 受蛇蛻皮啟發的軟脫模技術,實現復雜高長徑比微通道制備
受蛇蛻皮啟發的軟脫模技術,實現復雜高長徑比微通道制備
他叫王宏強,目前在南方科技大學擔任副教授。其本碩均畢業于C9高校西安交通大學,隨后到東京大學讀博。接著,又在美國哈佛大學做了三年的博士后研究。2018年秋,在外留學7年之后回國,目前任職于南科大機械與能源工程系。
機器人,是其各個成果的核心詞,同時伴以“柔性”、“微型”、“醫療”、“仿生”等關鍵詞。此前,他曾研發出超薄柔性攀爬機器人、蜜蜂飛行機器等代表成果。
而前不久,他又研發出了一款軟體藤蔓機器人。其中運用到了一項自研技術——軟脫模技術。
其具備加工流程簡單、所需材料易得、無需溶劑參與等優勢,具有較好的普適性。在機器人工程和生物醫學工程領域,比如面向介入醫療的微型軟體醫療機器人、用于人體內外健康檢測的可穿戴式傳感器和天線,以及各種微流道芯片和器官芯片等,有著廣泛的應用前景。
自然界中植物動物種類繁多、多姿多彩,但是它們有著一個非常重要的特點,即身體構造上都含有微細通道。
例如,人體中大大小小的血管,是我們賴以生存必不可少的器官。植物中也類似,需要導管輸運養分。
微型通道一般存在形狀復雜、尺度分布廣等特點,對于眾多生物的生存有著極其重要的意義。
近年來,微通道逐漸成為多個前沿領域的基礎技術。比如,微型軟體機器人需要微型腔道來分布應力應變實現變形;生物研究的前沿——器官芯片和微流道芯片等,更是依賴不同形狀大小的微通道進行流體的操控;而在可穿戴設備和柔性通訊等領域里,微型通道也有著不可或缺的地位。
然而,在現有技術條件下,具有復雜結構的微小通道結構的制作很難。因此,近幾十年來這一直是多領域眾多科學家競相攻關的重點和努力的方向。
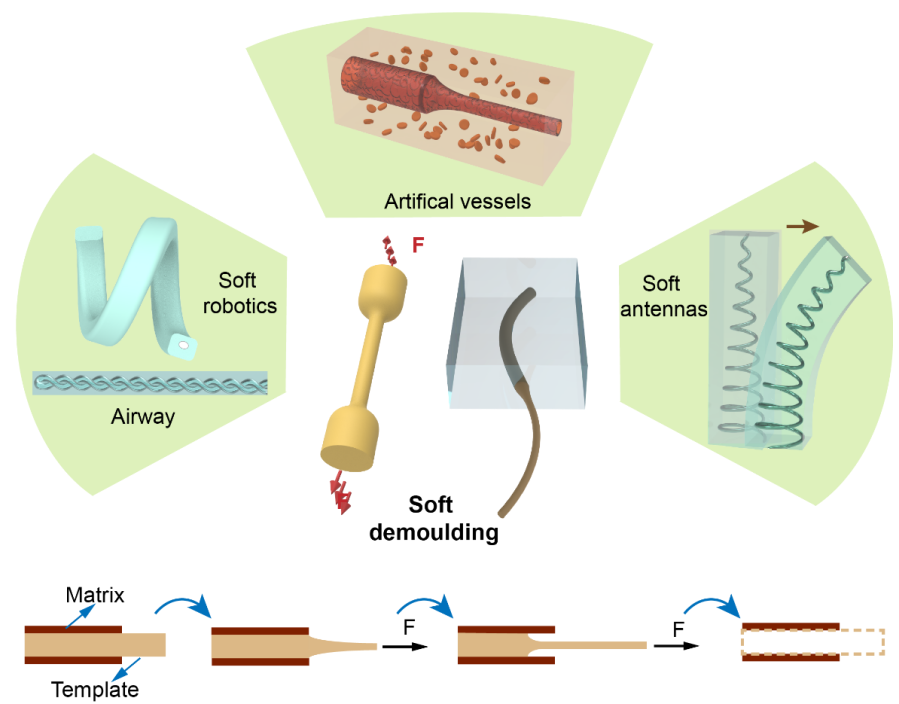
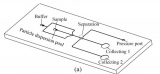
圖 | 軟脫模技術的概念圖(來源:Nature Communications)
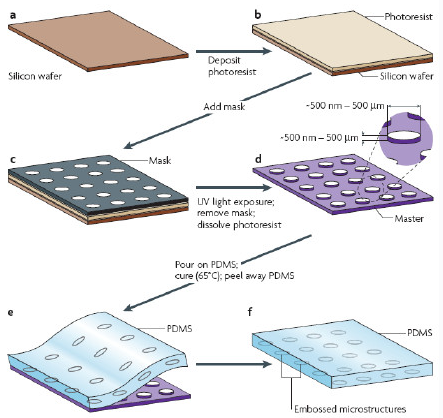
目前,研究者們使用的主要是使用軟光刻技術(soft lithography),通過液態的硅膠材料復刻模具上的微槽結構,再封上一層硅膠層來形成通道結構。
但是,軟光刻的加工需要潔凈間、工藝復雜,而且只適用于制備二維方形通道,很難實現不同截面的、三維復雜結構的微通道。
因此,近年來,領域內新興了不同的微通道加工工藝,主要分成以下三類:溶解模板法、基體溶脹法、和直接 3D 打印法。
但是,這三種方法均不完美。具體來說:
