") 基于Robei EDA工具的隔離病房看護(hù)機(jī)器人設(shè)計
基于Robei EDA工具的隔離病房看護(hù)機(jī)器人設(shè)計
摘要
基于對病房護(hù)理機(jī)器人行業(yè)的分析,發(fā)現(xiàn)機(jī)器人能夠為人類帶來醫(yī)療手術(shù)、診治、體溫檢測、配送、消毒殺菌的服務(wù),市面上的病房護(hù)理機(jī)器人不能夠滿足靈活多變的機(jī)器人需求,再加上受新冠疫情的影響,全球服務(wù)機(jī)器人市場規(guī)模增長快速,預(yù)計2021年市場容量占比率達(dá)36%。不同于目前市場上機(jī)器人的嵌入式設(shè)計,本項目的機(jī)器人創(chuàng)新采用了 FPGA 芯片,并利用國產(chǎn) Robei EDA 工具進(jìn)行設(shè)計和仿真。根據(jù)疫情防控以及病房隔離的需求,設(shè)計一款基于Robei EDA工具的看護(hù)機(jī)器人具備病患狀態(tài)監(jiān)測、病房環(huán)境監(jiān)測、 無接觸式運(yùn)送服務(wù)、娛樂休閑服務(wù)四大基本功能。經(jīng)過系統(tǒng)設(shè)計與調(diào)試,機(jī)器人可以達(dá)到預(yù)期的要求,隨著時間的推移,機(jī)器人還可以不斷地完善,可以更好的為行業(yè)服務(wù)。
0 作品功能
病患狀態(tài)監(jiān)測:機(jī)器人通過分析采集的實時圖像信息,檢測目標(biāo)對象,并了解病患的運(yùn)動方向,進(jìn)而觸發(fā)機(jī)器人完成跟隨病患的功能;
病房環(huán)境監(jiān)測:機(jī)器人通過對采集的實時圖像信息進(jìn)行動態(tài)監(jiān)測分析,進(jìn)而觸發(fā)機(jī)器人完成攝像頭機(jī)械臂運(yùn)動控制功能實現(xiàn)對病房環(huán)境的監(jiān)控;
