") 永磁同步電機(jī)的控制
永磁同步電機(jī)的控制
一、什么是力矩控制
永磁同步電機(jī)在汽車(chē)上的應(yīng)用越來(lái)越廣泛,從動(dòng)力驅(qū)動(dòng)到轉(zhuǎn)向剎車(chē)的執(zhí)行機(jī)構(gòu),都可以見(jiàn)到其蹤影。今天想談?wù)動(dòng)来磐诫姍C(jī)的控制。
做控制的人都知道,任何電機(jī)的控制,無(wú)非三種不同的控制目標(biāo):
位置控制:想讓電機(jī)轉(zhuǎn)多少度它就轉(zhuǎn)多少度
速度控制:想讓電機(jī)轉(zhuǎn)多快它就轉(zhuǎn)多快
力矩控制:想讓電機(jī)出多少力它就出多少力
但無(wú)論是哪種控制目標(biāo),無(wú)非是一個(gè)閉環(huán)還是兩個(gè)閉環(huán)還是三個(gè)閉環(huán)的區(qū)別,力矩控制作為最內(nèi)層的環(huán),是必不可少的。今天就來(lái)講講什么是力矩控制?
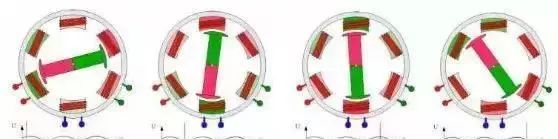
要控制一個(gè)電機(jī),首先對(duì)被控對(duì)象的了解是必須的。讓我們用下面這張動(dòng)圖來(lái)幫助理解永磁同步電機(jī)是怎樣運(yùn)動(dòng)起來(lái)的。定子三相上通過(guò)互差120度的交變電壓以后,在定子鐵芯上可以看到產(chǎn)生了旋轉(zhuǎn)的磁場(chǎng)(動(dòng)圖中代表磁場(chǎng)方向的紅綠顏色逆時(shí)針旋轉(zhuǎn)),在這個(gè)旋轉(zhuǎn)的磁場(chǎng)作用下,與轉(zhuǎn)子磁場(chǎng)產(chǎn)生力的作用,帶動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。
電機(jī)力矩是如何產(chǎn)生的呢?在前文《電機(jī)的力矩、轉(zhuǎn)速和功率》,我們分析過(guò)力矩與電樞(定子)電流成正比;
那么電流是如何產(chǎn)生的呢?我們可以把電機(jī)的每一個(gè)繞組想象成一個(gè)在磁場(chǎng)中旋轉(zhuǎn)的電阻+電感,如下面的等效電路:
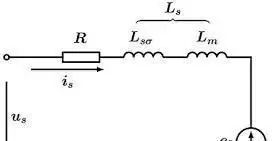
假設(shè)電機(jī)開(kāi)環(huán)運(yùn)行,當(dāng)給定電機(jī)定子三相一個(gè)互差120度的電壓建立起旋轉(zhuǎn)磁場(chǎng)以后,如果這個(gè)時(shí)候沒(méi)有負(fù)載,電機(jī)會(huì)飛速的轉(zhuǎn)動(dòng)起來(lái)(空載),直到反電勢(shì)和給定電壓完全相等;此時(shí)定子繞組中的電流為仍然為0,可以將定子的旋轉(zhuǎn)磁場(chǎng)假想(虛擬/等效)成一個(gè)繞著電機(jī)軸心旋轉(zhuǎn)的磁鐵,假想出來(lái)的這塊磁鐵的南極與轉(zhuǎn)子磁鐵的北極軸線(xiàn)相重合;
當(dāng)轉(zhuǎn)子上有了負(fù)載以后,根據(jù)牛頓運(yùn)動(dòng)定理,電機(jī)的轉(zhuǎn)速必然會(huì)有一個(gè)減速的過(guò)程,這就意味著上述等效電路中的反電勢(shì)降低,而在給定電壓不變的情況下,剩下的那些電壓就會(huì)在電阻中產(chǎn)生電流了。在那這一段減速的過(guò)程當(dāng)中還發(fā)生了什么事情呢?因?yàn)楸回?fù)載拖拽了一下,轉(zhuǎn)子磁鐵的軸心比虛擬出來(lái)的定子磁鐵軸心要之后一個(gè)角度了,這個(gè)角度就是我們所謂的“功角”。