溶解模板法比較耗時,而且只適用于特定材料,比如丙酮只能溶解丙烯腈丁二烯苯乙烯;
基體溶脹法需要化學試劑的參與,比如用丙酮溶脹聚二甲基硅氧烷(PDMS,polydimethylsiloxane),由于會有化學試劑殘留,因此不適合用于生物醫療領域例如器官芯片等;
直接 3D 打印法雖然可以打印復雜通道,但存在可擴展性差、打印精度不高的問題,而粗糙的表面會增大流體作用的阻力,降低軟體驅動器的耐氣壓能力等,也不能滿足現在復雜軟體器件的功能需求。
因此,當下亟需一種新型微通道制備工藝,來實現光滑、復雜,高長徑比的通道結構的的加工。
被世界頂級期刊看好的方向
在高分子纖維受外力下頸縮的現象啟發,該團隊創新性地提出了一種簡單、快速、無需溶劑參與、并且可以制備復雜高長徑比的微型通道的方法——軟脫模技術(soft demoulding)。
區別于傳統的將硬質模板埋入基體材料再抽出的方法,其將可行變的軟質模板引入到了脫模過程中。
在受力情況下,軟質模板的截面會變細,進而讓軟質模板的脫模過程變成一個、對模板形狀長度不再敏感的剝離過程,借此極大降低了模板去除過程中所需的外力,適用于在多種軟質基體材料,可用于制備復雜的、高長徑比的微型通道,并在軟體機器人、可穿戴式傳感器、器官芯片等領域具備應用潛力。
近日,相關論文以《面向復雜高長徑比微通道的自收縮軟脫模研究》(Self-shrinking soft demoulding for complex high-aspect-ratio microchannels)為題發表在Nature Communications上。王宏強團隊的博士研究生范東亮擔任第一作者,王宏強、清華-伯克利深圳學院特別研究員秦培武擔任共同通訊作者。
圖 | 相關論文(來源:Nature Communications)
投稿過程中,一位審稿人表示該制備技術非常具備創新性。另一位審稿人指出,軟脫模技術可以制備出相當復雜的圓形管道,而且其長徑比遠超過傳統的制備工藝,預計這項工作會引起來自不同領域研究微流控的學者的興趣和關注。
事實上在2021年9月,該團隊曾經論文投稿到Nature主刊,但是不久之后該期刊發表了一篇相似的論文,對方也提出了一種制備管狀軟體結構的方法,并將該方法應用于軟體機器人領域,而且也做了一個和本次論文很像的軟體藤蔓機器人。
該團隊表示:“可能主題相近,所以Nature編輯沒有給我們送審,不過編輯肯定了我們方法的創新性,推薦投稿到《自然·通訊》,并且可以直接送審。我們當時覺得挺惋惜的,但同時也覺得慶幸,因為我們選定的研究方向也被世界頂級期刊所看好。”
以蛇蛻皮為研發靈感,為探索優化參數不斷試制超過100多次