無接觸式運(yùn)送服務(wù):機(jī)器人通過藍(lán)牙獲取用戶手機(jī)APP發(fā)送的指令,執(zhí)行尋跡、遙控、機(jī)械臂運(yùn)動功能,進(jìn)而實現(xiàn)機(jī)器人物品運(yùn)送;
娛樂休閑服務(wù):機(jī)器人開創(chuàng)性的增加了娛樂休閑功能,通過移植貪吃蛇游戲,以及開發(fā)井字棋人機(jī)大戰(zhàn),實現(xiàn)人機(jī)互動,為患者提供娛樂休閑服務(wù)。
1 項目架構(gòu)
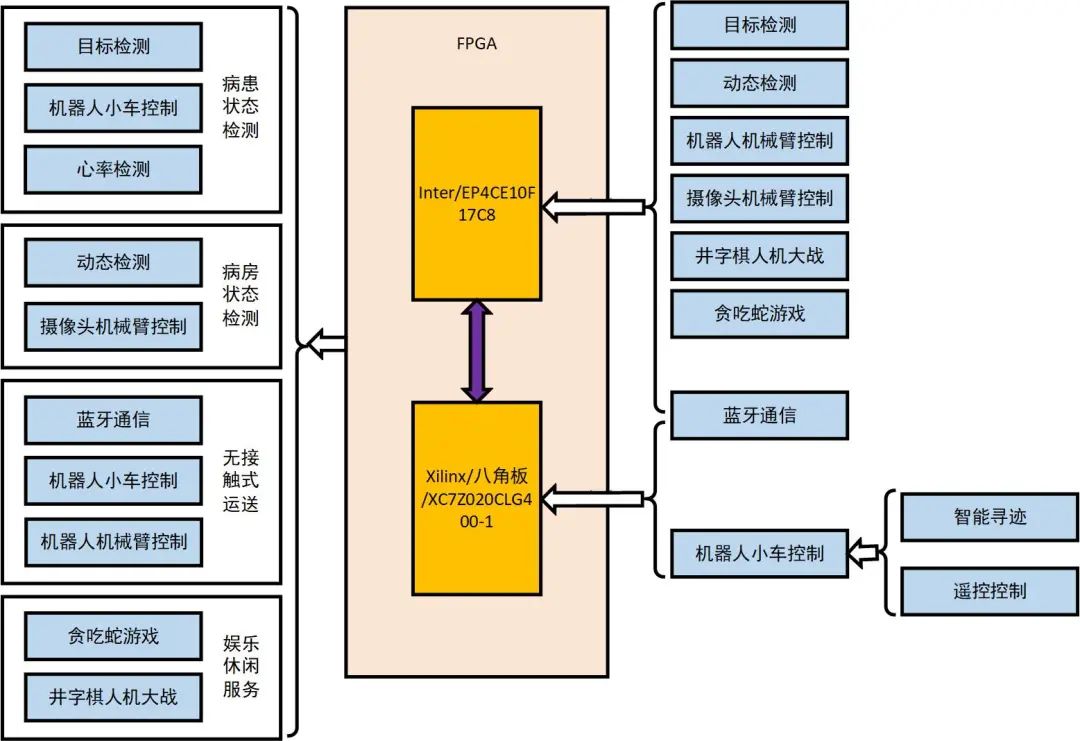
由于主控制板AC620/Inter/EP4CE10F17C8開發(fā)板完成整個系統(tǒng)的大部分功能芯片資源已占82%,包括視頻圖像采集、兩個機(jī)械臂控制、藍(lán)牙通信、貪吃蛇四大模塊,幀差、中值濾波、形態(tài)學(xué)算法、井字棋人機(jī)大戰(zhàn)算法等四大算法,獨(dú)立完成病患狀態(tài)檢測、娛樂休閑服務(wù)兩大功能;增加第二塊若貝八角板/Xilinx/XC7Z020CLG400-1 FPGA開發(fā)板完成包括機(jī)器人小車控制(智能尋跡、遙控小車)、藍(lán)牙通信兩大模塊,PID算法、中值濾波兩大算法,與主控制板共同完成病患狀態(tài)檢測(AC620負(fù)責(zé)病患目標(biāo)檢測獲取位置信息觸發(fā)八角板機(jī)器人小車跟隨運(yùn)動)、無接觸式運(yùn)送(AC620負(fù)責(zé)物品抓取與精準(zhǔn)投放、八角板負(fù)責(zé)物品運(yùn)送,都由手機(jī)發(fā)送指令控制)兩大功能。整體架構(gòu)設(shè)計如下圖所示。
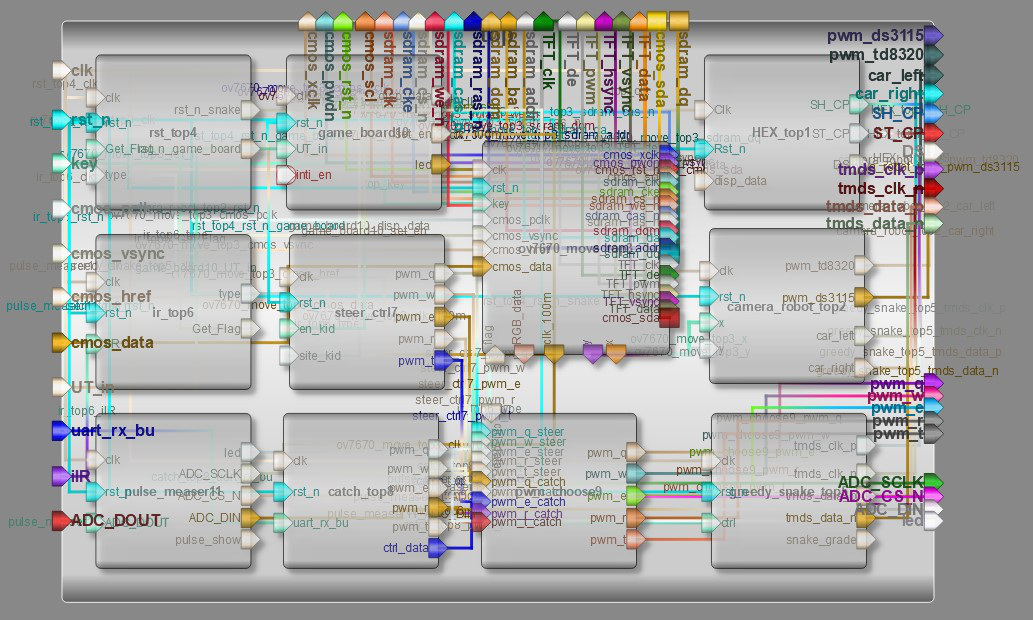
AC620 Robei工程頂層架構(gòu)如下圖所示。
2 系統(tǒng)架構(gòu)設(shè)計
2.1 圖像處理模塊
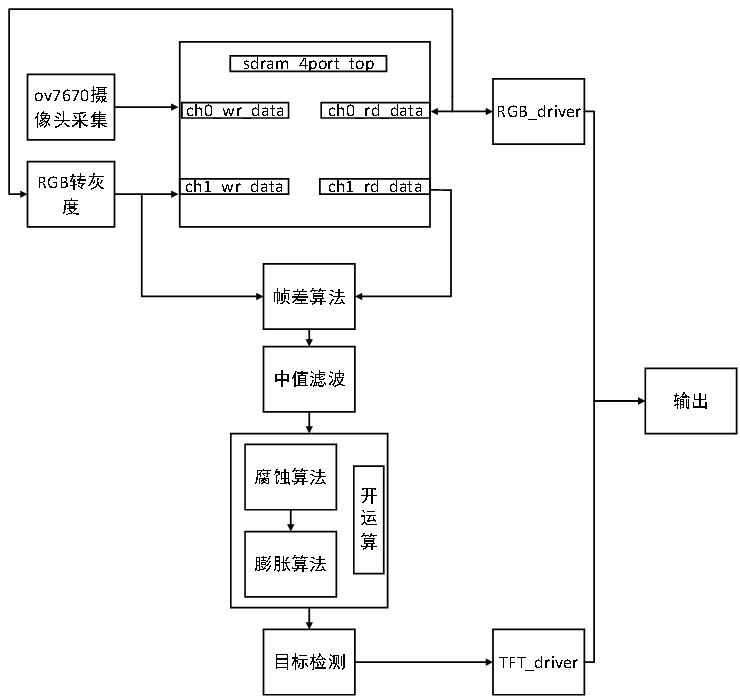
