") 無人機(jī)視覺導(dǎo)航國內(nèi)外研究現(xiàn)狀以及存在的問題
無人機(jī)視覺導(dǎo)航國內(nèi)外研究現(xiàn)狀以及存在的問題
導(dǎo)語
目前國內(nèi)外都在致力于針對無人機(jī)的GNSS拒止條件下的定位導(dǎo)航研究。其中視覺導(dǎo)航(Vision-Based Navigation,VBN)因抗干擾能力強(qiáng)、功耗低、成本低、體積小、設(shè)備結(jié)構(gòu)簡單、被動式、定位精度高等優(yōu)點(diǎn)得到了廣泛關(guān)注。近幾年隨著AI在計算機(jī)視覺領(lǐng)域的爆發(fā),不僅突破了之前很多難以解決的視覺難題,更極大提升了對圖像認(rèn)知的水平,因此VBN迅速成為導(dǎo)航領(lǐng)域的研究熱點(diǎn)。但是目前的技術(shù)還存在哪些問題需要解決呢?
1
引言
目前的組合導(dǎo)航系統(tǒng)基本上是以INS為主GNSS等為輔的導(dǎo)航方式。INS存在誤差積累,因此需要GNSS進(jìn)行修正,但GNSS衛(wèi)星信號落地功率僅-130dbm,頻段公開,極易被干擾,當(dāng)GNSS信號被干擾時,一般情況下可以利用IMU進(jìn)行航位推算,但隨著時間的推移,誤差累計嚴(yán)重,無人機(jī)無法完成預(yù)定任務(wù),甚至難以返航。因此在GPS拒止區(qū)域(如室內(nèi)、水下、叢林、城市樓群間、高山峽谷、作戰(zhàn)敵方干擾區(qū)等)如何完成無人機(jī)在自主飛行、定位、執(zhí)行任務(wù)是一個迫切的挑戰(zhàn)。
美國于2014年開始發(fā)展5項(xiàng)不依賴于GPS的導(dǎo)航技術(shù),包括Micro-PNT、ANS等項(xiàng)目。美國的諾斯羅普?格魯曼公司提出的Assured PNT(ASSURED POSITIONING, NAVIGATION AND TIMING)系統(tǒng)中,包含了對GPS拒止條件下的各類輔助導(dǎo)航方式,包括天文導(dǎo)航、地形匹配、激光測距/激光雷達(dá)、磁力計、里程計等方式。
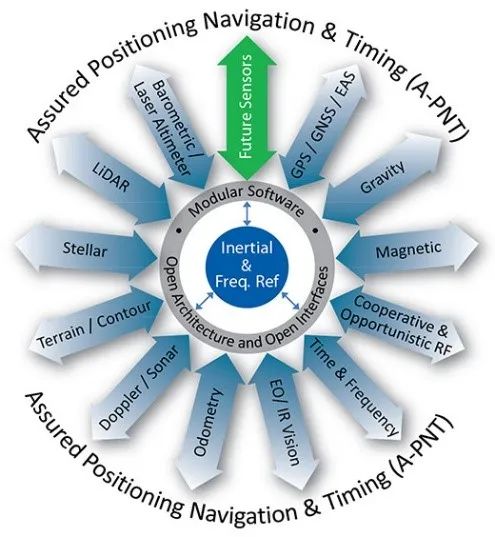
圖1 諾格公司的Assured PNT系統(tǒng)
視覺導(dǎo)航主要是指通過飛行器機(jī)載的視覺成像設(shè)備(可見光、紅外、SAR 等)對地拍照的圖像進(jìn)行各種導(dǎo)航參數(shù)的測量。視覺導(dǎo)航定位技術(shù)是通過圖像匹配算法結(jié)合含有地理位置信息的基準(zhǔn)圖實(shí)現(xiàn)的。
目前視覺導(dǎo)航按照是否需要導(dǎo)航地圖(即數(shù)字景象基準(zhǔn)數(shù)據(jù)庫)可分為地圖型導(dǎo)航和無地圖導(dǎo)航。地圖型導(dǎo)航需要使用預(yù)先存儲包含精確地理信息的導(dǎo)航地圖,利用一幀實(shí)拍圖像與導(dǎo)航地圖匹配即可實(shí)現(xiàn)飛行器的絕對定位。當(dāng)導(dǎo)航地圖采用景象圖或地形圖時,地圖導(dǎo)航可分為景象匹配導(dǎo)航和地形匹配導(dǎo)航。由于景象匹配制導(dǎo)的精度比地形匹配制導(dǎo)的精度高一個數(shù)量級,因此地形匹配制導(dǎo)一般用于中制導(dǎo),景象匹配制導(dǎo)一般用于末制導(dǎo)。
2
國內(nèi)外研究現(xiàn)狀以及存在的問題
景象匹配系統(tǒng)