關(guān)于電機(jī)的矢量模型,互聯(lián)網(wǎng)上可以找到各種各樣的圖,但這些圖要么太抽象,看了半天不知所云,沒(méi)法和實(shí)物對(duì)照起來(lái);要么不夠全面,一張圖里的內(nèi)容有限,對(duì)實(shí)際工作指導(dǎo)意義不大。
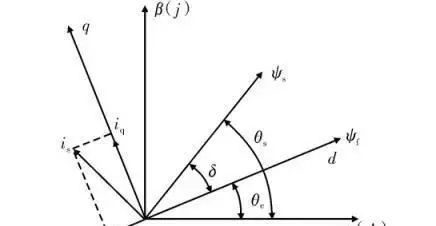
因此筆者在實(shí)際工作過(guò)程中,喜歡把大量相關(guān)的矢量都揉在一起,見(jiàn)下圖:
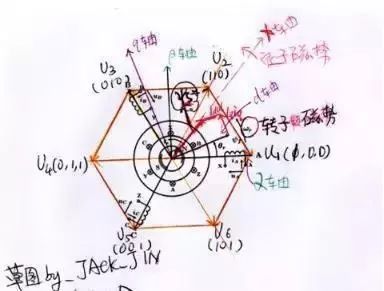
最中間的小圓是轉(zhuǎn)子(N極和S極),轉(zhuǎn)子外圍有排列互差120度的AX,BY,CZ三相定子。
靜止兩相坐標(biāo)軸:α與定子A相重合,β比α超前90度(圖中綠色坐標(biāo)軸)
旋轉(zhuǎn)兩相坐標(biāo)找:d軸與轉(zhuǎn)子的N極重合,q軸比d軸超前90度(圖中紫色坐標(biāo)軸)
X軸:定子旋轉(zhuǎn)磁動(dòng)勢(shì)ψs,可分解為轉(zhuǎn)子磁動(dòng)勢(shì)ψf,id*Lq和Iq*Ld(圖中紅色向量)
電壓矢量:三相全橋的開(kāi)關(guān)組合可以表示的電壓在空間的表現(xiàn)形式(黃色箭頭)
說(shuō)一千,道一萬(wàn),所謂的電機(jī)的力矩控制,就是通過(guò)一定的控制算法,去尋找一些開(kāi)關(guān)管的組合(圖中黃色部分)來(lái)合成一個(gè)給電機(jī)定子的給定電壓(圖中的大紅色箭頭),這個(gè)電壓抵消掉反電勢(shì)后產(chǎn)生的電流所對(duì)應(yīng)的力矩剛好與外部負(fù)載平衡。
二、FOC與DTC
電機(jī)的力矩控制當(dāng)前存在的兩個(gè)主要流派是磁場(chǎng)定向控制FOC和直接轉(zhuǎn)矩控制DTC,當(dāng)然這兩種控制的算法從原理上說(shuō)對(duì)所有的交流電機(jī)都適用,本文只是講講他們用于永磁同步電機(jī)控制的異同。
FOC
FOC控制理論最初于上世紀(jì)70年代由西門(mén)子的工程師提出。在上文中我們提到過(guò)可以把定子所產(chǎn)生的磁場(chǎng)虛擬成一個(gè)繞轉(zhuǎn)子高速旋轉(zhuǎn)磁鐵。
定子磁勢(shì)可分解為d軸磁勢(shì)和q軸磁勢(shì),d軸磁勢(shì)與轉(zhuǎn)子磁勢(shì)同軸,不能產(chǎn)生切向的力矩,但會(huì)影響永磁同步電機(jī)轉(zhuǎn)子永磁體所產(chǎn)生的磁場(chǎng);q軸與轉(zhuǎn)子磁勢(shì)相差90度,因而產(chǎn)生切向的力矩(類(lèi)似兩根垂直的條形磁鐵所產(chǎn)生的相互作用力)。
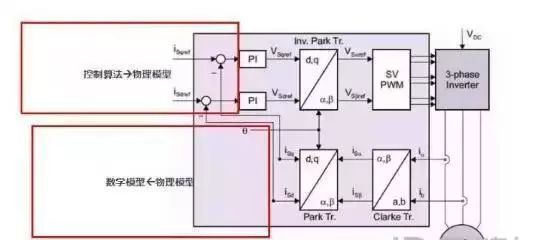