為了實現(xiàn)物體的動態(tài)檢測以及目標(biāo)檢測,所以需要完成對圖像的采集、存儲和處理。利用攝像頭ov7670采集圖像信息,存入SDRAM中,其后利用采集存儲的圖像經(jīng)過灰度化、幀差法、中值濾波、形態(tài)學(xué)算法開運(yùn)算實現(xiàn)物體的動態(tài)檢測以及目標(biāo)識別。圖像處理總體架構(gòu)如下圖。
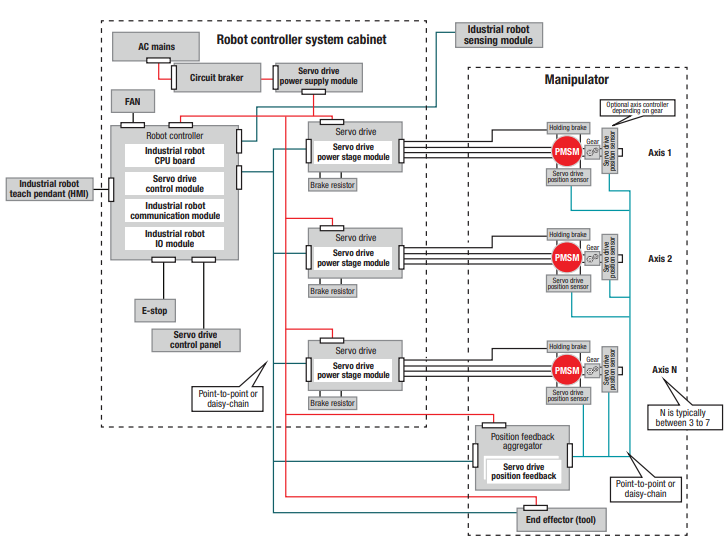
2.2 機(jī)器人運(yùn)動控制模塊
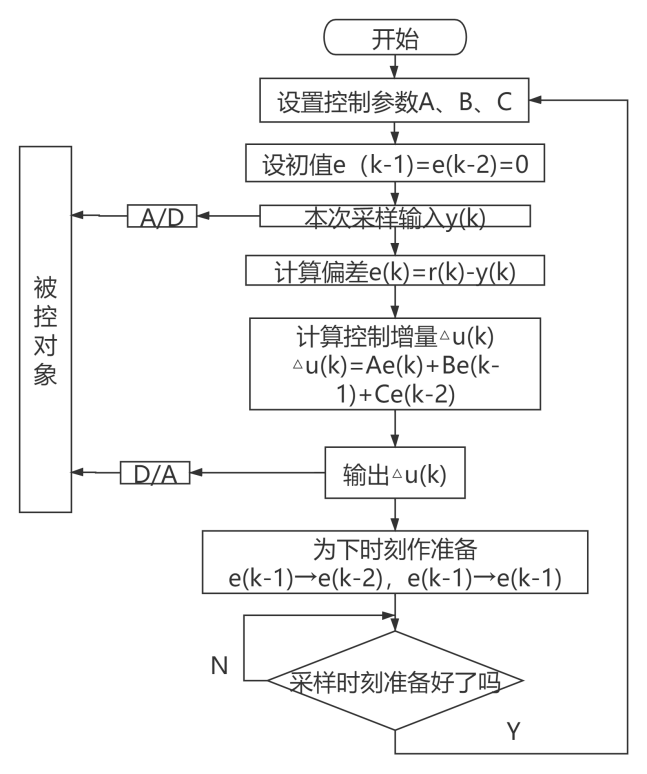
首先通過增量型碼盤得到電機(jī)每轉(zhuǎn)過單位角度的脈沖信號即A相、B相輸出,通過取A相、B相的上升和下降沿進(jìn)行4倍頻得到電機(jī)轉(zhuǎn)動速度,作為PID控制的反饋輸入,從而維持電機(jī)一定的速度進(jìn)行轉(zhuǎn)動及機(jī)器人小車穩(wěn)定前進(jìn)。增量型PID算法流程圖如下圖。
然后通過超聲波模塊得到機(jī)器人小車與與前方物體之間的距離,當(dāng)小于50cm的時候給機(jī)器人小車控制模塊使能信號控制小車的運(yùn)動,停止或者前進(jìn)。也可以通過5路循跡模塊輸出的1,0信號(檢測到白色給值1,黑色給值0),將這些控制信號轉(zhuǎn)化為左轉(zhuǎn)、右轉(zhuǎn)、前進(jìn)信號連接到機(jī)器人小車控制模塊,來實現(xiàn)小車對設(shè)定軌道的識別循跡。還可以利用手機(jī)APP通過藍(lán)牙通信發(fā)送控制指令,到藍(lán)牙通信模塊將指令轉(zhuǎn)化為對機(jī)器人小車的控制信號,從而對機(jī)器人小車進(jìn)行控制。
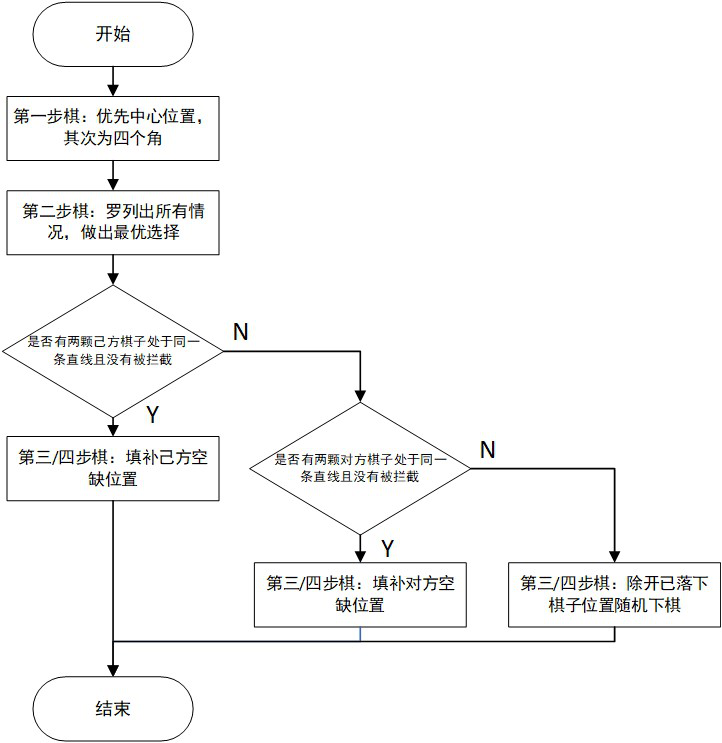
2.3 井字棋游戲模塊
首先人機(jī)大戰(zhàn)井字棋游戲功能首先要從智能棋盤出得到對弈選手落下棋子的位置,caculate計算模塊分析對手所走棋的位置進(jìn)而了智能計算下一步機(jī)器人棋子落下的位置,將位置信號及運(yùn)動使能信號傳輸給auto_chess模塊完成對機(jī)械臂的控制,實現(xiàn)機(jī)械臂抓取棋子并將棋子放在計算模塊給定的位置處,實現(xiàn)人機(jī)游戲的交互。井字棋算法流程圖如下圖。