國外對景象匹配系統(tǒng)的研究始于巡航導(dǎo)彈的制導(dǎo)。景象匹配制導(dǎo)利用目標(biāo)區(qū)的圖像信息進(jìn)行制導(dǎo),主要攻擊目標(biāo)為機(jī)場、交通樞紐、軍事基地等等。導(dǎo)彈的制導(dǎo)精度取決于實(shí)時圖質(zhì)量、基準(zhǔn)圖精度和匹配方法性能等。該方法實(shí)質(zhì)上是一種基于模板匹配的目標(biāo)定位方法。
景象匹配輔助導(dǎo)航系統(tǒng)具有自主性和高精度的突出優(yōu)點(diǎn),然而該技術(shù)仍未達(dá)到完全成熟的程度。景象匹配一般結(jié)合衛(wèi)星導(dǎo)航、慣性導(dǎo)航和地形匹配導(dǎo)航使用,其作用區(qū)域一般為數(shù)百平方米或數(shù)平方公里且存在以下問題:
(1) 嚴(yán)重依賴于離線基準(zhǔn)圖,是否能夠獲得高精度地圖也是景象匹配問題的關(guān)鍵因素之一,目前其制圖難度較大;
(2) 對于低空飛行、大起伏地形情況下時造成的視角變化,目前的算法效果較差;
(3) 由于基準(zhǔn)圖的制作往往較機(jī)載圖像傳感提前很長時間,地圖和機(jī)載圖像信息往往可能是在不同日期、不同傳感器、不同觀測點(diǎn)/角度、不同氣象條件下獲得的,因此需要景象匹配算法具備很強(qiáng)的光照、季節(jié)、角度不變性,而目前的傳統(tǒng)算法基本無法應(yīng)對不同傳感器、時間、季節(jié)、角度差下地理面貌發(fā)生的改變;
(4) 景象匹配技術(shù)可以為無人機(jī)提供實(shí)時的位置信息,因此應(yīng)具備高精度、實(shí)時計算等特性。而高精度和實(shí)時性受景象的特征點(diǎn)集合大小、匹配算法、搜索范圍、地圖大小等多方面的制約,因此基本只適用于小范圍內(nèi)定位導(dǎo)航。
地形匹配導(dǎo)航
地形匹配導(dǎo)航技術(shù)需要飛行路線上的地形數(shù)據(jù)作為基礎(chǔ),在飛行器飛行過程中,將實(shí)際飛行過程中測量到的地形高程數(shù)據(jù)與基準(zhǔn)地形數(shù)據(jù)進(jìn)行不斷比較來實(shí)現(xiàn)匹配定位,并對飛行器進(jìn)行導(dǎo)航修正。地形匹配主要利用雷達(dá)高度表和氣壓高度表等設(shè)備測量沿航線的地形高程數(shù)據(jù),按最佳匹配確定飛行器的地理位置。
地形匹配一般用于巡航導(dǎo)彈飛越特定地區(qū),可以修正INS的導(dǎo)航信息,消除INS的累計誤差,提高導(dǎo)航精度,但存在以下問題:
(1) 需要地形數(shù)據(jù)作為基礎(chǔ),對地形要求嚴(yán)格,使用中盡量回避地形特征貧乏的平坦地區(qū)和地形高程變劇烈的山區(qū);
(2) 需要高度表連續(xù)獲取地形高程序列,算法處理屬于后驗(yàn)證估計,實(shí)時性差,一般用于修正導(dǎo)航誤差;
(3) 對航向誤差敏感,定位過程中無法機(jī)動。
視覺SLAM技術(shù)
視覺SLAM為代表的技術(shù)在視覺導(dǎo)航領(lǐng)域主要以回環(huán)檢測(Loop Detection)、視覺重定位(Visual Re-localization)、視覺場景識(Visual Place Recognition)、視覺相對地形導(dǎo)航(visual terrain relative navigation)或地理配準(zhǔn)、圖像檢索為代表,近年隨著SLAM、深度學(xué)習(xí)和計算機(jī)視覺技術(shù)的發(fā)展有極大進(jìn)步,尤其以眾多海內(nèi)外高校、無人機(jī)/自動駕駛公司為主。