FOC的控制的基本思路就是將三相靜止ABC坐標(biāo)系下的相關(guān)變量轉(zhuǎn)換到旋轉(zhuǎn)坐標(biāo)系下(d,q)進(jìn)行數(shù)學(xué)運(yùn)算,controller改變d軸和q軸的電壓達(dá)到控制d軸和q軸電流的目的。然而最終給電機(jī)三相的只能是靜止坐標(biāo)系下的電壓,因此在控制算法中需要再次把dq軸的電壓轉(zhuǎn)換成ABC三相電壓給驅(qū)動(dòng)橋。即存在一個(gè)從物理模型à數(shù)學(xué)模型à控制算法à物理模型的過(guò)程。
要實(shí)現(xiàn)FOC,下列輸入必不可少:
1.電機(jī)三相電流(可采用如上圖所示的的兩個(gè)電流傳感器,也可以采用一個(gè)低邊或高邊的母線(xiàn)電流傳感器,用分時(shí)采樣電流重構(gòu)的方法還原出三相電流)
2.電機(jī)的位置信號(hào)缺一不可
下列控制模塊必不可少:
1.Clark-Park變換
2.d軸和q軸的PI調(diào)節(jié)
3.反Clark-Park變換
4.SPWM/SVPWM(當(dāng)然是用SVPWM)
下圖給出了具體的控制過(guò)程。
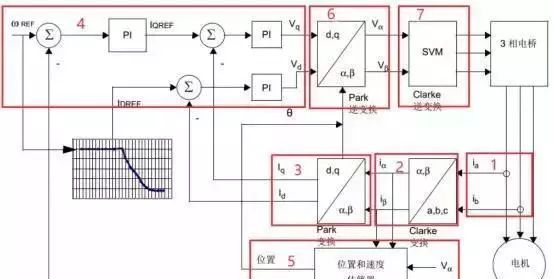
過(guò)程如下:
1、測(cè)量3相定子電流。這些測(cè)量可得到ia和ib的值,可以通過(guò)以下公式計(jì)算出ic:
ia+ib+ic=0
2、將3相電流變換至2軸系統(tǒng)。該變換將得到變量iα和iβ,它們是由測(cè)得的ia和ib以及計(jì)算出的ic值變換而來(lái)的。從定子角度來(lái)看,iα和iβ是相互正交的時(shí)變電流值。
3、按照控制環(huán)上一次迭代計(jì)算出的變換角,來(lái)旋轉(zhuǎn)2軸系統(tǒng)使之與轉(zhuǎn)子磁通對(duì)齊。iα和iβ變量經(jīng)過(guò)該變換可得到Id和Iq。Id和Iq為變換到旋轉(zhuǎn)坐標(biāo)系下的正交電流。在穩(wěn)態(tài)條件下,Id和Iq是常量。
4、誤差信號(hào)由Id、Iq的實(shí)際值和各自的參考值進(jìn)行比較而獲得。
· Id的參考值控制轉(zhuǎn)子磁通
· Iq的參考值控制電機(jī)的轉(zhuǎn)矩輸出
· 誤差信號(hào)是到PI控制器的輸入
· 控制器的輸出為Vd和Vq,即要施加到電機(jī)上的電壓矢量
5、估算出新的變換角,其中Vα、Vβ、iα和iβ是輸入?yún)?shù)。新的角度可告知FOC算法下一個(gè)電壓矢量在何處。
6、通過(guò)使用新的角度,可將PI控制器的Vd和Vq輸出值逆變到靜止參考坐標(biāo)系。該計(jì)算將產(chǎn)生下一個(gè)正交電壓值Vα和Vβ。
7、Vα和Vβ值經(jīng)過(guò)逆變換得到3相值Va、Vb和Vc。該3相電壓值可用來(lái)計(jì)算新的PWM占空比值,以生成所期望的電壓矢量。
DTC:
DTC的出現(xiàn)比FOC晚了十多年,是上世紀(jì)80年代中期由德國(guó)學(xué)者Depenbrock教授提出。其基本思路是不再將定子側(cè)的相關(guān)變量折算到轉(zhuǎn)子的旋轉(zhuǎn)坐標(biāo)系下,放棄了矢量控制中電流解耦的控制思想 ,去掉了PI調(diào)節(jié)模塊、反Clark-Park變換和SVPWM模塊 ,轉(zhuǎn)而通過(guò)檢測(cè)母線(xiàn)電壓和定子電流 ,直接計(jì)算出電機(jī)的磁鏈和轉(zhuǎn)矩 ,并利用兩個(gè)滯環(huán)比較器直接實(shí)現(xiàn)對(duì)定子磁鏈和轉(zhuǎn)矩的解耦控制。
