") 為什么說智能駕駛將進(jìn)入數(shù)據(jù)驅(qū)動的時(shí)代?
為什么說智能駕駛將進(jìn)入數(shù)據(jù)驅(qū)動的時(shí)代?
“你的頭腦就是你的牢籠,但是如何突破自己的大腦呢?”人們經(jīng)常用這句話來審視自我的局限,但在2022年的智能駕駛行業(yè),這也是所有智能駕駛“大腦”需要回答的一個(gè)問題。
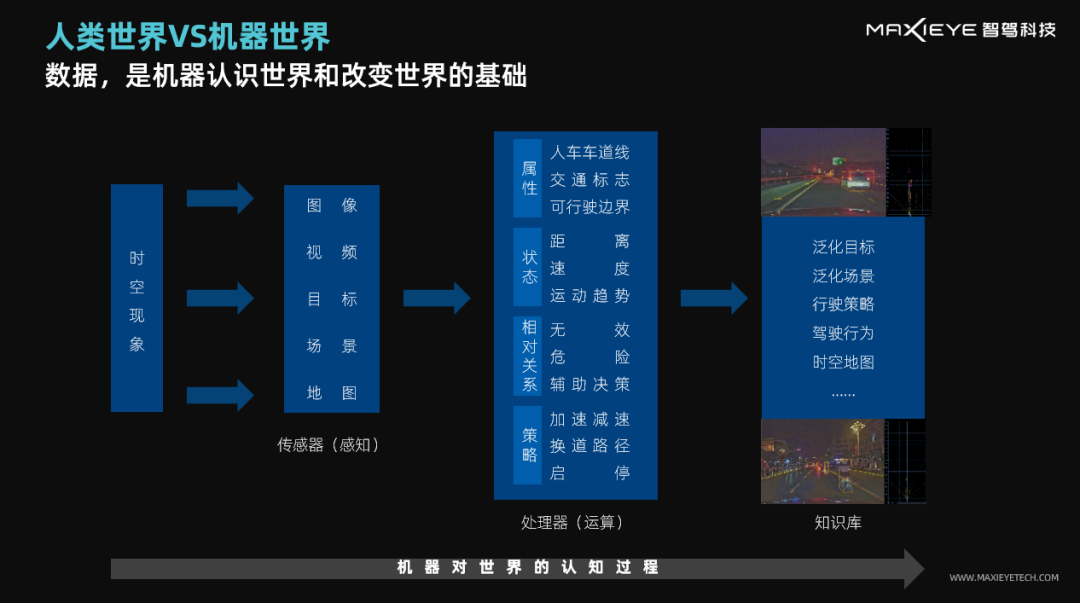
在人類世界中,出生以后,我們首先通過大量的經(jīng)驗(yàn)學(xué)習(xí)、邏輯分析,建立自己的知識體系,成為一個(gè)獨(dú)立的個(gè)體。但在積累到達(dá)一定程度后,往往會開始認(rèn)識并反思自己的局限,并激勵(lì)自己通過拓寬認(rèn)知的邊界和思維上的突破,擁抱更廣闊而美好的世界,達(dá)到全新的高度和境界。這是人類學(xué)習(xí)和進(jìn)步的方式。
在智能駕駛領(lǐng)域中,通過對大量數(shù)據(jù)和豐富出行場景的不斷學(xué)習(xí),變得“越來越聰明”,不斷實(shí)現(xiàn)系統(tǒng)性能的突破,這是機(jī)器智能的方式。
過去幾年,智能駕駛經(jīng)歷了從無到有的過程,從技術(shù)原型的積累到初代產(chǎn)品上車,從L0-L1級的基礎(chǔ)安全性能到L2++級的智慧化體驗(yàn),隨著高階智能駕駛落地需求越來越迫切,數(shù)據(jù)驅(qū)動和場景閉環(huán)的重要性也凸顯出來。
為什么說智能駕駛將進(jìn)入數(shù)據(jù)驅(qū)動的時(shí)代?
數(shù)據(jù)如何在場景中實(shí)現(xiàn)流轉(zhuǎn)?
場景閉環(huán)又如何把當(dāng)下的量產(chǎn)落地和未來高階方案串聯(lián)起來?
近日,智駕科技MAXIEYE創(chuàng)始人周圣硯在2022 年度(第四屆)高工智能汽車市場峰會發(fā)表主題演講,圍繞《自動駕駛升維:量產(chǎn),數(shù)據(jù),場景閉環(huán)》進(jìn)行了觀點(diǎn)闡述,通過剖析智能駕駛面臨的難題,與行業(yè)同仁探討數(shù)據(jù)驅(qū)動的“解題”方案。