視覺的導(dǎo)航因采集信息豐富、成本低廉,在針對商用和工業(yè)無人機(jī)的自主降落、避障和跟飛應(yīng)用等特定條件下的研究取得了較大進(jìn)展。在商業(yè)無人機(jī)領(lǐng)域,美國的Skydio 2使用NVIDIA Jetson TX2的嵌入式AI計算設(shè)備,計算6個4K攝像頭采集到的圖像信息,實(shí)現(xiàn)了全自動避障功能。大疆無人機(jī)提出的Flight Autonomy是依靠由6個視覺傳感器、主相機(jī)、2組紅外傳感器、1組超聲波傳感器、GPS/GLONASS雙模衛(wèi)星定位系統(tǒng)、IMU和指南針雙冗余傳感器等實(shí)現(xiàn)的。當(dāng)GPS信號丟失時,無人機(jī)利用視覺傳感器與其他傳感器融合,可具備一定的全局定位和導(dǎo)航能力。
雖然目前商用和工業(yè)無人機(jī)、自動駕駛領(lǐng)域,暫時還沒有完全依賴視覺導(dǎo)航的產(chǎn)品,但已有不少高校和公司正在開展了基于視覺的全局定位導(dǎo)航系統(tǒng),如特斯拉的FSD(Full Self-Driving),目前發(fā)布的10.1版本拋棄了高精地圖和激光雷達(dá),主要依靠純視覺和AI可實(shí)現(xiàn)部分復(fù)雜場景下的自動駕駛能力,其路測結(jié)果顯示了視覺的巨大潛力。
定位地圖通常是使用Structure-from-Motion (SfM) 從一組數(shù)據(jù)庫圖像預(yù)先構(gòu)建3D場景點(diǎn)組成的,每個3D地標(biāo)可以與一組局部圖像描述符對應(yīng)。當(dāng)無人機(jī)獲取一張新的觀測即圖像后,系統(tǒng)可以利用從圖像特征和地標(biāo)之間2D-3D匹配中計算出相對或絕對位置。但是在無人機(jī)SLAM這類應(yīng)用中,因?yàn)榈貥?biāo)描述符的高內(nèi)存要求,將完整場景模型保留在設(shè)備上的定位方法通常僅限于較小的探索空間,如200m*200m。
在大場景(Large Scale)中,一般會將圖像回傳至地面服務(wù)器去執(zhí)行大規(guī)模的實(shí)時地圖重建、姿態(tài)估計、定位和跟蹤,并將結(jié)果回傳至無人機(jī)。但一般情況下如果GPS被干擾時,鏈路的可靠性也難以保證。
SeqSLAM利用連續(xù)幀序列圖像的相似度判斷地點(diǎn)匹配,是目前最成功的閉環(huán)檢測算法之一,能夠處理重大的環(huán)境條件變化,包括由于照明、天氣和一天中不同的時段等。但此方法多用于路邊駕駛等情況,對無人機(jī)在不同高度、角度飛行,且存在空中自由機(jī)動的情況還需要繼續(xù)補(bǔ)充研究。
另一方面,當(dāng)場景擴(kuò)大后,環(huán)境的復(fù)雜性會急劇增加,容易造成感知混淆。感知混淆是一種在不同的地方中產(chǎn)生相似的視覺區(qū)域現(xiàn)象,這通常會導(dǎo)致錯誤的定位,如圖2所示,同一個場景可能會檢索定位到地圖中不同的位置,從而造成定位錯誤。

圖2 大規(guī)模場景下的(城市級別)感知混淆
典型無人機(jī)自主視覺感知定位算法多見于地面無人車、機(jī)器人和小型商業(yè)無人機(jī),一般適用于小尺度規(guī)模場景。而傳統(tǒng)的景象匹配算法一般結(jié)合其他導(dǎo)航方式應(yīng)用于末制導(dǎo)等場合,使用條件受限。
GNSS拒止條件下當(dāng)無人機(jī)進(jìn)行長航程自主飛行時,需要研究解決長航時導(dǎo)航地圖的壓縮、存儲瓶頸問題,提升不同季節(jié)、光照、視角下的特征的穩(wěn)健性,提高圖像檢索和匹配算法的泛化性、準(zhǔn)確性,解決大規(guī)模地圖下的實(shí)時快速的搜索問題等。近年來AI技術(shù)的興起為VBN問題的解決提供了新的方式。