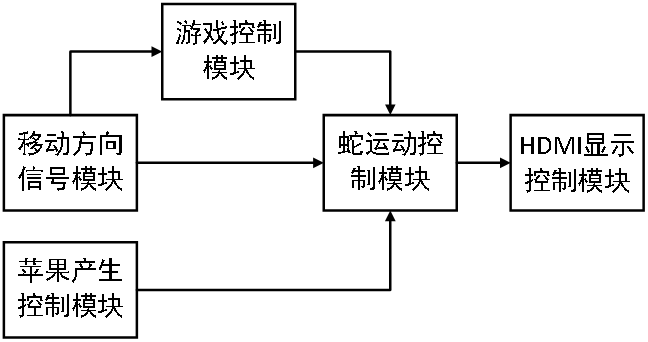
2.4 貪吃蛇游戲模塊
移動方向模塊(snake_direction_ctrl)獲得外部遙控器移動方向的按鍵控制信息,進(jìn)而控制游戲模塊(game_ctrl)與隨機(jī)蘋果(snake_apple)產(chǎn)生電路一起控制蛇的運(yùn)動模式(snake_mod)、最后通過HDMI顯示電路(vga_top)完成可視化顯示。(HDMI顯示電路需要單獨(dú)的工作時鐘,所需還需要一個PLL鎖相環(huán)電路(pll_hdmi)提供HDMI驅(qū)動時鐘)。貪吃蛇算法移植框圖如下圖。
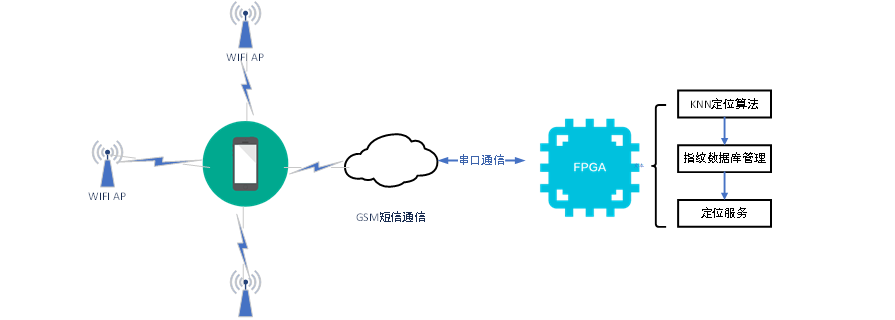
2.5 WiFi定位模塊
在室內(nèi)環(huán)境根據(jù)一些WiFi的接入點(diǎn)和移動設(shè)備進(jìn)行位置指紋法定位。主要分為兩個階段:離線階段和在線階段。在離線階段,為了采集各個位置上的指紋,構(gòu)建一個數(shù)據(jù)庫,需要在指定的區(qū)域進(jìn)行繁瑣的勘測,采集好的數(shù)據(jù)有時也稱為訓(xùn)練集。在在線階段,系統(tǒng)將根據(jù)KNN算法估計待定位的移動設(shè)備的位置。WiFi定位的實現(xiàn)如下圖。
3 項目總結(jié)
隨著決賽的完美落幕,我們的項目也算是告一段落。目前我們設(shè)計的這一款基于Robei EDA工具的隔離病房看護(hù)機(jī)器人已經(jīng)基本完成了預(yù)期目標(biāo)。該機(jī)器人實現(xiàn)了目標(biāo)追隨(實時監(jiān)控+跟蹤行走)、自主循跡行走、遙控行走、輔助抓取物體、人機(jī)互動游戲、心率檢測等功能。