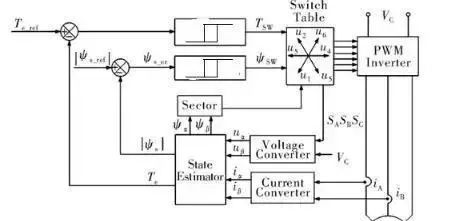
從上框圖我們可看到,控制算法首先根據(jù)電機(jī)的線(xiàn)電流和相電壓,得到在靜止兩相坐標(biāo)軸下的電壓和電流 Uα 、Uβ、 Iα、 Iβ。然后根據(jù)這四個(gè)量,對(duì)定子的磁通和力矩進(jìn)行估計(jì),怎么個(gè)估計(jì)法呢?可以用如下兩個(gè)公式(不需要電機(jī)角度信號(hào)):
同時(shí),還要根據(jù)電機(jī)定子的電壓和電流來(lái)估算當(dāng)前轉(zhuǎn)子的位置所在的區(qū)間。
當(dāng)然如果擔(dān)心軟件中積分運(yùn)算有累計(jì)誤差導(dǎo)致不準(zhǔn)確,或者轉(zhuǎn)子磁通的值不準(zhǔn)確,或者功率角的值不準(zhǔn)確,也可以在系統(tǒng)中加入角度傳感器,將相關(guān)參數(shù)都放到旋轉(zhuǎn)坐標(biāo)dq軸坐標(biāo)系下后去計(jì)算。
計(jì)算得到定子磁通和扭矩值以后,與其參考值做比較并經(jīng)過(guò)滯緩比較器以后,得到兩個(gè)非零即1的狀態(tài)量,表征當(dāng)前磁和力與參考值的關(guān)系其關(guān)系如下。

1.針對(duì)當(dāng)前的力矩和磁場(chǎng),不考慮到底磁場(chǎng)和力矩輸出與參考值相差多少,只考慮他們是“欠”還是“過(guò)”
2.在控制策略中,不考慮每一次運(yùn)行的時(shí)候都給一個(gè)準(zhǔn)確的電壓矢量,而是在每個(gè)運(yùn)行周期內(nèi)給出一個(gè)V1-V6其中之一(因此沒(méi)有占空比這個(gè)概念存在了)
接下來(lái)的問(wèn)題是怎樣選擇V1還是V6呢?還是先回到D-Q軸坐標(biāo)系的這張圖(雖然在控制中算法中不會(huì)用到),稍作思考即可想明白如果施加的電壓向量與d軸在正負(fù)90度之內(nèi)就會(huì)導(dǎo)致磁通增加;施加的電壓向量與q軸在正負(fù)90度之內(nèi)就會(huì)導(dǎo)致扭矩增加。
可以用下面極坐標(biāo)系的四個(gè)象限來(lái)表示其關(guān)系:
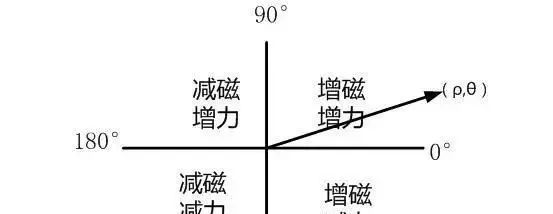
那么,我們就可以根據(jù)當(dāng)前轉(zhuǎn)子位置值,按以下開(kāi)關(guān)表給電機(jī)驅(qū)動(dòng)橋指令:
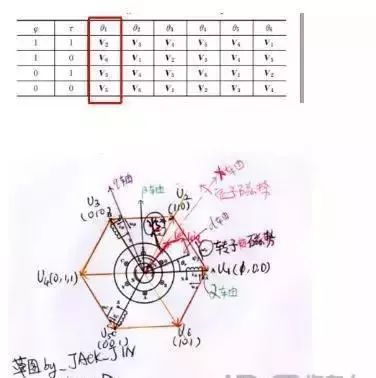
結(jié)合以上兩圖,以電機(jī)在第一扇區(qū)為例,
1.如果電機(jī)欠磁欠力(1 1),給定U2,則給定電壓與電機(jī)當(dāng)前位置的電壓夾角介于[0° 60°]之間,實(shí)現(xiàn)增磁增力;
2.如果電機(jī)欠磁過(guò)力(1 0),給定U6,則給定電壓與電機(jī)當(dāng)前位置的電壓夾角介于[-60° 0°]之間,實(shí)現(xiàn)增磁增力
3.如果電機(jī)過(guò)磁欠力(0 1),給定U3,則給定電壓與電機(jī)當(dāng)前位置夾角介于[60° 120°]之間,電機(jī)會(huì)增力,但磁的狀況不單調(diào),但是隨著多個(gè)循環(huán)的調(diào)整,磁最終也能與給定平衡(這個(gè)是沒(méi)有辦法的事情,6個(gè)電壓矢量把空間分成了6個(gè)區(qū)間;而增減關(guān)系是4個(gè)區(qū)間,必然有重疊)