3
GNSS拒止環(huán)境下
VBN待解決的問題和措施
在GNSS信號受到干擾時可靠的視覺輔助導(dǎo)航應(yīng)具備高度的條件(季節(jié)、結(jié)構(gòu)、光照、異源傳感器等)和視角(不同視角、飛行高度)不變性,能夠部署在無人機(jī)的邊緣終端。
視角和外觀不變性的穩(wěn)健圖像/地圖表征
視覺導(dǎo)航某種程度上可以被視為一個圖像檢索任務(wù),必須使用相同的特征類型進(jìn)行模型構(gòu)建和匹配。當(dāng)無人機(jī)達(dá)到一定飛行高度,可以假設(shè)平面單應(yīng)性,但對地形變化較大的地區(qū)依然具備一定透視效果。機(jī)載圖像與地圖基準(zhǔn)圖像的成像時間、成像條件不同,即使經(jīng)過預(yù)處理校正后,依然可能會存在不同程度的光照差別、旋轉(zhuǎn)與角度變化、季節(jié)變化、植被變化等,如果地圖表征不當(dāng),極易導(dǎo)致錯誤匹配,需要提取穩(wěn)健的成像條件不變性和視角、尺度不變性的地圖場景表征。同時,考慮到機(jī)載計算平臺有限的存儲資源和計算資源,因此地圖場景表征同時也要具備高效、低冗余描述等特點(diǎn)。
場景和地圖的描述通常分為局部特征描述子(例如SIFT和SURF特征)以及全局描述子(如Gist等)。局部特征描述在像素級別上使用固定的局部空間鄰域進(jìn)行優(yōu)化描述,具備視角旋轉(zhuǎn)不變性且可實(shí)現(xiàn)高精度的定位;而全局描述子對位置進(jìn)行了優(yōu)化,通常在直接對外觀和光照變化方面魯棒性更強(qiáng),但增加視角不變性將不可避免地降低一定程度的外觀不變性。
因此需要采用基于深度學(xué)習(xí)將核心的局部特征納入全局描述符形成新的表征,學(xué)習(xí)過程采用基于注意力機(jī)制,例如Transformers和圖神經(jīng)網(wǎng)絡(luò)(Graph Neural Networks)。這其中,網(wǎng)絡(luò)的底層輸出對外觀變化更具備穩(wěn)健性,而高層輸出對視角變換更具備穩(wěn)健性,因此學(xué)習(xí)到的特征能夠有效地應(yīng)對環(huán)境以及視角的變化。比如SuperPoint、D2、R2D2等深度學(xué)習(xí)特征代替?zhèn)鹘y(tǒng)SIFT、SURF等局部特征,具備更好的視角不變性;采用如NetVLAD、CALC等用神經(jīng)網(wǎng)絡(luò)模擬傳統(tǒng)特征提取策略,可獲得更好的魯棒性。
實(shí)時可靠的高精度視覺導(dǎo)航匹配
當(dāng)GNSS信號丟失時間較長時,慣導(dǎo)的定位誤差累積,需要視覺導(dǎo)航在較大范圍內(nèi)進(jìn)行搜索,這樣會極大增加匹配算法的計算量。雖然利用語義和傳統(tǒng)圖像檢索技術(shù),可以粗篩出一組與當(dāng)前機(jī)載圖像相似的地圖圖像,供后續(xù)精細(xì)搜索,但隨著地圖和搜索規(guī)模的擴(kuò)大,視覺導(dǎo)航的感知混疊現(xiàn)象越來越嚴(yán)重,粗篩的結(jié)果會含有越來越多的不相關(guān)。因此需要研究快速的圖像檢索和圖像匹配技術(shù)。
視覺輔助導(dǎo)航系統(tǒng)的核心是圖像匹配算法的選擇,該算法要解決的關(guān)鍵問題是異源圖像之間的實(shí)時可靠匹配。大多數(shù)最先進(jìn)的圖像描述和表征都是高維的(維度從512到70,000不等)。隨著無人機(jī)飛行時間的增加,視覺導(dǎo)航搜索的空間急劇變大,而且當(dāng)無人機(jī)長期自主時,通常必須使用多個地圖參考集。若匹配算法過于復(fù)雜,搜索效率將會降低,會導(dǎo)致整個匹配過程耗時過長,影響導(dǎo)航效果。
