") Python實(shí)現(xiàn)所有算法之牛頓前向插值介紹
Python實(shí)現(xiàn)所有算法之牛頓前向插值介紹

今天的算法是插值,細(xì)分是牛頓插值。關(guān)于插值可能大家聽到最多的就是圖像插值,比如100元的攝像頭有4K的分辨率???其實(shí)這里就是使用的插值算法,通過(guò)已經(jīng)有的數(shù)據(jù)再生成一些,相當(dāng)于提升了數(shù)據(jù)的量。如果我們想放大圖像,我們需要使用過(guò)采樣算法來(lái)擴(kuò)展矩陣。
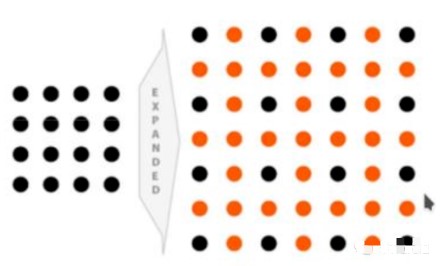
左邊是原有的信息,右邊是通過(guò)算法生成的新數(shù)據(jù)
就像這樣
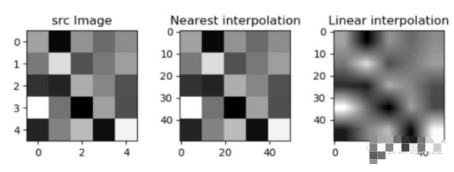
在上圖中,出現(xiàn)的算法是最近鄰算法,也稱為近端插值,是一維或多維空中多元插值的一種簡(jiǎn)單方法。插值是通過(guò)已知的離散數(shù)據(jù)點(diǎn)在一定范圍內(nèi)尋找新數(shù)據(jù)點(diǎn)的過(guò)程或方法。最近鄰插值算法選擇最接近數(shù)據(jù)點(diǎn)的值,完全不考慮其他相鄰點(diǎn)的值,從而生成一個(gè)分段常數(shù)插值值作為數(shù)據(jù)點(diǎn)的值。線性的插值算法是雙線插值是二維坐標(biāo)系下線性插值的擴(kuò)展,用于插值二元函數(shù)。它的核心思想是在兩個(gè)方向上執(zhí)行一次線性插值。
關(guān)于這里的圖像算法我不想說(shuō)什么,等之后我會(huì)補(bǔ)上。簡(jiǎn)單來(lái)說(shuō)在數(shù)據(jù)給的少的情況下我們都可以考慮使用插值算法來(lái)生成新數(shù)據(jù)或者是改善。
注意我們處理的是離散數(shù)據(jù):離散數(shù)據(jù)是指其數(shù)值只能用自然數(shù)或整數(shù)單位計(jì)算的數(shù)據(jù)。
離散函數(shù):定義域是離散集合的函數(shù)稱為離散函數(shù)。其函數(shù)圖像為一系列離散的點(diǎn)。
在離散數(shù)據(jù)的基礎(chǔ)上補(bǔ)插連續(xù)函數(shù),使得這條連續(xù)曲線通過(guò)全部給定的離散數(shù)據(jù)點(diǎn)。插值是離散函數(shù)逼近的重要方法,利用它可通過(guò)函數(shù)在有限個(gè)點(diǎn)處的取值狀況,估算出函數(shù)在其他點(diǎn)處的近似值。
理論就這么多了(其實(shí)也沒(méi)有理論就是說(shuō)下基本的概念)
牛逼的插值算法來(lái)自:

《自然哲學(xué)的數(shù)學(xué)原理》的第三卷的引理五
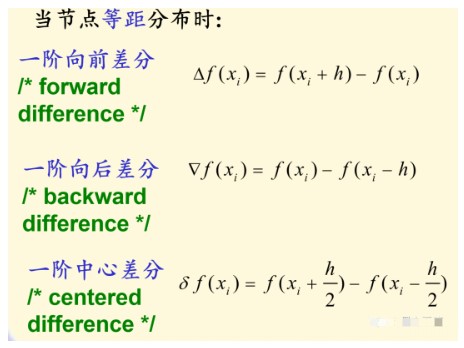
對(duì)牛頓插值來(lái)說(shuō),它最大的特點(diǎn)是引入了差商這個(gè)概念。差商即均差,一階差商是一階導(dǎo)數(shù)的近似值。對(duì)等步長(zhǎng)(h)的離散函數(shù)f(x),其n階差商就是它的n階差分與其步長(zhǎng)的n次冪的比值。例如n=1時(shí),若差分取向前的或向后的,所得一階差商就是函數(shù)的導(dǎo)數(shù)的一階近似;若差分取中心的,則所得一階差商是導(dǎo)數(shù)的二階近似。

