 步進電機S型曲線加減速的實現
步進電機S型曲線加減速的實現
之前做電機相關的項目比較少,最近有個項目涉及到步進電機的精確控制,參考了一些資料研究了一下S型曲線加減速,這里總結一下分享給大家。
STM32定時器輸出PWM,控制驅動器來驅動步進電機。單片機只要控制電機方向,以及PWM的頻率即可,具體驅動由驅動器實現。 首先說一下什么是S型曲線加速,為什么要S型曲線加速。
S型曲線加速是指步進電機的啟動速度按照S型曲線逐漸增加,以達到設定的最大速度。具體的S型曲線方程如下:
 x取值-5~5的曲線圖如下:
x取值-5~5的曲線圖如下: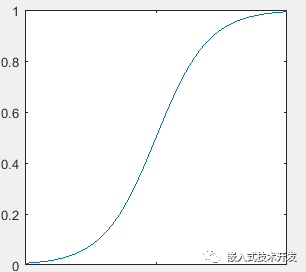 可以看到,剛開始加速和達到最大速度時加速比較緩慢,中間加速比較快。電機的轉矩和轉速的乘積的k倍等于功率,也就是說,功率一定的時候,轉速與轉矩成反比關系。所以,轉速越低,轉矩越大。當電機直接高速啟動時,電機可能存在震動、丟步甚至啟動不起來的情況。因此需要S型曲線加速,使電機能夠緩慢啟動。程序實現控制電機的速度,其實就是控制PWM的輸出頻率。首先需要對S曲線方程進行一些變化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )
可以看到,剛開始加速和達到最大速度時加速比較緩慢,中間加速比較快。電機的轉矩和轉速的乘積的k倍等于功率,也就是說,功率一定的時候,轉速與轉矩成反比關系。所以,轉速越低,轉矩越大。當電機直接高速啟動時,電機可能存在震動、丟步甚至啟動不起來的情況。因此需要S型曲線加速,使電機能夠緩慢啟動。程序實現控制電機的速度,其實就是控制PWM的輸出頻率。首先需要對S曲線方程進行一些變化,如下:Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -Flexible(i - num )/num) )-
Fcurrent為計算出的當前頻率。
-
Fmin為加速的起始頻率。
-
Fmax為加速的最大頻率。
-
-Flexible*(i - num)/num是對S型曲線進行拉伸變化,其中Flexible代表S曲線區間(越大代表壓縮的最厲害,中間加速度越大;越小越接近勻加速。理想的S曲線的取值為4-6)。
-
i是在循環計算過程中的索引,從0開始。
-
num為 加速脈沖數/2 大小。
TIM2_CLOCK_FREQ為定時器的計數頻率。 之后要做的就是在加減速過程中,每輸出一個PWM脈沖,重新裝載一次定時器周期。具體怎樣輸出指定個數PWM來控制步進電機,可參考之前的文章《STM32定時器產生指定個數脈沖》。在PWM中斷中,將計算好的S曲線數組,重新裝載到定時器的ARR和CCR寄存器中即可。程序如下://功能:S加速曲線初始化//參數1 *pbuff 計算出的定時器的周期//參數2 fre_max 最大頻率 Hz//參數3 fre_min 最小頻率 Hz//參數4 len 加速需要的脈沖數void CurveS_init(uint16_t *pbuff,uint32_t fre_max,uint32_t fre_min,int16_t len){int16_t i;uint16_t flexible =4;floatdelt=fre_max-fre_min;floatdeno;float melo ;floatfre;for(i=0; i{melo = flexible* (i-len/2) / (len/2);deno = 1.0f / (1 + expf(-melo)); //fre = delt * deno + fre_min;*pbuff++ = (unsigned short)(TIM2_CLOCK_FREQ / fre);}}
//PWM回調函數void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim){Motor.PWMcount++;SpeedAdjust();//速度調節}//速度調節函數void SpeedAdjust(void){switch(Motor.Status){/*加速*/case SPEED_INCREASE:if(Motor.Count < Motor.CountMax){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//計算下一個PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;//占空比50%Motor.Count++;//加速次數}else{Motor.Status = SPEED_STABLE;Motor.Count--;}break;/*勻速*/case SPEED_STABLE:if(Motor.PWMcount >= (Motor.PWMneed - Motor.Count)){Motor.Status = SPEED_DECREASE;}break;/*減速*/case SPEED_DECREASE:if(Motor.Count >= 0){__HAL_TIM_SET_AUTORELOAD(&htim2,Period[Motor.Count]);//計算下一個PWM的周期htim2.Instance->CCR1 = Period[Motor.Count]/2;Motor.Count--;}if(Motor.PWMcount >= Motor.PWMneed){HAL_TIM_PWM_Stop_IT(&htim2,TIM_CHANNEL_1);}break;default :break;}
其中Motor是自己定義的一個結構體:
啟動時,初始化參數,啟動定時器輸出PWM即可:typedef struct{uint8_t Status; //狀態int32_t Count; //加減速過程脈沖計數int32_t CountMax; //最大加速脈沖數uint32_t PWMcount;//PWM計數uint32_t PWMneed; //需要輸出的PWM總數}Motor_t;
來看一下效果,可以看到,PWM的頻率是逐漸增大的。實際測試效果也不錯。//PWM--需要輸出的脈沖個數void StartPWM(uint32_t PWM){Motor.PWMcount = 0;Motor.PWMneed = PWM;Motor.Count = 0;Motor.Status = SPEED_INCREASE;Motor.CountMax = 300;//初始化加速曲線,最小頻率100,最大頻率10K,加速脈沖數300CurveS_init(Period,10000,100,Motor.CountMax);__HAL_TIM_SET_AUTORELOAD(&htim2,Period[0]);htim2.Instance->CCR1 = Period[0];HAL_TIM_PWM_Start_IT(&htim2, TIM_CHANNEL_1); //啟動定時器PWM輸出}
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
54文章
8609瀏覽量
148982 -
步進電機
+關注
關注
152文章
3154瀏覽量
149085
原文標題:步進電機S型曲線加速的實現
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
實時生成步進電機速度曲線
一種用于步進電機加速度的新算法可以實現速度曲線的實時參數化和計算。該算法可以在低端微控制器上運行,只使用簡單的定點算術運算并且不使用數據表。它以恒定的加速度和
發表于 05-14 15:09
線性模組為什么會限定一個加減速時間?
在工業自動化領域,線性模組作為精密傳動系統的核心部件,其加減速時間的設定直接影響設備性能與壽命。通過對運動控制原理的深入分析可以發現,加減速時間的限定是機械結構強度、電機特性、運動精度、能耗管理等

