 一種紅樹林亞種分類的無人機高光譜遙感方法
一種紅樹林亞種分類的無人機高光譜遙感方法

紅樹林是生長在熱帶和亞熱帶地區,陸地和海洋交界的海岸潮間帶灘涂上生長的由木本植物組成的喬木和灌木林群落。紅樹林作為一種獨特的實地植被類型,為鳥類、魚類以及海洋生物提供了豐富的食物和良好的棲息環境,在抵御海洋自然災害,維護海灣、河口生態環境,保護沿海實地多樣性方面具有不可替代的重要作用。
傳統的實地調查方法獲取紅樹林物種信費時費力,且調查工作往往難以深入根系繁茂的紅樹林內部。相比而言,遙感技術更加經濟高效,能夠實現多時相且空間連續監測植被物種的構成。目前,已有大量研究利用遙感技術對紅樹林物種進行識別或分類,中等空間分辨率的多光譜遙感衛星影像。
1 研究方法
1.1數據獲取
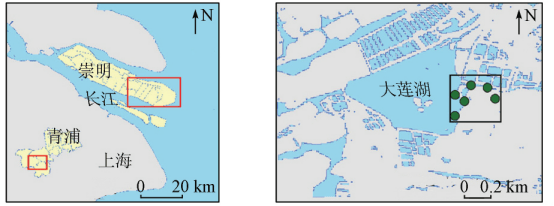
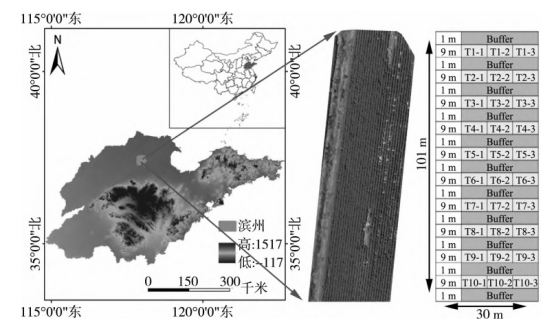
用無人機搭載納米高光譜成像儀獲取的南沙濕地公園高空間分辨率、高光譜分辨率影像,用作濕地公園局部區域的紅樹林亞種分類的源數據。
在南沙濕地公園內,開展實地調查,詳細記錄紅樹林基本分布情況,作為紅樹林分類結果的對照。使用手持地物光譜儀獲取的南沙濕地公園實地采樣點位數據和光譜數據作為采樣點光譜數據庫。根據實際調查情況,選擇一處紅樹林物種相對較多,環境影響較為復雜的典型區域,對該區域開展基于無人機高光譜影像的紅樹林樹種分類工作。
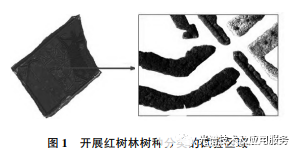
航高200m,地面分辨率0.1m,光譜分辨率2.23nm,覆蓋光譜范圍400~1000nm,包含有269個波段。實驗中使用的數據格式為像素按行存儲(bandinterleavedbyline,BIL)。截取其大小為2000×2000像素的影像作為試驗區(圖1)。南沙濕地公園共二期工程,選取一期進行航飛,面積大約2km2。影像主體部分位于一期中心,地物種類主要是蘆葦、木欖、秋茄、水黃皮、鐵冬青和水面。
1.2 波譜庫的建立和編輯
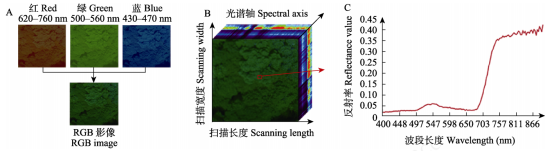
在實地調查中,在光照充足的情況下,采用手持光譜儀采集樹種的光譜曲線信息,考慮到其他植物、水體、土壤等周圍環境對光譜曲線的影響,同時采集周圍環境的光譜信息,為端元光譜提供參考。
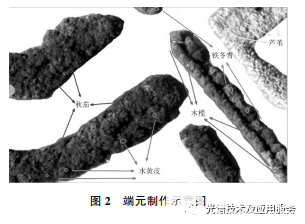
根據實地調查數據對該區域每一個樹種采集樣本,并將采集到的樹種樣本對應到無人機影像中的對應區域,作為各樹種的參考樣本,并以參考樣本的光譜作為參考在全幅影像上均勻地選取一定數量的端元,得到各樹種的候選端元集合,如圖2所示。
1.3 數據預處理
由于水域不是本文關注重點,采用掩膜法手工去除塊圖中的水域部分。
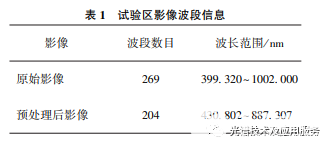
由于無人機拍攝時環境條件存在差異、拍攝時機身的擺動造成不同條帶光譜存在差異、條帶拼接時存在偏移等問題,對高光譜影像進行預處理,包括亮度轉換,反射率校正,幾何校正,再使用遙感圖像處理系統的專業鑲嵌模塊對校正結果進行拼接,根據先驗知識和影像各波段質量情況,去除部分波段后得到試驗區的完整塊圖。塊圖包含的波段信息如表1所示。
