 KUKA機器人之PFO飛行焊控制
KUKA機器人之PFO飛行焊控制

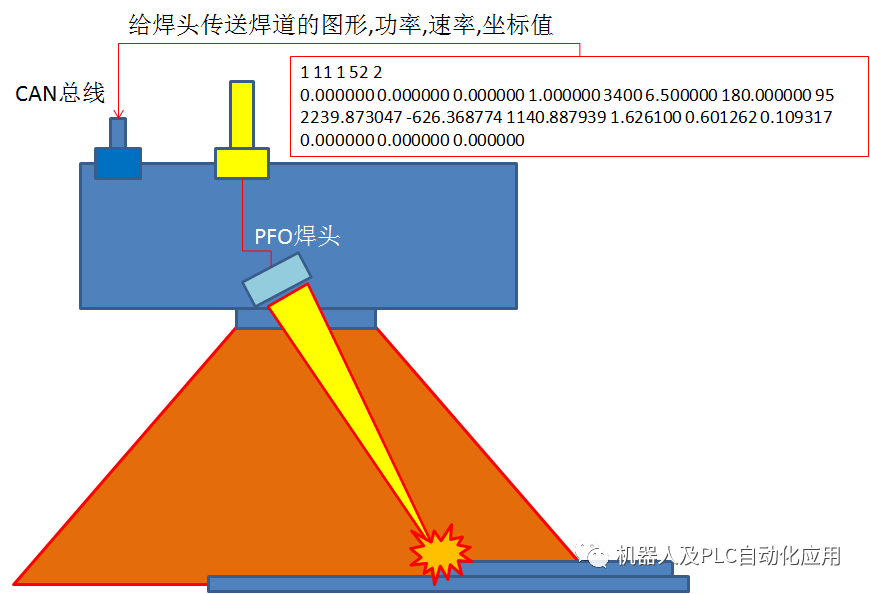
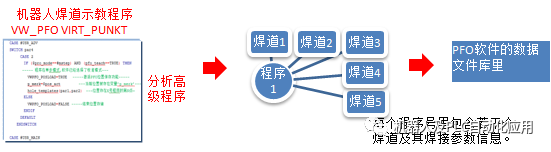
1.機器人在執行焊道位置示教程序時,當機器人運行到焊道軌跡點時,通過KUKA用戶程序記錄焊道的程序號,焊點號,焊道圖形屬性和坐標值,然后存到PFO應用軟件數據庫里。
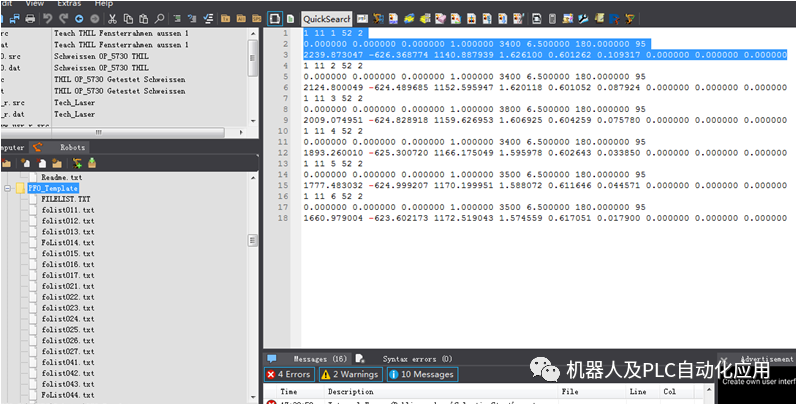


使用軟件用來微調:

還有其他的焊道的模式用來校準
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
212文章
29412瀏覽量
211255 -
KUKA
+關注
關注
3文章
218瀏覽量
16864
原文標題:KUKA機器人之PFO飛行焊控制
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
“兩會”熱議“機器人和飛行汽車”,核心動力電機可能會火
飛行汽車、人形機器人、自動駕駛汽車,在中國經濟邁入高質量發展階段后,這些高科技產品成為推動國內經濟發展的新質生產力,同時也受到“兩會”代表的高度關注,成為2025年“兩會”期間的熱議話題。*附件
發表于 03-31 13:35
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動
汽車點焊機器人系統的電阻焊技術電子應用研究
,電阻焊技術的應用也得到了極大的拓展和優化,不僅提高了焊接質量,還顯著提升了生產效率。本文將探討電阻焊技術在汽車點焊機器人系統中的電子技術應用,包括控制系統的優化、
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
最近在閱讀《具身智能機器人系統》這本書的同時,還讀了 《計算機視覺之PyTorch數字圖像處理》一書,這兩本書完全可以視為是互為依托的姊妹篇。《計算機視覺之PyTorch數字圖像處理》是介紹
發表于 01-01 15:50
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大
發表于 12-29 23:04
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
搜索策略等規劃算法,強調了軌跡規劃需要考慮機器人的運動學約束。在軌跡規劃中,機器人需要同時考慮最大曲率、加速度限制等物理約束,生成平滑可行的運動軌跡。強化學習在規劃控制中的應用也很有創新性,通過智能體
發表于 12-19 22:26
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
如何使用PLC控制機器人
隨著工業自動化技術的飛速發展,機器人技術作為其中的重要組成部分,其應用范圍日益廣泛。在機器人的控制系統中,PLC(Programmable Logic Controller,可編程邏輯控制

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服的實時性.經測試,該平臺能夠對視覺檢測目標的變化做出及時的反應
發表于 05-29 16:17





 工商網監
工商網監
評論