") 機(jī)器學(xué)習(xí)功能安全的算法選擇標(biāo)準(zhǔn)
機(jī)器學(xué)習(xí)功能安全的算法選擇標(biāo)準(zhǔn)

在 這三部分系列的第一部分中,作者調(diào)查了機(jī)器學(xué)習(xí)技術(shù)在高度自動(dòng)化駕駛場(chǎng)景中的驅(qū)動(dòng)因素和潛在應(yīng)用。第二部分定義了機(jī)器學(xué)習(xí)技術(shù)的理論背景,以及汽車(chē)開(kāi)發(fā)人員可用的神經(jīng)網(wǎng)絡(luò)類(lèi)型。第三部分在功能安全要求的背景下評(píng)估這些選項(xiàng)。
深度學(xué)習(xí)徹底改變了機(jī)器學(xué)習(xí)系統(tǒng)及其能力,但它不一定是最適合所有任務(wù)的方法。對(duì)于其他幾種類(lèi)型的應(yīng)用,使用傳統(tǒng)的模式識(shí)別方法(例如邏輯回歸、樸素貝葉斯或 k 均值聚類(lèi))可能更合適。因此,選擇正確的機(jī)器學(xué)習(xí)算法的標(biāo)準(zhǔn)是必要的。這些標(biāo)準(zhǔn)如下所述。
問(wèn)題的 復(fù)雜性 是控制選擇的直接標(biāo)準(zhǔn),它必須適合方法的復(fù)雜性。該標(biāo)準(zhǔn)可以轉(zhuǎn)化為算法必須學(xué)習(xí)的參數(shù)數(shù)量。例如,邏輯回歸算法為h_θ (x)圖 8 中的映射函數(shù)學(xué)習(xí)了兩個(gè)參數(shù)。深度神經(jīng)網(wǎng)絡(luò)可能需要學(xué)習(xí)數(shù)百萬(wàn)個(gè)參數(shù)才能獲得與邏輯回歸方法相似的結(jié)果。第 11 頁(yè)的圖 12 顯示了機(jī)器學(xué)習(xí)算法根據(jù)其復(fù)雜性排序的近似分布。
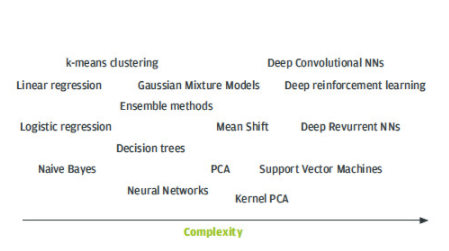
圖 12: 基于復(fù)雜性的機(jī)器學(xué)習(xí)算法分類(lèi)。
每個(gè)算法背后的數(shù)學(xué)是這一經(jīng)驗(yàn)發(fā)現(xiàn)的基礎(chǔ)。偏差-方差權(quán)衡是選擇和構(gòu)建機(jī)器學(xué)習(xí)系統(tǒng)時(shí)的一個(gè)重要方面。偏差是由學(xué)習(xí)方法做出的錯(cuò)誤假設(shè)所產(chǎn)生的誤差。它與欠擬合問(wèn)題直接相關(guān)。高偏差算法無(wú)法找到輸入特征和目標(biāo)標(biāo)簽之間的相關(guān)關(guān)系。相反,方差是該方法對(duì)輸入數(shù)據(jù)中存在的隨機(jī)噪聲的敏感性的度量。高方差系統(tǒng)可能導(dǎo)致過(guò)度擬合,其中算法模擬隨機(jī)噪聲而不是實(shí)際輸入特征。在實(shí)踐中,必須在偏差和方差之間進(jìn)行權(quán)衡,因?yàn)檫@兩個(gè)量彼此成比例。另一個(gè)應(yīng)該考慮的標(biāo)準(zhǔn)是調(diào)整參數(shù)的數(shù)量數(shù)據(jù)工程師在訓(xùn)練分類(lèi)器時(shí)需要調(diào)整。
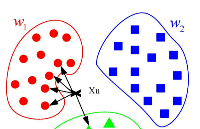
