 關于工業機器人與plc通訊鏈接的基礎知識
關于工業機器人與plc通訊鏈接的基礎知識
—— PLC通訊的接口 ——
RS-232在1962命名為EIA-232-E,作為工業標準,以保證不同廠家產品之間的兼容。
RS-422由RS-232衍生,主要是為了彌補RS-232之不足。RS-422是一種單機發送、多機接收的單向、平衡傳輸規范,被命名為TIA/EIA-422-A標準。為改進RS-232通信距離短、速率低的缺點,RS-422定義了一種平衡通信接口,將傳輸速率提高到10Mb/s,傳輸距離延長到4000英尺(速率低于100kb/s時),并允許在一條平衡總線上連接最多10個接收器。
(1)三者之間的性能參數:
(2)RS-232的注意事項
RS-232 常用的三根針是 2、3、5。其中5是地線,2和3是用來傳數據的。那么在實際使用中會用到兩種線序的線:2、3直通和2、3交叉。
(3)單工、半雙工、全雙工
如果在通信過程的任意時刻,信息只能由一方A傳到另一方B,則稱為單工。
如果在任意時刻,信息既可由A傳到B,又能由B傳A,但只能由一個方向上的傳輸存在,稱為半雙工傳輸。
如果在任意時刻,線路上存在A到B和B到A的雙向信號傳輸,則稱為全雙工。
—— RS-232的接頭又可分為公頭和母頭 ——
工業機器人真正的應用是用在生產線上(如汽車組裝生產線、半導體硅片搬運等),機器人單機各種搬運動作軌跡等都調試好了,還要配合生產線上的動作要求,也就是還要和PLC連接進行通訊,雙方交互信號,PLC什么時候讓機器人去搬運,機器人搬運完成通知PLC,通過這樣的交互通訊,機器人即可作為整條生產線上的“一員”,和生產線的上的其他機構完成整個生產任務。
工業機器人與PLC的通訊連接
如果工業機器人的編程和PLC的 控制技術同時掌握,那么通過PLC控制機器人就顯得非常簡單了。只要將工業機器人和PLC有效地連接起來并進行相互之間的信號傳輸即可。工業機器人與PLC之間的通訊傳輸有“I/O”連接和通訊線連接兩種。
審核編輯:湯梓紅
-
plc
+關注
關注
5031文章
13711瀏覽量
472097 -
RS-232
+關注
關注
0文章
409瀏覽量
50492 -
工業機器人
+關注
關注
91文章
3444瀏覽量
93730
發布評論請先 登錄
工業機器人與協作機器人概念不同

盤點#機器人開發平臺
ABB機器人與西門子PLC通訊案例
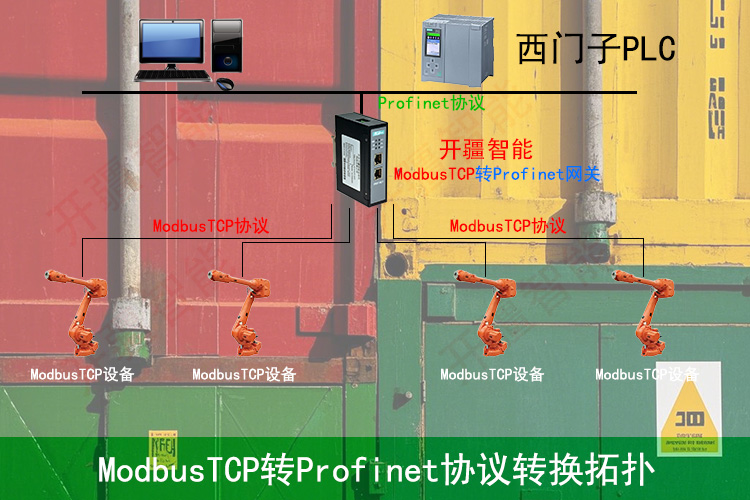
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接






 工商網監
工商網監
評論