對(duì)一個(gè)f(x)可以構(gòu)造差商表來(lái)遞推的給出差商
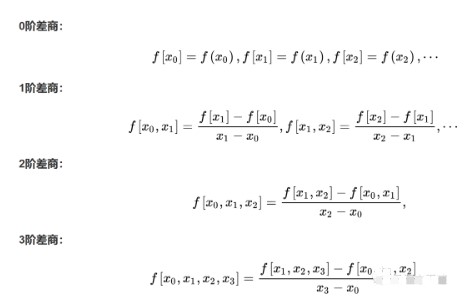
計(jì)算的公式就是這樣,因?yàn)槭侵貜?fù)同一種范式,所以程序?qū)崿F(xiàn)可以使用遞歸
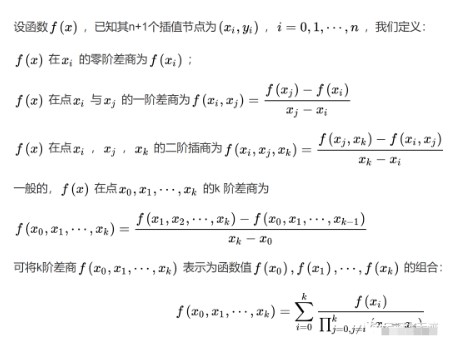
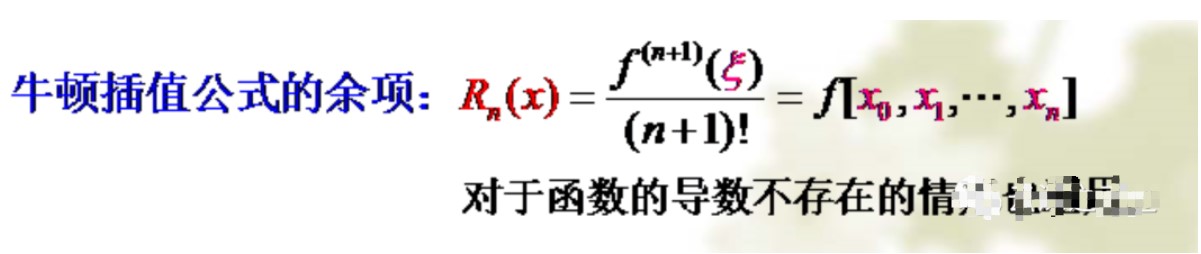
事實(shí)上我們應(yīng)該給出一點(diǎn)更加規(guī)范的論證(不就是個(gè)導(dǎo)數(shù))
有了上面的定義,作用是給出每一項(xiàng)的系數(shù)。具體推導(dǎo)是這樣的:

最后的就是我們的插值公式
為了看起來(lái)平易近人,可以寫成這樣

還有一種是等間距的插值計(jì)算,在下面的計(jì)算中間距設(shè)置為h(方向?yàn)榍跋虿罘郑?/p>
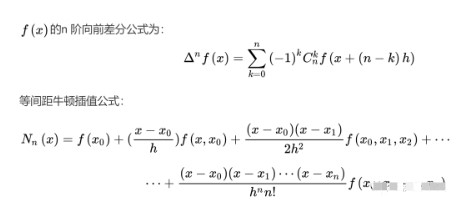
這個(gè)圖就完美了!!!
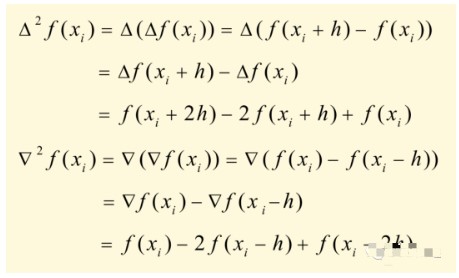
二階的前向差分后和后向差分都在這里了
牛頓插值作為一種常用的數(shù)值擬合方法,因其計(jì)算簡(jiǎn)單,方便進(jìn)行大量插值點(diǎn)的計(jì)算。在實(shí)驗(yàn)中經(jīng)常出現(xiàn)只能測(cè)量得到離散數(shù)據(jù)點(diǎn)的情況,或者只能用數(shù)值解表示某對(duì)應(yīng)關(guān)系之時(shí),可以使用牛頓插值公式,對(duì)離散點(diǎn)進(jìn)行擬合,得到較為準(zhǔn)確的函數(shù)解析值。
牛頓真厲害啊,幾百年前他萬(wàn)萬(wàn)沒(méi)有想到,一個(gè)小輩大晚上的還得研究人家隨手寫的東西。
牛頓插值算法的優(yōu)點(diǎn)是,每一個(gè)新項(xiàng)的生成都不需要龐大的算力,對(duì)前一項(xiàng)進(jìn)行計(jì)算就行,拉格朗日的算法是每一個(gè)新項(xiàng)都需要對(duì)基函數(shù)完全計(jì)算,耗費(fèi)算力。最后我們的泰勒公式其實(shí)就是對(duì)牛頓的插值算法進(jìn)行了改進(jìn):

就記幾項(xiàng)就行
對(duì)了,插值是針對(duì)自變量的任何中間值估計(jì)函數(shù)值的技術(shù),而計(jì)算給定范圍之外的函數(shù)值的過(guò)程稱為外插。
u是啥?別著急