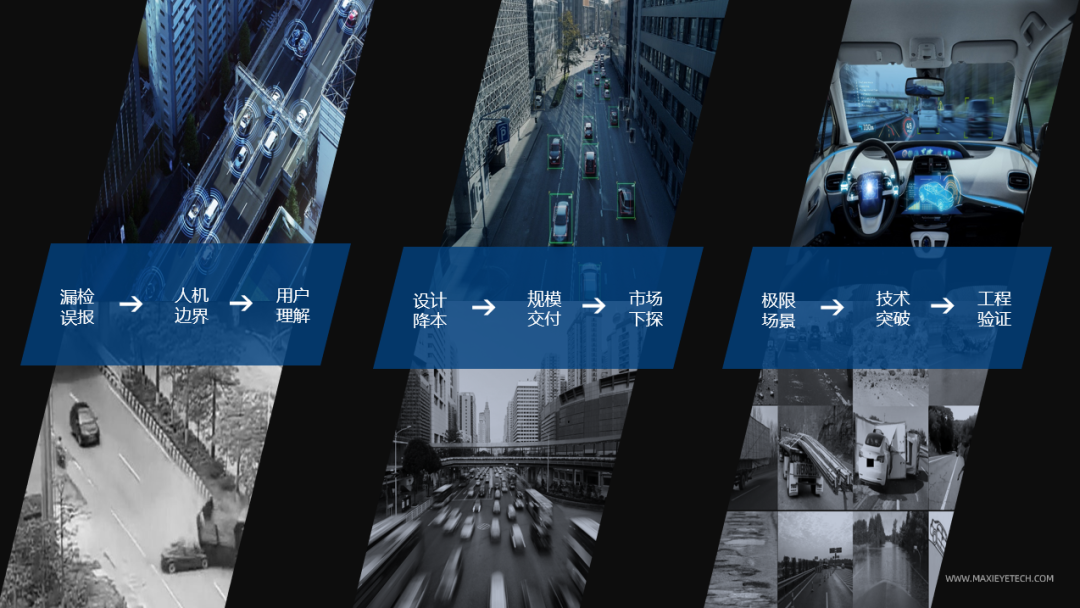
第一,實(shí)現(xiàn)可靠穩(wěn)定的系統(tǒng)性能難。智能駕駛誕生的初衷,是讓出行更加安全、舒適、便捷。但最近因智能駕駛導(dǎo)致的交通事故,一定程度引發(fā)了大家的質(zhì)疑和擔(dān)憂。智能駕駛系統(tǒng)的安全可靠,人機(jī)交互的邊界規(guī)則等成為不可回避的問題。
“這是智能駕駛理想和現(xiàn)實(shí)的差距。”周圣硯表示,在用戶理想的認(rèn)知中,智能駕駛是沒有約束、無限制的,但現(xiàn)階段可規(guī)模化應(yīng)用的輔助駕駛,本質(zhì)上還是人機(jī)共駕,需要用戶對智能駕駛的“漸進(jìn)式”成長有充分的理解。
作為技術(shù)服務(wù)提供商要做到的是,無論行業(yè)處于哪個(gè)階段,都需要確保在相應(yīng)的功能及使用場景的范疇內(nèi),提供安全可靠的產(chǎn)品。場景邊界之外是人開,場景邊界之內(nèi)是機(jī)器去開。場景邊界之外需要鉤子算法去獲取下一代產(chǎn)品升級所需要的數(shù)據(jù)和場景。但過去行業(yè)浪費(fèi)了大量數(shù)據(jù)場景,屬于智能駕駛的場景庫積累才剛剛起步。
第二,極致性價(jià)比和規(guī)模化量產(chǎn)難。一晃眼智能駕駛產(chǎn)業(yè)已經(jīng)發(fā)展了多年,但在實(shí)際上車中,真正的規(guī)模化才剛剛開始。在中國乘用車所有價(jià)位車型銷量中,15萬元以下車型銷量占比遠(yuǎn)超50%,但這超過50%的價(jià)位車型L2級智能駕駛滲透率,比市場平均水平低了10個(gè)百分點(diǎn),反應(yīng)了當(dāng)前智能駕駛尚未很好地滲透大眾消費(fèi)市場。
立足大眾消費(fèi)市場,背后的規(guī)模化量產(chǎn)面臨一個(gè)現(xiàn)實(shí)問題:性能和價(jià)格的平衡。“用很高的成本做一套系統(tǒng),消費(fèi)者很難接受,對基于規(guī)模化量產(chǎn)實(shí)現(xiàn)大量數(shù)據(jù)積累,意義并不大。”但如果沒有規(guī)模化和場景,上述的第一個(gè)難題同樣難以解決。
第三,高階智能駕駛落地難。在自動駕駛分級中,到今天能夠真正在開放場景中落地的智能駕駛,依然在L3級以下。基于漸進(jìn)式升維路線從下往上走,依賴基于規(guī)模化L2的場景和數(shù)據(jù)基礎(chǔ),才能實(shí)現(xiàn)高階應(yīng)用的突破。
三大難題共同指向數(shù)據(jù)和場景:在量產(chǎn)系統(tǒng)邊界明確的前提下,建立用戶認(rèn)知,通過數(shù)據(jù)驅(qū)動下一代產(chǎn)品升級;基于有效場景和數(shù)據(jù)的挖掘?qū)崿F(xiàn)極致的系統(tǒng)性能,以高性價(jià)比實(shí)現(xiàn)人人可享的規(guī)模化,再由人人提供的數(shù)據(jù)驅(qū)動迭代;在良好的用戶認(rèn)知和動態(tài)迭代中,實(shí)現(xiàn)高階智能駕駛升維。