在整個項目設(shè)計過程中,我們合理分工并根據(jù)根據(jù)要求規(guī)劃時間進(jìn)度。在項目初期,小組在查閱相關(guān)資料后確定項目設(shè)計方向,并多次與指導(dǎo)老師進(jìn)行討論,直至確定命題,以目前新冠疫情持續(xù)籠罩的背景下,推出一款隔離病房看護(hù)機(jī)器人,旨在為醫(yī)護(hù)人員減輕醫(yī)療負(fù)擔(dān)與潛在感染風(fēng)險;項目中期,小組成員開始分模塊進(jìn)行項目設(shè)計,圖像處理和機(jī)械臂處理是我們重點(diǎn)設(shè)計的方向;在項目調(diào)試期間,小組成員采用分-總的方式進(jìn)行測試工作,以保證發(fā)生錯誤后能夠最快速地解決;最后在收尾工作時,由于小組成員在平時設(shè)計時大多保存了設(shè)計過程的記錄,所以在收尾總結(jié)時省去了不好力氣,再加上指導(dǎo)老師多次的耐心修改,收尾工作完成地很順利。
心得體會
在歷時幾個月的項目設(shè)計中,小組成員一直不斷重復(fù)著發(fā)現(xiàn)問題、思考問題、解決問題的循環(huán)中度過。整個過程中遇到了很多問題,但也從中學(xué)到了很多。
(1) 項目的實用型很重要:創(chuàng)新一直是我們不斷追求的目標(biāo),我們往往會忽視實用的重要性。在最開始選題時,我們小組成員都一心撲在了如何突出創(chuàng)新點(diǎn),想了很多選題都缺乏實用型,但指導(dǎo)老師及時建議我們更換思路然后最終確定選題方向。
(2) 抗壓能力很重要:在這樣一個慢周期的項目進(jìn)展過程中,最考驗人的就是心態(tài)的調(diào)整。經(jīng)常會遇到一個問題尚未解決另一個問題接踵而至的情況,在這期間我們可能一個功能的模塊都會更換很多種。在不斷磨煉地過程中,抗壓能力也得到了提高。
(3) 增強(qiáng)了的團(tuán)隊感:在組長的部署安排下,整個團(tuán)隊氛圍感很融洽,這也為項目設(shè)計營造了一個良好的工作環(huán)境。在互相協(xié)作的過程中,也增進(jìn)了合作的默契,為更好地完成項目提供了良好的條件。