4.如果電機(jī)過(guò)磁過(guò)力(0 0),給定U5,則給定電壓與電機(jī)當(dāng)前位置夾角介于[180° 240°]之間,電機(jī)減磁減力
其余區(qū)間類(lèi)推,最終形成的定子磁鏈如下圖所示:

綜上,可對(duì)兩種控制算法小結(jié)如下:

三、關(guān)于電機(jī)位置信號(hào)
電機(jī)位置信號(hào)的重要性
在永磁同步電機(jī)FOC控制算法中,需要用到一個(gè)非常重要的物理量是電機(jī)的位置信號(hào)。
這個(gè)位置信號(hào)到底有多重要呢?還是用數(shù)據(jù)來(lái)說(shuō)話(huà)吧。筆者搭建了一個(gè)電機(jī)的電流環(huán)仿真模型,固定電機(jī)轉(zhuǎn)速的情況下,給定電機(jī)3.2Nm的控制指令,
分三種工況進(jìn)行仿真:
工況1:轉(zhuǎn)子信號(hào)正常(下圖綠線(xiàn))
工況2:轉(zhuǎn)子信號(hào)上疊加30度的偏置(下圖藍(lán)線(xiàn))
工況3:轉(zhuǎn)子信號(hào)上疊加±7度的高斯隨機(jī)白噪聲(下圖紅線(xiàn))
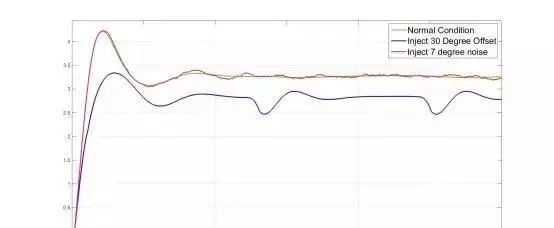
從仿真結(jié)果來(lái)看,工況2電機(jī)輸出力矩不足且存在與轉(zhuǎn)子位置相關(guān)的固有波動(dòng);工況3存在一定程度的扭矩紋波。由此,該信號(hào)的重要性可見(jiàn)一斑。
電機(jī)位置信號(hào)的種類(lèi)
目前在汽車(chē)領(lǐng)域的電機(jī)里用得比較多的電機(jī)位置信號(hào)傳感器有兩種類(lèi)型:
(1) 內(nèi)外磁環(huán)+Hall芯片
這種方案會(huì)在電機(jī)端部與轉(zhuǎn)子同軸處安裝一磁環(huán)板,板上充有內(nèi)磁環(huán)和外傳兩部分,同時(shí)在磁環(huán)附近安裝有一PCB,PCB上安裝有三個(gè)單線(xiàn)性hall芯片輸出Hall_A,B,C信號(hào)和一個(gè)雙線(xiàn)性Hall芯片輸出Hall_Q1,Q2信號(hào)。
內(nèi)磁環(huán)上分布與電機(jī)極對(duì)數(shù)相等均勻分布的N-S磁極,分別依次以120度相位差被三個(gè)單hall芯片感應(yīng)。因而,對(duì)這三片hall芯片在PCB版上的排列要求就是這三個(gè)芯片應(yīng)該在【0 360/極對(duì)數(shù)】范圍內(nèi)均勻分布。
外磁環(huán)上分布了若干N-S磁極(比較典型的數(shù)字是72,80),隨著轉(zhuǎn)子的轉(zhuǎn)動(dòng)N_S磁極每經(jīng)過(guò)雙Hall芯片下方一次,芯片感應(yīng)輸出一組正交90度變化的HallQ1_Q2信號(hào)。

比較典型的Hall信號(hào)與電機(jī)反電勢(shì)的關(guān)系見(jiàn)下圖:
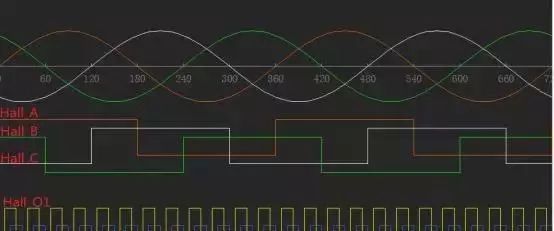
一般來(lái)說(shuō)用五路信號(hào)足以得到電機(jī)絕對(duì)位置,并且他們之間具備相互冗余校驗(yàn)的功能。但是在一些要求比較高的場(chǎng)合,可能會(huì)用到7路hall信號(hào)。