可靠系統(tǒng)和高階方案的實(shí)現(xiàn),對數(shù)據(jù)積累和場景閉環(huán)提出了“加法的”需求——盡可能多地上車。
在規(guī)模化量產(chǎn)中打通數(shù)據(jù)閉環(huán)后,更重要的是建立獲取邊界數(shù)據(jù)的有效觸發(fā)機(jī)制。“盲目收集大量常規(guī)的場景,對系統(tǒng)意義并不大。我們希望在不增加硬件成本的前提下,獲取更多邊界數(shù)據(jù),邊界數(shù)據(jù)意味著下一代系統(tǒng)邊界性能的突破。”
目前MAXIEYE已經(jīng)在1R1V高性價(jià)比算力平臺的MAXIPILOT1.0量產(chǎn)方案中,部署了數(shù)據(jù)閉環(huán)和33種觸發(fā)機(jī)制(觸發(fā)機(jī)制還在持續(xù)增加中),包含功能觸發(fā)、駕駛員行為觸發(fā)、系統(tǒng)觸發(fā)、感知觸發(fā)等類型,實(shí)現(xiàn)邊界數(shù)據(jù)場景的高效利用。
比如AEB功能觸發(fā)前后幾秒,MAXIPILOT會將場景視頻、車身信息、系統(tǒng)參數(shù)信息等關(guān)聯(lián)信息閉環(huán)回傳,進(jìn)行復(fù)盤和分析;而感知觸發(fā)的目的,是將同一目標(biāo)的不同傳感器檢測數(shù)據(jù)做全面的精度對標(biāo),大幅提高感知精度,為高階系統(tǒng)落地進(jìn)行技術(shù)積累。
目前MAXIEYE通過量產(chǎn)系統(tǒng)已經(jīng)積累超過1億公里真實(shí)場景數(shù)據(jù)。“數(shù)據(jù)回傳之前在車端完成脫敏,通過算法部署把人臉、車牌等信息在車端清洗掉。”
MAXIPILOT量產(chǎn)系統(tǒng)AEB觸發(fā)視頻
“看到這些AEB觸發(fā)場景,同事們感觸很深,自己做出的產(chǎn)品實(shí)實(shí)在在避免了潛在交通事故的發(fā)生,摩托車橫穿的那個(gè)緊急制動,甚至救了一家三口。”
在數(shù)據(jù)回傳中,MAXIEYE開發(fā)了配套工具鏈。通過工具可以看到實(shí)時(shí)感知結(jié)果、實(shí)時(shí)融合結(jié)果、實(shí)時(shí)路徑規(guī)劃顯示,以及給油門剎車發(fā)出的控制信號。有價(jià)值的場景數(shù)據(jù)會到后端進(jìn)行網(wǎng)絡(luò)校驗(yàn),將更準(zhǔn)確的結(jié)果不斷更新到量產(chǎn)車中,在場景閉環(huán)中實(shí)現(xiàn)數(shù)據(jù)驅(qū)動的智能駕駛。