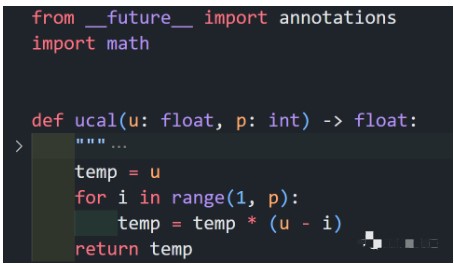
這個(gè)公式對(duì)于在給定值集的開頭附近插值 f(x) 的值特別有用。h 稱為差值區(qū)間,u = ( x – a ) / h,這里 a 是第一項(xiàng)。
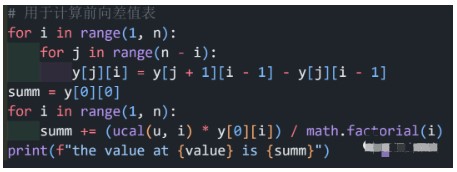
函數(shù)就是算這個(gè)的。
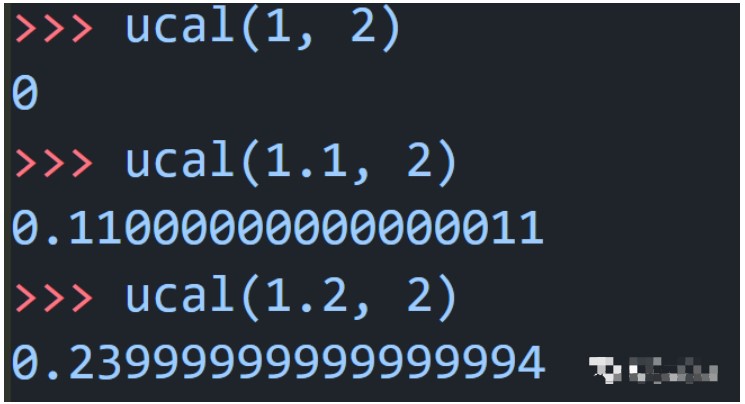
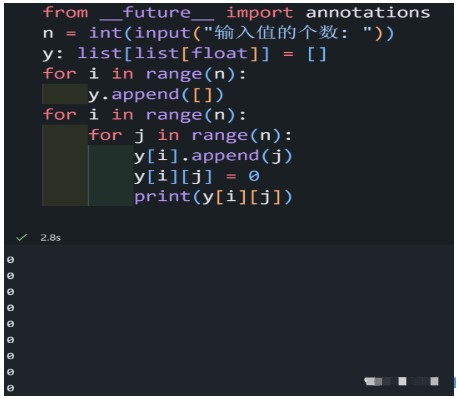
測(cè)試
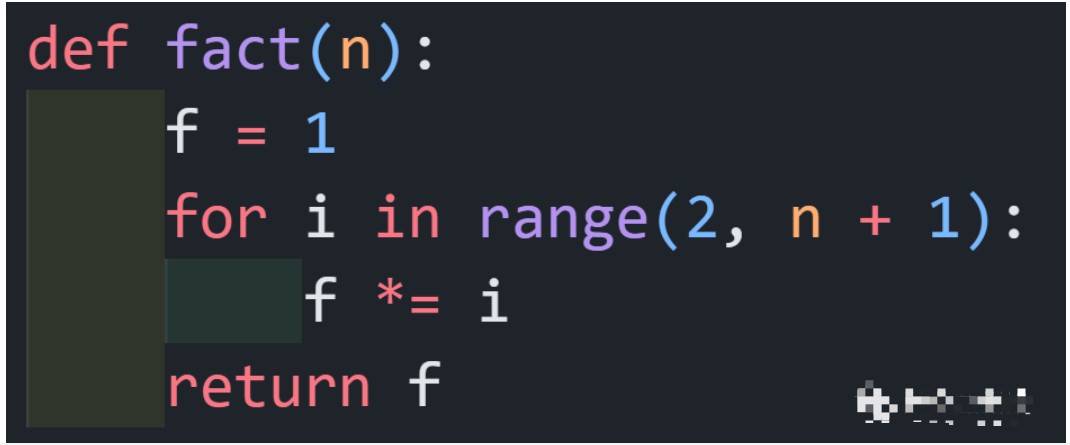
下面的分母,需要求階乘,這里也準(zhǔn)備一個(gè)小函數(shù)
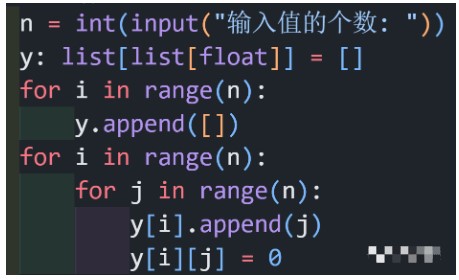
將輸入的值轉(zhuǎn)為整型,準(zhǔn)備一個(gè)list,將輸入的值輸入到空白的二維數(shù)值表。
就像這樣
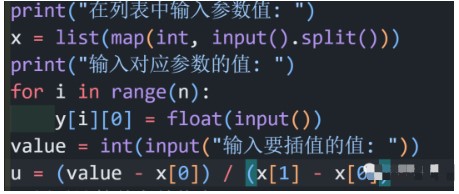
這個(gè)沒(méi)有什么好說(shuō)的,就是將輸入的值解到該有的位置,而且計(jì)算差分值。
審核編輯:劉清
-
算法
+關(guān)注
關(guān)注
23文章
4710瀏覽量
95381 -
矩陣
+關(guān)注
關(guān)注
1文章
434瀏覽量
35243 -
python
+關(guān)注
關(guān)注
56文章
4827瀏覽量
86741
發(fā)布評(píng)論請(qǐng)先 登錄
基于FPGA實(shí)現(xiàn)FOC算法之PWM模塊設(shè)計(jì)

基于FPGA的壓縮算法加速實(shí)現(xiàn)
VirtualLab Fusion應(yīng)用:參數(shù)優(yōu)化文檔介紹
PID控制算法的C語(yǔ)言實(shí)現(xiàn):PID算法原理
使用Python實(shí)現(xiàn)xgboost教程
請(qǐng)問(wèn)DAC39J84內(nèi)部插值方式是插值0嗎?
Teledyne Lecroy示波器插值算法
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+內(nèi)容簡(jiǎn)介
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+介紹基礎(chǔ)硬件算法模塊
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+第九章sigma delta adc閱讀與分享
【「從算法到電路—數(shù)字芯片算法的電路實(shí)現(xiàn)」閱讀體驗(yàn)】+一本介紹基礎(chǔ)硬件算法模塊實(shí)現(xiàn)的好書
【每天學(xué)點(diǎn)AI】前向傳播、損失函數(shù)、反向傳播





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論