最后,還需要考慮輸入數(shù)據(jù)的性質(zhì)。特征空間中數(shù)據(jù)的線性分離在現(xiàn)實(shí)世界中是不尋常的。但可以說(shuō),對(duì)于某些應(yīng)用,可以假設(shè)線性。這方面的一個(gè)例子是在第 3 節(jié)開(kāi)頭描述的基于大小和速度的汽車(chē)和非汽車(chē)對(duì)象的分類(lèi)。這個(gè)假設(shè)對(duì)于選擇合適的機(jī)器學(xué)習(xí)方法至關(guān)重要,因?yàn)榫€性分類(lèi)器更快、更有效與非線性分類(lèi)器相比,可以線性分離的數(shù)據(jù)。
功能安全注意事項(xiàng)
功能安全是系統(tǒng)整體安全的一部分。ISO 26262“道路車(chē)輛 - 功能安全”描述了道路車(chē)輛電氣和電子 (E/E) 系統(tǒng)的開(kāi)發(fā)。通過(guò)各種活動(dòng)或技術(shù)解決方案使系統(tǒng)變得安全。這些所謂的安全措施反映在指定要求、創(chuàng)建架構(gòu)和設(shè)計(jì)以及執(zhí)行驗(yàn)證和確認(rèn)的過(guò)程活動(dòng)中。
避免系統(tǒng)故障是 ISO 26262 的一個(gè)方面。人為故障一直是傳統(tǒng)工程系統(tǒng)中的系統(tǒng)故障。此類(lèi)失敗的一些明顯示例包括:不完整的需求和測(cè)試用例、被遺忘的設(shè)計(jì)的重要方面或未能發(fā)現(xiàn)問(wèn)題的驗(yàn)證。使用機(jī)器學(xué)習(xí)時(shí)也是如此。此外,要學(xué)習(xí)的任務(wù)和相應(yīng)的測(cè)試用例也都是由人類(lèi)描述的。這里仍然可能發(fā)生系統(tǒng)性故障。因此,機(jī)器學(xué)習(xí)模型的開(kāi)發(fā)需要應(yīng)用最佳實(shí)踐或適當(dāng)?shù)臉?biāo)準(zhǔn)流程。僅此是不夠的。為了控制機(jī)器學(xué)習(xí)算法中的系統(tǒng)故障,需要采取安全措施,鑒于未來(lái)系統(tǒng)元素的部分開(kāi)發(fā)將通過(guò)此類(lèi)算法完成。只有在兩者都得到保證的情況下,才能消除這些故障。
由于機(jī)器學(xué)習(xí)在自動(dòng)駕駛系統(tǒng)中的使用越來(lái)越多,最近人們更加關(guān)注機(jī)器學(xué)習(xí)的安全性。Amodei 等人,2016 年,討論了與事故風(fēng)險(xiǎn)相關(guān)的研究問(wèn)題以及解決這些問(wèn)題的可能方法。傳統(tǒng)軟件系統(tǒng)中的代碼必須滿(mǎn)足特定要求,然后通過(guò)標(biāo)準(zhǔn)化測(cè)試進(jìn)行檢查。在機(jī)器學(xué)習(xí)中,計(jì)算機(jī)可以被認(rèn)為是通過(guò)學(xué)習(xí)方法來(lái)接管對(duì)模塊進(jìn)行“編程”的任務(wù)。這種“編程”表示在考慮第 3 節(jié)中介紹的技術(shù)背景時(shí)學(xué)習(xí)算法的參數(shù)或權(quán)重。學(xué)習(xí)過(guò)程通常是隨機(jī)的,這意味著無(wú)法定義硬性要求。因此,機(jī)器學(xué)習(xí)組件是一個(gè)黑盒系統(tǒng)。因此,
環(huán)境傳感器及其相關(guān)處理所起的決定性作用超出了功能安全的要求,尤其是在高度自動(dòng)駕駛的情況下。預(yù)期功能的安全性 (SOTIF) 與用于確保預(yù)期功能的安全關(guān)鍵方面正確執(zhí)行的方法和措施有關(guān),同時(shí)考慮到傳感器和處理算法。然而,對(duì)于傳統(tǒng)工程系統(tǒng)和機(jī)器學(xué)習(xí)系統(tǒng),這個(gè)問(wèn)題必須得到澄清,它仍然是正在進(jìn)行的討論的主題。