1.4 樹種分類技術方法
本實驗用到了以下技術方法:
支持向量機是一種基于統計學習理論的機器學習算法。它通過解算最優化問題,在高維特征空間中尋找最優分類超平面,從而解決復雜數據的分類及回歸問題。支持向量機屬于一般化線性分類器,這種分類器的特點是他們能夠同時最小化經驗誤差與最大化幾何邊緣區,因此支持向量機也被稱為最大邊緣區分類器。
光譜解混。受高光譜成像儀空間分辨率限制,以及紅樹林區域樹種混雜原因,一個像元內往往包含多個樹種,高光譜遙感圖像存在大量混合像元,對高光譜圖像的混合像元分解得到端元及豐度的過程,一般稱為像元的光譜解混。其中,端元代表圖像中存在的純物質,豐度代表某個像素中的每個端元所點的百分比。
多端元線性混合光譜分解。混合像元是高光譜圖像目標分類準確率降低的主要原因之一,因此不能直接進行基于像元的監督分類。本文使用多端元線性混合光譜分解的方法,即光譜解混時對塊圖的每個像素進行像素級分類,從而得到反映每個像素內具有的樹種及其對應的比例的豐度圖。該豐度圖得到了單個像素內所具有的樹種及其對應的比例,在亞像元級別反映各樹種的分布,更符合真實的樹種分布。在此基礎上,考慮每個像素的最大豐度樹種和相鄰像素的情況,處理形成最終合理的分類結果。
混淆矩陣算法。混淆矩陣算法是現在國際上比較通用的遙感影像分類精度評價方法,在圖像精度評價中,通過將每個實測像元的類別與分類成果圖像中的同一位置的像元類別相比較計算得到。
2實驗與結果
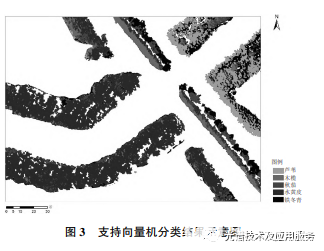
對于支持向量機分類部分,本文將端元光譜庫的樣本直接采用為監督分類的樣本,具體包括蘆葦、木欖、秋茄、水黃皮、鐵冬青。再根據傳統的支持向量機分類模型對預處理后的塊圖執行監督分類,使用傳統的分類方法直接對每個像元賦予了樹種類別,得到支持向量機分類結果。分類結果如圖3所示。
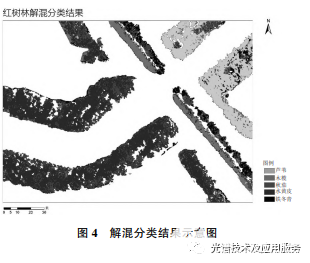
由于傳統的分類方法直接對每個像元賦予特定的類別,但在紅樹林區域是不合理的。在前面的數據基礎上,通過多端元線性混合光譜分解得到各樹種類別的豐度圖,再進一步處理形成分類結果,如圖4所示。
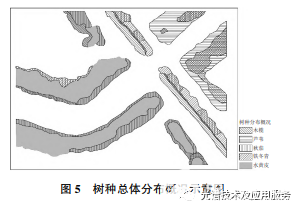
在進行精度評價前,本文根據實地調查情況,制作了樹種總體分布概況示意圖(圖5),作為分類結果的對照。由于試驗區紅樹林空間分布復雜,局部區域不存在只有單一植被的情況,且混雜程度不一,分布圖僅描繪了不同區域的優勢樹種,不排除存在其他植被的可能性。因此,不能直接使用分布圖進行精度評定。
考慮到分布圖的局限性,實驗在充分參考樹種分布概況的前提下,根據紋理、色彩、大小、陰影等特征、直接在影像上采集樣本,作為像元類別實測數據,再分別統計支持向量機分類結果和解混分類結果,形成混淆矩陣,如表3、表4所示。
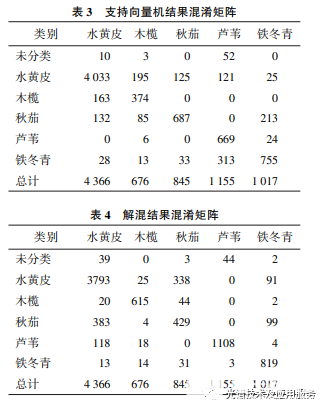
根據支持向量機分類結果和解混分類結的混淆矩陣,計算兩種分類方法的總體分類精度,結果如表5所示。

