") KUKA位置的坐標(biāo)輸入
KUKA位置的坐標(biāo)輸入

$ROBROOT
機(jī)器人位置
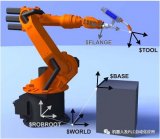
結(jié)構(gòu)類型 FRAME 的變量指明基于 WORLD 坐標(biāo)系的 ROBROOT 坐標(biāo)系位置。
X、Y、Z:原點(diǎn)沿著軸的推移,單位:[mm]
A、B、C:軸角度的旋轉(zhuǎn),單位:[°]
ROBROOT 坐標(biāo)系始終位于機(jī)器人足部。在默認(rèn)配置中,ROBROOT 坐標(biāo)系與 WORLD 坐標(biāo)系是一致的。
地面安裝:默認(rèn)情況下無(wú)推移
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 0.0}
天花板安裝:軸轉(zhuǎn)角 C 轉(zhuǎn)動(dòng) = 180°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 180.0}
墻上安裝:軸轉(zhuǎn)角 B 轉(zhuǎn)動(dòng) = 90°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 90.0,C 0.0}
機(jī)器人位于生產(chǎn)單元內(nèi)的特定位置上 ($ROBROOT<> $WORLD)。將基于 $WORLD
的機(jī)器人位置的坐標(biāo)輸入 $ROBROOT。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29728瀏覽量
212820 -
World
+關(guān)注
關(guān)注
0文章
5瀏覽量
6294
原文標(biāo)題:KUKA 系統(tǒng)變量: $ROBROOT
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何使用ESP12E板來(lái)獲取位置的實(shí)時(shí)坐標(biāo)
求助 如何提取圖像中的鼠標(biāo)位置坐標(biāo)
labview運(yùn)動(dòng)位坐標(biāo)位置控制
使用pads封裝制作pcb時(shí)如何輸入xy坐標(biāo)定位孔位置 ?
KUKA機(jī)器人問(wèn)題解答
點(diǎn)擊鼠標(biāo),獲取XY當(dāng)前位置坐標(biāo)
CAD坐標(biāo)標(biāo)注中如何標(biāo)注普通坐標(biāo)
KUKA機(jī)器人應(yīng)用及系統(tǒng)概述
關(guān)于KUKA 焊接機(jī)器人
KUKA C4機(jī)器人軌跡BASE與TOOL坐標(biāo)
KUKA機(jī)器人之PFO飛行焊控制
KUKA C4機(jī)器人的軌跡BASE與TOOL坐標(biāo)
使用LabVIEW的鼠標(biāo)坐標(biāo)反饋





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論