(shè)計(jì)中的缺陷會(huì)隨著更嚴(yán)重的像差變得更加明顯。有幾種類型的像差,這些像差的共同點(diǎn)是會(huì)模糊邊緣附近的圖像。 改善圖像聚焦以使更多FoV處于聚焦點(diǎn)的最簡單方法是采用較小的鏡頭光圈。在發(fā)生輕微像差的情況下,這一方案一般為首選解決方案。該方案將提供更長的景深,但同時(shí)也會(huì)降低圖像的亮度。因此,只有在照明充足時(shí),該解決方案才可行。 但鏡頭系統(tǒng)內(nèi)的光學(xué)元件可能會(huì)出現(xiàn)偏差。在像差非常強(qiáng)的情況下,仔細(xì)查看相機(jī)鏡頭的內(nèi)部光學(xué)元件可能是唯一的解決方案。為避免出現(xiàn)這種情況,鏡頭應(yīng)始終輕拿輕放,并進(jìn)行固定,以避免遭受過度沖擊或振動(dòng)。有些像差問題可以通過調(diào)整鏡頭的內(nèi)部光學(xué)元件來修復(fù),但需要大量的精密工作,并且只建議由訓(xùn)練有素的專業(yè)人員進(jìn)行精密修復(fù)。 需要注意的是,另一種常見的像差是球面像差(球差)。由于球面透鏡元件的形狀為曲面,光線越靠近曲面邊緣,就會(huì)以更陡峭的角度彎曲,導(dǎo)致光線沿著光軸聚焦在不同的點(diǎn)上。
審核編輯 :李倩
-
圖像
+關(guān)注
關(guān)注
2文章
1092瀏覽量
41035 -
光圈
+關(guān)注
關(guān)注
1文章
45瀏覽量
12399 -
光學(xué)
+關(guān)注
關(guān)注
4文章
785瀏覽量
36996
原文標(biāo)題:如何獲取更出色的視覺成像?詳解六種光學(xué)像差影響因素
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
SOL 成像光譜儀散光校正

球面波的像差效應(yīng)對(duì)焦點(diǎn)的影響
VirtualLab Fusion:平面透鏡|從光滑表面到菲涅爾、衍射和超透鏡的演變
PanDao:光學(xué)設(shè)計(jì)中的光學(xué)加工鏈建模
PanDao:光學(xué)設(shè)計(jì)階段透鏡系統(tǒng)的可生產(chǎn)性分析
Vicor助力Microgate開發(fā)創(chuàng)新自適應(yīng)光學(xué)技術(shù)
PanDao:光學(xué)加工評(píng)估
VirtualLab 應(yīng)用:反射式金字塔波前傳感器的仿真
VirtualLab Fusion應(yīng)用:漸變折射率(GRIN)鏡頭的建模
VirtuaLab Fusion:從光線光學(xué)到物理光學(xué)的無縫轉(zhuǎn)換
GLAD應(yīng)用:大氣像差與自適應(yīng)光學(xué)
離軸光學(xué)系統(tǒng)的優(yōu)勢





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論