3實驗分析
將分類結果與實地調查數據對比,除去個別區域植被繁雜、周圍環境干擾使產生的混合像元難以解混,以及“同物異譜”或“同譜異物”的現象存在,造成部分樹種分類與實際有出入之外,兩種分類結果總體上與實地調查中紅樹林樹種分布的情況基本一致。其中,支持向量機分類總體精度達到80.88%,光譜解混后分類精度進一步達到83.93%。可以看到,在基于無人機高光譜影像的樹種識別中,解混和支持向量機方法都能較好地識別出紅樹林的樹種,總體精度都達到了80%以上。相比于支持向量機分類方法,在近水形成的紅樹林混交區域,解混方法在紅樹林混交區域總體上表現更好,能夠在一定程度上提高紅樹林的分類精度。
在本實驗中,存在不少未能識別成功的區域,經分析影像質量發現,這些區域除了少數是其他植被之外,大部分為陰影、水體附近等影像特征信息較少的區域。光譜解混方法明顯提升了木欖、蘆葦、鐵冬青的分類精度,但在水黃皮、秋茄分類中不占優勢,究其原因:①秋茄和水黃皮之間的波形及反射率值十分相近,在分類時容易錯分;②秋茄本身植株矮小,光譜特征受其他植株影響較大,干擾光譜解混的豐度計算,影響最終分類。
4結束語
本次實驗進行了大量的紅樹林高光譜數據獲取和處理工作,積累了一些寶貴的經驗。
1.紅樹林生長區域樹種空間混雜,混合像元眾多,為保證分類準確性,樹種的光譜信息宜優先實地采樣獲取。
2.對紅樹林樹種分類時不能直接根據像元劃分樹種,必須對像元進行光譜解混,才能得到更接近于真實的分類結果。
3.高質量的影像數據是實現準確分類不可忽視的重要前提條件。
4.高光譜影像具有超高的光譜分辨率,能夠反映出不同樹種間的光譜差異,為不同樹種分類提供可能,但仍有部分樹種間的光譜差異十分細微,它們的波形及反射率值都很相近,像元解混存在困難,容易造成錯分,需要進一步研究更有效的分類方法。
總的來說,像元解混是一項行之有效的技術方法,能夠明顯提高目標分類精度,基于高光譜影像進行樹種監督分類的技術手段較為成熟,有著非常廣闊的應用前景。
萊森光學(深圳)有限公司是一家提供光機電一體化集成解決方案的高科技公司,我們專注于光譜傳感和光電應用系統的研發、生產和銷售。
審核編輯 黃昊宇
-
遙感
+關注
關注
0文章
252瀏覽量
17178 -
無人機
+關注
關注
231文章
10841瀏覽量
186750 -
高光譜
+關注
關注
0文章
421瀏覽量
10324
發布評論請先 登錄

農民伯伯的新神器?高光譜無人機讓種地更像做科研

礦產勘查不用“盲人摸象”了,高光譜無人機助你看透地表!

提高基礎設施檢查效率:無人機高光譜成像儀的新方法

MOS 管在無人機電池中的關鍵應用

環境遙感行業發展趨勢分析 遙感數據集的獲取與使用
基于無人機高光譜遙感的河湖水環境探測
基于無人機多光譜遙感的棉花生長參數和產量估算
基于無人機高光譜謠感的蘊地退化指示物種的識別
基于無人機高光譜的荒漠草原地表微斑塊分類研究






 工商網監
工商網監
評論