(2) 旋轉(zhuǎn)變壓器
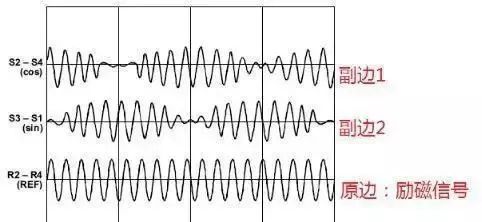
旋轉(zhuǎn)變壓器的定子繞組作為變壓器的原邊,接受勵(lì)磁電壓;轉(zhuǎn)子繞組作為變壓器的副邊,通過(guò)電磁耦合得到感應(yīng)電壓。其工作原理和普通變壓器基本相似,區(qū)別在于普通變壓器的原邊、副邊繞組是相對(duì)固定的,所以輸出電壓和輸入電壓之比是常數(shù),而旋轉(zhuǎn)變壓器的原邊、副邊繞組則隨轉(zhuǎn)子的角位移發(fā)生相對(duì)位置的改變,因而其輸出電壓的大小隨轉(zhuǎn)子角位移而發(fā)生變化。

其典型的信號(hào)特征如下:
除此之外,近些年來(lái)磁阻型的位置信號(hào)傳感風(fēng)頭正勁,大有搶班奪權(quán)之勢(shì)。
電機(jī)位置信號(hào)的應(yīng)用
Hall信號(hào)的一般經(jīng)過(guò)一個(gè)簡(jiǎn)單的整形電路以后直接接入單片機(jī)的比較捕捉單元就可以被單片機(jī)進(jìn)行解碼,某些單片機(jī)甚至有專(zhuān)門(mén)的Hall信號(hào)正交編碼單元由硬件實(shí)現(xiàn)對(duì)HallQ信號(hào)的解碼;而旋變信號(hào)則需要專(zhuān)用的解碼芯片(該專(zhuān)用解碼芯片一般來(lái)說(shuō)是指RDC resolver芯片,現(xiàn)在做的最好的就是美國(guó)的ADI和日本多摩川兩家,但也不絕對(duì),比如某日本廠商采用的就是一片運(yùn)算單元功能強(qiáng)大但外設(shè)很少的MCU)。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2564文章
52619瀏覽量
763910 -
芯片
+關(guān)注
關(guān)注
459文章
52205瀏覽量
436465 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9258瀏覽量
148421
原文標(biāo)題:永磁同步電機(jī)的FOC/ DTC,你能弄明白嗎?
文章出處:【微信號(hào):motorcontrol365,微信公眾號(hào):電機(jī)控制設(shè)計(jì)加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
利用擴(kuò)張狀態(tài)觀測(cè)器的交流永磁同步電機(jī)控制
改進(jìn)粒子群算法的永磁同步電機(jī)PID控制器
工程師經(jīng)驗(yàn)分享:社區(qū)之星 趙云 沉著穩(wěn)定才能做好技術(shù)

永磁同步電機(jī)與伺服電機(jī)的對(duì)比
如何實(shí)現(xiàn)永磁同步電機(jī)的智能控制
永磁同步電機(jī)應(yīng)用領(lǐng)域 永磁同步電機(jī)的優(yōu)缺點(diǎn)
永磁同步電機(jī)的工作原理 永磁同步電機(jī)與異步電機(jī)的區(qū)別
新能源叉車(chē)電機(jī)控制解決方案:芯海科技CS32F103高性能MCU的應(yīng)用與優(yōu)勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論