最終,十分感謝我們的指導(dǎo)老師,總是耐心地給出針對性的意見。同時感謝主辦方,為我們這些FPGA愛好者提供平臺進(jìn)行交流學(xué)習(xí)。
審核編輯 :李倩
-
FPGA
+關(guān)注
關(guān)注
1643文章
21954瀏覽量
613996 -
圖像采集
+關(guān)注
關(guān)注
2文章
306瀏覽量
41564 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29469瀏覽量
211522
原文標(biāo)題:【2021集創(chuàng)賽作品分享】第十四期 | 基于Robei EDA工具的隔離病房看護(hù)機(jī)器人設(shè)計
文章出處:【微信號:Ithingedu,微信公眾號:安芯教育科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
盤點(diǎn)#機(jī)器人開發(fā)平臺
工業(yè)機(jī)器人設(shè)計工程師必備指南免費(fèi)下載
人形機(jī)器人設(shè)計中,哪些關(guān)鍵部位需要功率器件?典型電壓/電流參數(shù)如何設(shè)計?
名單公布!【書籍評測活動NO.58】ROS 2智能機(jī)器人開發(fā)實踐
基于Raspberry Pi 5的情感機(jī)器人設(shè)計

Robei EDA設(shè)計工具全新升級
為什么要費(fèi)這么大勁讓機(jī)器人像人一樣,而不是更實用的形態(tài)?
春晚“熱舞”的人形機(jī)器人 多臺無人設(shè)備協(xié)作的硬實力

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗】2.具身智能機(jī)器人大模型
機(jī)器人仿真的類型和優(yōu)勢

工業(yè)機(jī)器人常用的編程方式
3D霍爾效應(yīng)傳感器在機(jī)器人設(shè)計中的機(jī)械優(yōu)勢






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論