因此,設(shè)計分層的實(shí)時可靠視覺導(dǎo)航匹配技術(shù)。首先利用,對高維的描述符空間進(jìn)行投影、量化和聚類,以最小的精度損失提高了最近鄰 (NN)搜索的效率采,用反向索引加速圖像檢索速度,選擇出最佳的候選地點(diǎn)集合(如排名前20個地點(diǎn))。然后在候選地圖集合中,利用航拍成像條件和地圖信息,利用幾何信息,實(shí)時解算出飛機(jī)的絕對位置和姿態(tài)。
此外,場景的語義線索不像像素強(qiáng)度那樣容易受到條件變化的影響,因此可以采用基于深度學(xué)習(xí)的物體檢測和語義信息分割技術(shù),對場景進(jìn)行識別、跟蹤和語義的標(biāo)記,可以剔除部分場景中的無效區(qū)域(如空中云彩等),重點(diǎn)利用外觀不變的對象如標(biāo)志性建筑形成穩(wěn)定的圖像描述符,可加速地圖匹配和搜索的過程。同時利用環(huán)境的動/靜分割加強(qiáng)無人機(jī)對地圖場景的理解,可以適應(yīng)地圖一定程度的動態(tài)變化。
視覺導(dǎo)航在有限計算資源機(jī)載平臺的部署
傳統(tǒng)的視覺輔助導(dǎo)航技術(shù)難以突破在不同場景下的可靠定位瓶頸,基于深度學(xué)學(xué)習(xí)的技術(shù)在場景光照變化大,相機(jī)視野變化大等方面對傳統(tǒng)方法形成碾壓性優(yōu)勢,是未來基于視覺無人機(jī)導(dǎo)航發(fā)展的必然趨勢。但是深度學(xué)習(xí)技術(shù)計算量大,參數(shù)動輒百萬級,現(xiàn)有的CPU、FPGA等傳統(tǒng)機(jī)載計算平臺難以滿足實(shí)時性的計算要求。隨著低成本低功耗的AI加速芯片的推出,可將深度學(xué)習(xí)模型部署到無人機(jī)平臺,利用AI芯片的異構(gòu)加速技術(shù),降低視覺導(dǎo)航流程的時延,不僅可以實(shí)現(xiàn)態(tài)勢感知、目標(biāo)識別跟蹤等任務(wù),更可以利用圖像語義分析的信息,無人機(jī)視覺導(dǎo)航定位,使其更適用與動態(tài)環(huán)境下的自主飛行。
·
總結(jié)
視覺導(dǎo)航但因成像時存在不同季節(jié)、光照、視角、傳感器等原因,其使用收到較大限制。同時,如何處理大規(guī)模地圖的建圖和搜索也是部署到無人機(jī)終端一個亟待解決的問題。近年來,隨著AI技術(shù)的發(fā)展,國內(nèi)外各研究機(jī)構(gòu)陸續(xù)開展了VBN問題的研究,并進(jìn)行了各種實(shí)際數(shù)據(jù)采集和應(yīng)用挑戰(zhàn)賽,如近年來ICCV等會議陸續(xù)推出場景識別比賽等。后續(xù)可充分借鑒自動駕駛、商用無人機(jī)、機(jī)器人等先進(jìn)技術(shù),結(jié)合長航程自主飛行的傳感器特點(diǎn)、使用需求、計算資源等進(jìn)行研究和測試。
審核編輯 :李倩
-
無人機(jī)
+關(guān)注
關(guān)注
230文章
10693瀏覽量
185297 -
圖像傳感
+關(guān)注
關(guān)注
0文章
20瀏覽量
14666 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14173瀏覽量
169217
原文標(biāo)題:無人機(jī)視覺導(dǎo)航,還有哪些問題需要解決?