據介紹,從研究人員初步產生想法,到論文最終發表歷時三年有余。期間,為了探索優化參數,試制次數超過100多次,回復審稿則歷時半年左右。
關于該項目的最初想法,來源于課題組的需求、以及從自然界中獲得的靈感。柔性驅動是該團隊的主要研究方向,其中柔性電極和氣動驅動都需要微型通道。
但是,要想把通道做小,本身非常困難、受限也非常大,如果再做成具有空間復雜度的形狀和截面則更為困難,這曾讓他們倍感苦惱。
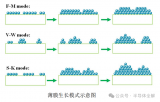
后來,一則蛇蛻皮的視頻帶來了靈感:蛇通過收縮自身的肌肉,在粗糙的地面摩擦,來逐步從舊殼中脫離出來。并且,蛻下的蛇皮竟然還能保持原來的形狀和細微的鱗片形貌特征。
而橡皮筋在外力情況下也會存在收縮截面現象,因此課題組考慮把橡皮筋埋入硅膠材料再將其拔出,借此模仿蛇蛻皮的過程。
確定初步驗證方案可行之后,該團隊對軟脫模技術建立了相應的理論模型,建立過程中,他們將模型和軟脫模以及硬脫模做出了著重性區別。
在硬脫模過程中,模板所受的是剪切力,其所受力的大小會受到長度的影響,長度越大受力越大。
而在軟脫模過程中,軟質模板在受力之下會出現收縮進而變細,這時就能將剪切力轉換成剝離力。期間,不會受到長度的影響,可用于制備高長徑比的微型通道。
而通過測試四種不同材料(尼龍線、銅絲、熱熔膠纖維,聚氨酯纖維),所提出模型的正確性也得到了驗證。
確認理論模型之后,針對軟質模板的材料選擇和制備工藝,課題組展開了進一步的研究。之前選用的是橡皮筋,其和硅膠材料(PDMS)的接觸部分并不是固化的,這會影響通道的結構精度。
而且,從市面上買來的橡皮筋只有固定的直徑可選,這嚴重限制了模板結構的設計。因此,研究人員通過文獻檢索和討論,決定選用設備簡單、且能制備可控直徑的熱拔法(thermal drawing),以此來制備軟質模板結構。
其中,在模板材料選用熱熔膠和熱塑性聚氨酯,它們具備模量低、伸長量高等優勢。通過使用控制拔出速率、加熱溫度、模板后處理、模具組裝等方法,制備出了錐形、螺旋形、雙螺旋形、樹狀、以及馬鞍面形等軟模板結構。
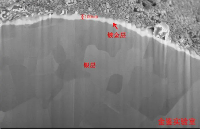
而基于軟脫模技術,上述制備出的模板結構均可通過軟脫模技術,加工出相應的微管道模型。其中,借助這一軟脫模技術該團隊制備出了直徑最小為10 微米和長徑比最高為6000的微管道。
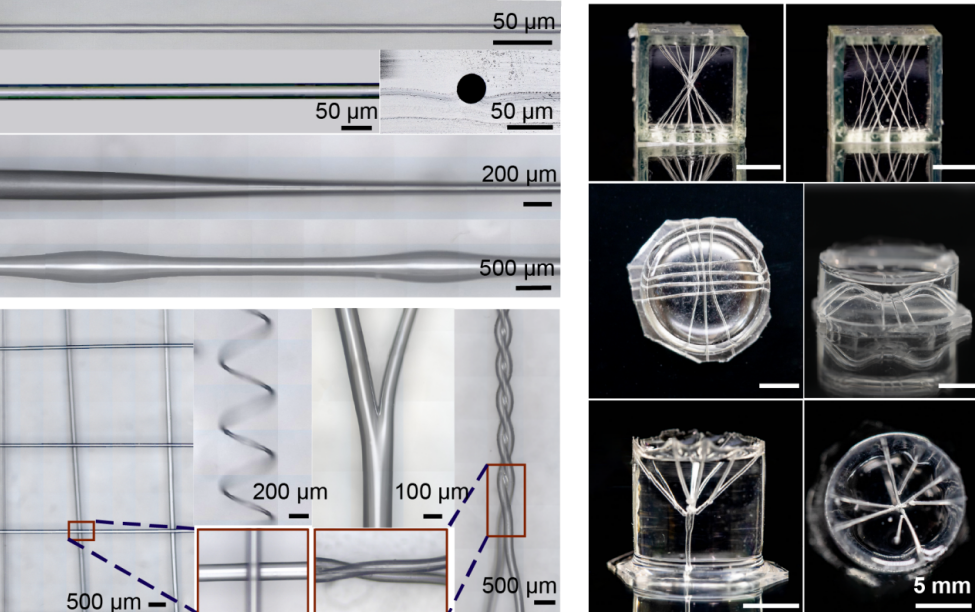
圖 | 軟脫模制備出的各種微管道模型(來源:Nature Communications)