網絡筆記分享-實時生成步進電機速度曲線
一種用于步進電機加速度的新算法可以實現速度曲線的實時參數化和計算。該算法可以在低端微控制器上運行,只使用簡單的定點算術運算并且不使用數據表。它以恒定的加速度和
發表于 03-04 21:17
行星減速步進電機有什么作用?怎么運作的?
行星減速機在減速步進電機中扮演著至關重要的角色。其主要作用是通過使用行星齒輪組來減小輸出轉速并增大輸出扭矩。這種設計使得步進

步進電機的控制實現方法
電機能夠實現高精度的位置控制和速度控制。本文將詳細介紹步進電機的控制實現方法,包括基本的控制原理、常見的控制策略以及實際應用中的注意事項。

行星減速步進電機與步進電機的區別
步進電機是一種將電脈沖信號轉變為角位移或線位移的開環控制電機。其工作原理是通過電子電路將直流電分為多相序控制電流,使用這種電流給步進電機供電




基于STM32單片機的步進電機控制系統設計
系統內使用按鍵進行步進電機的控制,可以控制步進電機的啟動和關閉,使用按鍵進行加速和減速以及進行旋轉方向的改變。
伺服電機加減速機慣量怎么計算
伺服電機加減速機系統是現代工業自動化領域中常見的一種傳動裝置,它通過將伺服電機的高速旋轉轉化為減速機的低速大扭矩輸出,實現對負載的精確控制。





 工商網監
工商網監
評論