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
肇觀電子兩款無人機(jī)視覺避障模組量產(chǎn)交付
愛普生TG2520SMN溫補(bǔ)晶振在無人機(jī)導(dǎo)航與通信的應(yīng)用

《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總
無人機(jī)傳感器線圈的設(shè)計與制造工藝詳解
北斗模塊在無人機(jī)領(lǐng)域的革新應(yīng)用與未來展望
革新無人機(jī)導(dǎo)航:如何重新定義IMU高性能低成本
精準(zhǔn)導(dǎo)航的關(guān)鍵:揭秘GNSS模擬器在無人機(jī)行業(yè)的核心作用
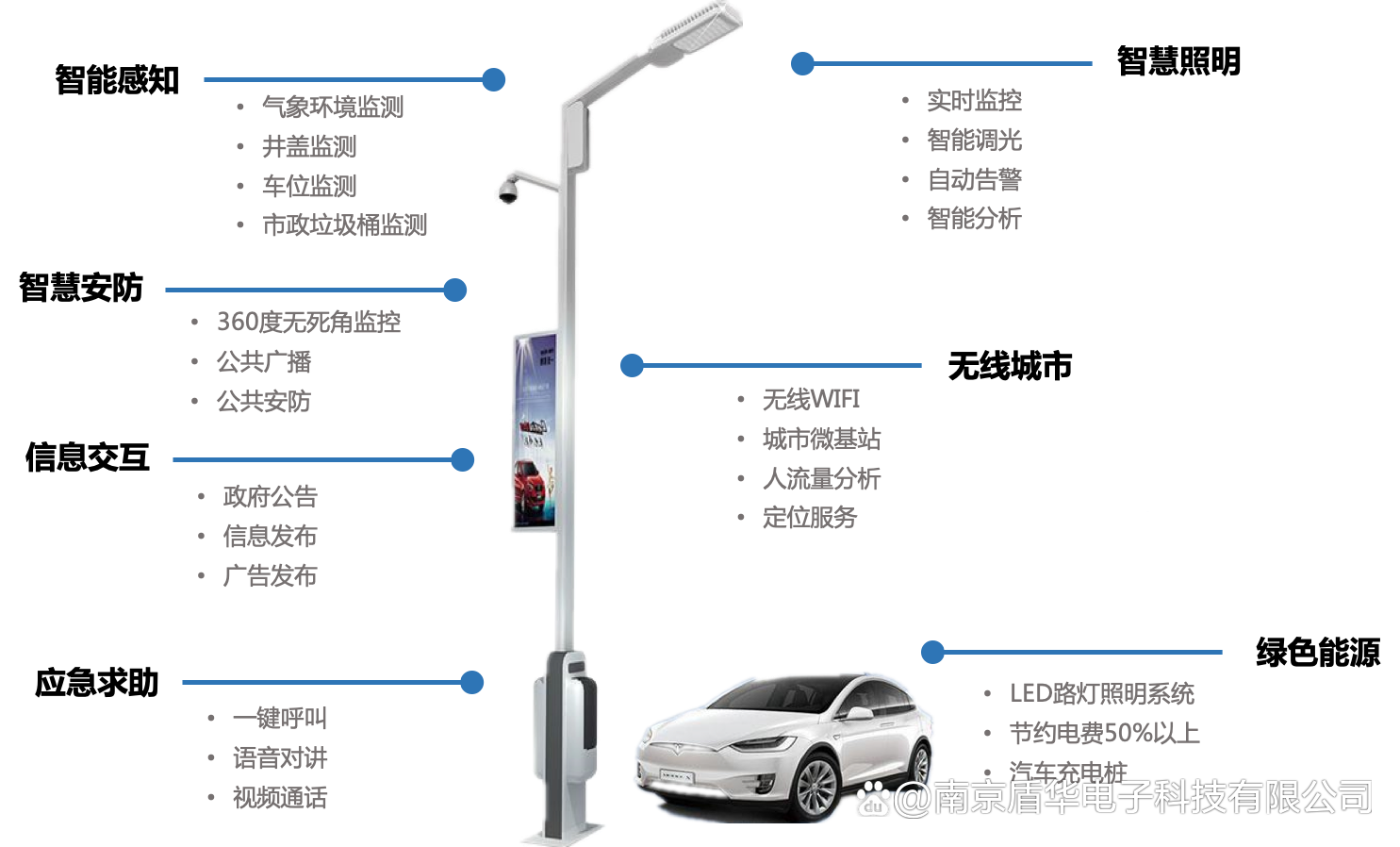
2024年智慧路燈國內(nèi)外應(yīng)用案例(節(jié)選)智慧路燈案例
知語科技無人機(jī)反制系統(tǒng)的應(yīng)用與挑戰(zhàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論