為了證明軟脫模技術的廣泛應用,研究人員先將該技術用于制備微型軟體機器人和可穿戴傳感器。通過該技術,課題組制作了一個具有雙螺旋結構的、直徑100微米的微型通道作為氣壓驅動通道,充氣時可以像蟲子一般的蜷曲。
另外一個直徑150微米、長徑比1600的具有超長螺旋結構的氣腔,在充氣時能模仿藤蔓的卷曲行為,可用于醫療或狹小場景下的檢測等。
而一個具有圓形截面的細長通道,通過注入導電液體能形成可穿戴式傳感器,以用于人體運動檢測。
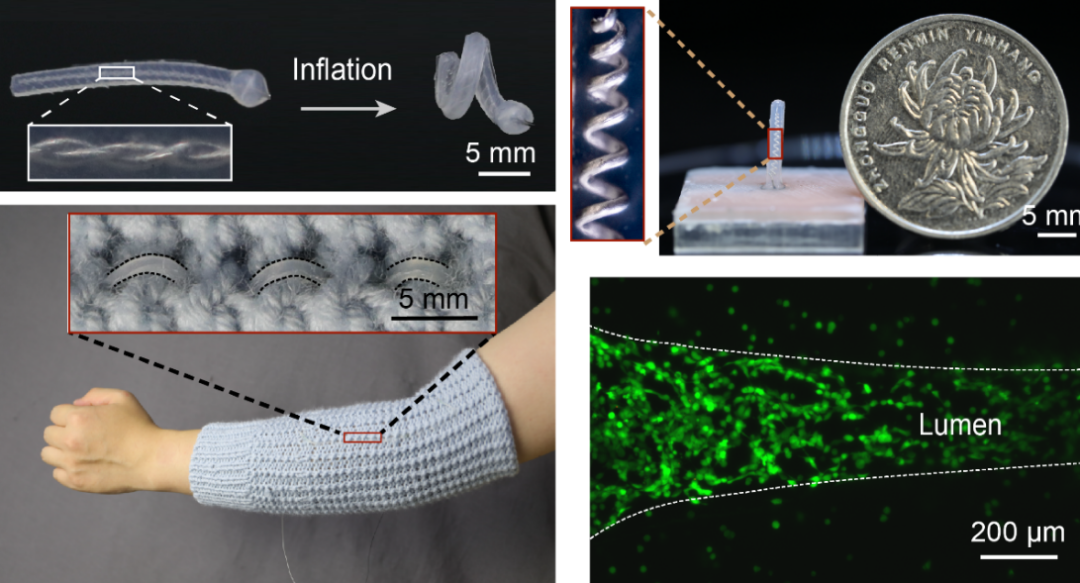
圖 | 軟脫模技術的各種應用:包括仿蟲型微型軟體機器人、軟體微型天線、可穿戴傳感器和錐形血管模型(來源:Nature Communications)
此外,還有一個具有變直徑的三維螺旋結構的通道,通過注入液態合金即可形成微型軟體天線,可用于可穿戴設備的信號傳輸。
為了展現軟脫模技術在生物醫學工程領域的應用,該團隊與秦培武副教授課題組合作,將軟脫模技術應用于血管模型的制備,并驗證了殘余溶劑對血管模型中細胞生長的負面影響,證明該技術具備良好的生物相容性。
未來,研究人員計劃采用新型的模板材料,比如具有自潤滑特性、超高拉伸量的水凝膠、以及新型軟質模板加工工藝,來實現更加復雜、個性化、定制化的通道結構的加工制備。
并且,其還將與不同領域的學者合作,將該技術應用于更加具體的場景,例如用于運動檢測和軟體機器人里面的可穿戴傳感器。
論文鏈接:
https://doi.org/10.1038/s41467-022-32859-z
審核編輯 :李倩
-
傳感器
+關注
關注
2562文章
52524瀏覽量
763590 -
機器人
+關注
關注
213文章
29463瀏覽量
211520
原文標題:受蛇蛻皮啟發的軟脫模技術,實現復雜高長徑比微通道制備
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
詳解原子層沉積薄膜制備技術
飛秒激光技術在微流控芯片中的應用
FIB技術在透射樣品制備中的應用
西安交通大學:受章魚觸角接觸行為啟發的仿生觸覺傳感陣列
微通道反應器特性介紹
微混合器集成技術的市場前景
硅晶圓的制備流程
ATA-1372A寬帶功率放大器在超聲驅動噴嘴微液滴制備中的應用
精密電子焊接挑戰:激光軟釬焊技術的優勢與應用

PDMS軟刻蝕技術的應用
微流控芯片加工中的PDMS軟刻蝕技術和聚合物成型介紹
積鼎 VirtualFlow 案例 環路熱管相變換熱模擬,實現微通道氣液兩相、單相及流固耦合仿真計算





 工商網監
工商網監
評論