 靈活、以數據為中心的無人機平臺簡化了任務適應
靈活、以數據為中心的無人機平臺簡化了任務適應
由于無人駕駛飛行器(UAV)總是為特定任務而設計的,因此一旦建造和部署,它們往往難以適應任務的變化。構建易于適應不同任務參數的無人機需要一種新的無人機架構平臺方法。最大的優勢是在運營階段顯著節省了成本、復雜性和時間。
構建無人機平臺的部分技術挑戰是提供支持這種方法的集成框架。這種集成框架可以通過使用中間件來實現,以從無人機的各個組件中抽象出點對點數據傳輸的細節。這種類型的中間件已被創建為實時系統數據分發服務(DDS),這是由對象管理組(OMG)發布的標準,目前用于無人機和地面站的實現。
將無人機用于各種國防和商業目的的動力日益增長,暴露了傳統設計策略的弱點和局限性。由于無人機總是為特定任務而設計的,因此一旦建造和部署,它們往往難以適應任務的變化。一套新的任務配置文件需要設計另一架無人機。因此,隨著時間的推移,制造商和用戶組織必須維護多個無人機系統的生產和支持線,所有這些系統都具有通用架構,但需要不同的性能,連接性或數據特征。
理想情況下,兩到三個無人機設計可以作為平臺,可以很容易地適應各種不同的任務。這些平臺將通過其物理特性(例如發電廠,機身和燃料容量)進行區分,并具有互補的硬件和軟件。為了實現任務靈活性,組件應在平臺上可現場更換和熱插拔,而不會造成中斷。軟件基礎結構應提供自動發現和配置,以便可以在實時系統上動態添加和刪除組件,并立即識別并與系統集成。此外,節點應該能夠在發生故障后隨時重新啟動,并且應用程序應該能夠以任何順序啟動。
從概念上講,這個想法很容易理解,但從技術上講,使用當前的設計原則無法輕松實現。如今,每種車輛設計都需要一個專用的地面站,該地面站集成良好但價格昂貴。無人機飛行軟件通常針對每輛新車輛重新設計,有時甚至針對同一車輛上的不同任務或有效載荷進行重新設計。建造一種能夠適應不同任務參數的無人機似乎并不可行。
相反,它需要一個新的系統設計和實現架構 - 一個既能提供功能又能靈活地承擔多個角色和任務的架構,而無需返回繪圖板進行大量修改。將此視為無人機設計的“平臺方法”。就其本身而言,無人機平臺并不是任何單一任務配置文件的專家。當配置適當的硬件和軟件時,少量的無人機平臺可能能夠有效地為各種不同的任務提供服務,而DDS中間件是這個多任務框架的關鍵。
可配置的無人機平臺降低了復雜性
可配置無人機平臺在完成多項任務方面的成功有可能影響整個無人機產品生命周期。設計和實現可能不那么復雜,因為該平臺在概念上和技術上都更簡單。設計參數會改變,因為需要支持范圍更廣的任務,但總體上應該變得不那么復雜。
最大的優勢很可能在生命周期的運營階段看到。首先,需要支持的無人機型號將減少 - 也許是兩個或三個平臺,而不是十幾個或更多不同的型號。這使得配置更簡單、更便宜,庫存管理變得不那么復雜。但最終它降低了支持的復雜性和成本,因為一個地面站可以為平臺提供服務,而不需要為每個單獨的無人機模型提供單獨的地面配置。由于無人機平臺本身沒有為任何特定任務配置文件配備,因此可能需要更多的組件和技術支持才能將無人機平臺重新配置為特定的角色和任務。然而,這將被支持和配置更少的無人機模型以及設計和實現架構上更簡單的無人機平臺所獲得的優勢所抵消。
集成框架連接解決了挑戰
達到無人機設計可以作為多任務平臺的程度是一項重大的技術挑戰。這一挑戰的很大一部分是提供支持這一概念的集成框架。如今,無人機的實施是由儀器、數據采集設備、控制表面和地面控制站之間的專用硬連線連接驅動的。雖然此配置可以保證需要數據進行實時響應的組件之間的數據可用性,但當存在多個互連時,它變得復雜。
此外,硬連線配置具有很強的抗更改性。例如,如果將來由于新的儀器,子系統或傳感器而增加帶寬要求,則可能無法在該無人機上獲得所需的性能或可用性保證。事實上,這是無人機傾向于針對特定任務的原因之一。
相反,真正的平臺可以容納所有可能的數據源和消費者之間的完全互連。乍一看,這可能非常復雜,因為沒有先入為主的數據路徑,網絡帶寬或時間確定性概念。即使可以設計和構建這樣的配置,似乎也不能保證可用帶寬能夠滿足任何給定儀器組合的實際性能和實時要求。
平臺還需要能夠為任何可能的配置提供必要的帶寬、性能和保證。當然,為了實現這一點,總有一些情況需要權衡取舍,但例如,對于多特派團一體化框架來說,性能、可靠性和實時確定性之間的技術權衡應該既是可能的,也是合理的。
通過 DDS 實現以數據為中心的體系結構
這種集成框架可以通過使用軟件層或中間件來實現,該軟件層或中間件將點對點數據傳輸的細節從無人機的各個組件中抽象出來。通過這樣做,該中間件可以提供輕松添加新硬件和應用程序的能力,使用多個可用路由使數據可用以確保實時可用性,支持多種傳輸協議,并提供針對特定配置和任務的調整。