“能不能用低階系統(tǒng)為高階系統(tǒng)賦能?”這是車廠合作伙伴提出的命題,也是MAXIEYE升維的思路所在,即用低階的“成本減法”和眾包方式重建關(guān)鍵場景地圖的“場景減法”,為高階智能駕駛鋪路。
高階領(lǐng)航輔助駕駛量產(chǎn)中,城市地面和路口等場景一直是難以突破的瓶頸所在。通過基于用戶車輛的眾包數(shù)據(jù),解決路口等關(guān)鍵場景的信息重建,可支持高階系統(tǒng)典型場景的敏銳迭代。
眾包數(shù)據(jù)實(shí)現(xiàn)路口等關(guān)鍵場景的信息重建
伴隨MAXIEYE全系產(chǎn)品部署數(shù)據(jù)閉環(huán)和相關(guān)協(xié)議棧、技術(shù)棧。換句話說,就是在不同的傳感器系統(tǒng)方案中,除了數(shù)據(jù)流量不同,都可以用通用的工具鏈賦能車廠客戶搭建完整的數(shù)據(jù)機(jī)制。
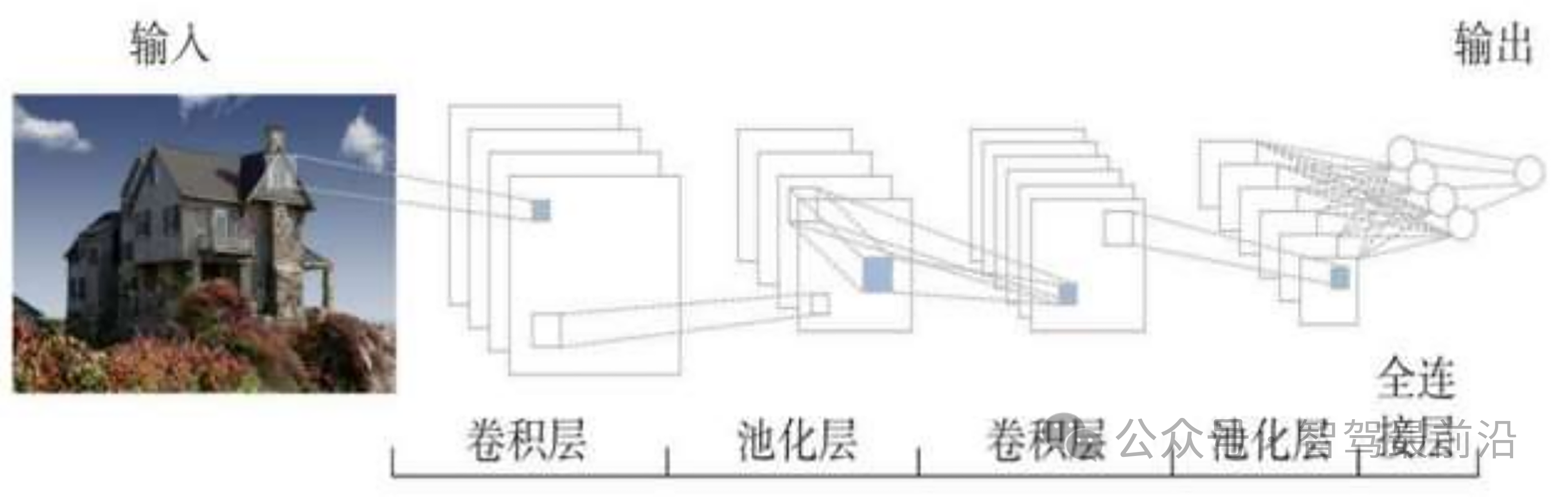
此外,MAXIEYE正加速部署BEV技術(shù)架構(gòu),這種端到端的智能駕駛系統(tǒng)開發(fā),將大幅減少感知目標(biāo)特征的信息損失,減少對經(jīng)驗(yàn)邏輯依賴的同時(shí),真正實(shí)現(xiàn)數(shù)據(jù)驅(qū)動的自學(xué)習(xí),釋放數(shù)據(jù)和場景閉環(huán)的更大價(jià)值。
審核編輯:劉清
-
數(shù)據(jù)驅(qū)動
+關(guān)注
關(guān)注
0文章
139瀏覽量
12545 -
智能駕駛
+關(guān)注
關(guān)注
4文章
2778瀏覽量
49702 -
AEB
+關(guān)注
關(guān)注
1文章
54瀏覽量
20117 -
智慧出行
+關(guān)注
關(guān)注
0文章
113瀏覽量
7837
原文標(biāo)題:一文讀懂?dāng)?shù)據(jù)驅(qū)動和場景閉環(huán),為什么做,怎么做?
文章出處:【微信號:maxieye2015,微信公眾號:智駕科技MAXIEYE】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
適用于數(shù)據(jù)中心和AI時(shí)代的800G網(wǎng)絡(luò)
鐵路安全巡檢進(jìn)入智能時(shí)代:頂堅(jiān)防爆巡檢手持對講終端的應(yīng)用與成效

智能駕駛時(shí)代通過駕駛?cè)藬?shù)據(jù)模型降低交通事故保障生命安全
智能駕駛數(shù)據(jù)采集回注測評工具 - ARS
標(biāo)貝數(shù)據(jù)標(biāo)注在智能駕駛訓(xùn)練中的落地案例

AI數(shù)據(jù)服務(wù)在智能駕駛訓(xùn)練中的應(yīng)用實(shí)例
智能座艙與智能駕駛技術(shù)演進(jìn)分析

從特斯拉看智能駕駛未來發(fā)展
智能駕駛與自動駕駛的關(guān)系
智能駕駛的挑戰(zhàn)與機(jī)遇
智能駕駛和自動駕駛區(qū)別是什么
智能駕駛時(shí)代下的EMC挑戰(zhàn)與防護(hù)策略





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論