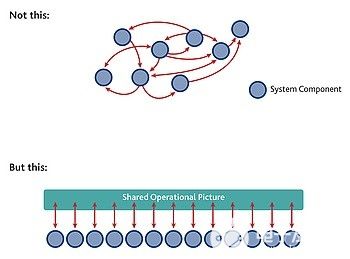
這種類型的軟件層已創建為實時系統的數據分發服務,這是由對象管理組發布的標準。數據分發服務使用發布-訂閱通信模型使數據創建者能夠將數據發布到基礎結構,并允許數據使用者訂閱來自此數據基礎結構的數據。DDS 發布-訂閱模型自動將信息生產者(發布者)與信息消費者(訂閱者)連接起來。通信在空間(節點可以在任何地方)、時間(交付可能在發布后立即或稍后)和流程(交付可以可靠地進行,調整到可用帶寬)中解耦。
在 DDS 實現中,數據從物理源和目標中抽象出來,并可供訂閱它的任何應用程序訪問,而與源的位置和傳輸數據的特定鏈路技術無關(圖 1)。由于 DDS 耦合是松散且匿名的,因此可以在運行時定義、創建和銷毀通信路徑。此外,DDS實現會自動“發現”請求發布者和訂閱者,在運行時在它們之間建立連接,而無需以前的配置。DDS 還支持整個網絡容錯所需的數據彈性。
圖 1
此外,在考慮我們的多任務無人機平臺時,DDS標準定義了一套全面的服務質量(QoS)參數。由于可能存在設計權衡,工程師可以在性能、可靠性、確定性和其他影響系統執行其任務能力的因素之間配置平衡。DDS QoS 參數指定組件與整個模型的屬性以及數據傳輸本身之間的耦合程度。
DDS 包括可靠性、持久性、截止日期、優先級和數據所有權等 QoS 參數。通過調整QoS參數,系統和應用軟件開發人員將能夠確保數據傳輸和接收滿足每個系統和應用的獨特需求。可以在運行時更改 QoS 參數設置,支持特定任務的重新配置,而無需重新構建應用軟件。豐富的 QoS 參數集使得在各種處理器和網絡(包括嵌入式處理器和網絡)上實現 DDS 成為可能。
DDS 從根本上說是設計用于不可靠的傳輸,例如 UDP 或無線網絡。任何設施都不需要中央服務器或特殊節點。所有通信(包括發現)都是嚴格對等的,并且可以選擇采用多播來提高效率和可擴展性。
示例:以數據為中心的集成基礎
考慮一個使用DDS實現設計的無人機,作為支持大部分可互換硬件和應用程序的軟件集成平臺。將DDS中間件作為數據通信的基礎,可以為實際有效負載提供極大的靈活性。它可以專注于傳感器和數據記錄儀器,確保連續的數據流可用于記錄和分析數據。或者,它可以專注于實時通信,確保可靠和確定地交換進出地面站的遙測數據。創建平臺后,工程師可以仔細查看 QoS 權衡,以確保滿足系統數據可用性要求。可以在運行時更改 QoS 設置,以滿足特定的任務要求。
無人機設計中的新興用途
DDS目前用于無人機和地面站的實施。例如,DDS中間件是通用原子高級駕駛艙地面控制站(GCS)的基礎。GCS網絡系統集成了控制和信息顯示,合成視頻和融合的態勢感知數據。
DDS中間件構成了該站的軟件通信骨干。DDS 發布-訂閱架構簡化了通信的系統集成。例如,任何系統組件都可以訂閱傳入的飛機遙測流,例如緯度和經度、俯仰、滾動和空速參數。例如,它還允許用戶連接多個工作站,允許一個站點的飛行員與另一個站點的傳感器操作員密切合作。
作為另一個例子,原位掃描鷹長航時無人機在車輛本身和地面控制站中使用DDS(圖2)。在機身上,DDS連接飛行計算機,傳感器和機載應用計算機。在地面站內,DDS連接解碼數據饋送的系統,分析無人機的情況,并與操作員控制接口。DDS實現了具有良好控制數據流的分層控制網絡。例如,這使得Insitu能夠在多個地面站之間無縫切換控制,并通過不可靠的低帶寬鏈路可靠地連接到飛機。
圖 2

DDS QoS的可配置性也使其非常適合有損網絡,例如車輛和地面站之間的無線連接可能遇到的網絡。
當然,DDS并不能解決圍繞實施靈活無人機平臺的所有挑戰。設備和有效載荷重量、空氣動力學平衡、成本和功耗等因素將驅動不同的無人機平臺,即使采用靈活且響應迅速的集成模型也是如此。但鑒于DDS標準在抽象和管理實時數據流方面的功能,它可以為構建多用途無人機平臺提供基本方法。
審核編輯:郭婷
-
無人機
+關注
關注
230文章
10742瀏覽量
185609 -
UAV
+關注
關注
0文章
25瀏覽量
12009
發布評論請先 登錄
無人機轟炸機場中使用的通信技術

光伏電站無人機巡檢系統平臺的設計架構

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
無人機自動巡檢系統功能與應用
MOS 管在無人機電池中的關鍵應用

半導體制冷模組賦能無人機巢:無人機效能 “熱”?點突破

DIY了一臺無人機,用全志T113芯片
開源項目!DIY了一臺無人機,用全志T113芯片
光伏電站無人機智能巡檢平臺






 工商網監
工商網監
評論