虛擬模擬器內(nèi)的分析是公開(kāi)此類(lèi)算法的一種方法。我們將這種方法用于第 2.2 節(jié)中介紹的自學(xué)習(xí)系統(tǒng)的實(shí)驗(yàn)。在將機(jī)器學(xué)習(xí)系統(tǒng)部署到現(xiàn)實(shí)世界的汽車(chē)之前,理論上可以在這樣的模擬環(huán)境中學(xué)習(xí)和評(píng)估無(wú)限數(shù)量的駕駛情況。
現(xiàn)在機(jī)器學(xué)習(xí)已經(jīng)從游戲和模擬發(fā)展到現(xiàn)實(shí)世界的汽車(chē)應(yīng)用程序,生命危在旦夕。如前所述,功能安全問(wèn)題因此變得越來(lái)越重要,這也影響到科學(xué)界。結(jié)果之一是研究在模擬中對(duì)不同機(jī)器學(xué)習(xí)和人工智能算法進(jìn)行基準(zhǔn)測(cè)試的方法。OpenAI Gym (Brockman et al. 2016) 就是這樣一個(gè)模擬器,它是一個(gè)用于開(kāi)發(fā)和比較強(qiáng)化學(xué)習(xí)算法的工具包。
結(jié)論與展望
最近的成就推動(dòng)了基于機(jī)器學(xué)習(xí)的功能在高度自動(dòng)駕駛中的應(yīng)用。最初的原型確實(shí)產(chǎn)生了有希望的結(jié)果,并在解決相關(guān)的復(fù)雜問(wèn)題時(shí)顯示了優(yōu)勢(shì)。然而,盡管機(jī)器學(xué)習(xí)可能是合適的,但仍然存在大量挑戰(zhàn)。首先有必要為給定任務(wù)選擇正確的神經(jīng)網(wǎng)絡(luò)類(lèi)型。這種選擇與應(yīng)用的學(xué)習(xí)方法、必要的預(yù)處理和訓(xùn)練數(shù)據(jù)的數(shù)量有關(guān)。關(guān)于將整體駕駛?cè)蝿?wù)分解為更小的子任務(wù)的最佳方法仍然存在討論。深度學(xué)習(xí)技術(shù)能夠?qū)崿F(xiàn)端到端的方法,而無(wú)需任何分解,但目前認(rèn)為這在驗(yàn)證和確認(rèn)能力方面不太合適。機(jī)器學(xué)習(xí)社區(qū)需要開(kāi)發(fā)增強(qiáng)的方法,尤其是為了滿(mǎn)足功能安全要求,這是相關(guān)功能成功工業(yè)化的基礎(chǔ)。
Elektrobit 堅(jiān)信機(jī)器學(xué)習(xí)具有重塑未來(lái)汽車(chē)軟件和系統(tǒng)格局的潛力,盡管挑戰(zhàn)依然存在。為此,已經(jīng)開(kāi)始了兩個(gè)方面的調(diào)查。第一個(gè)是應(yīng)用基于機(jī)器學(xué)習(xí)的方法作為高度自動(dòng)化駕駛場(chǎng)景(選定子集)的解決方案,例如上述用例。EB robinos 參考架構(gòu)以及與 NVIDIA 的合作伙伴關(guān)系等都有助于開(kāi)發(fā)環(huán)境。其次,Elektrobit 利用其在功能安全和汽車(chē)軟件工業(yè)化領(lǐng)域的專(zhuān)業(yè)知識(shí),將其合作伙伴和客戶(hù)的這些想法和產(chǎn)品變?yōu)楝F(xiàn)實(shí)。
審核編輯:郭婷
-
NVIDIA
+關(guān)注
關(guān)注
14文章
5275瀏覽量
105995 -
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8499瀏覽量
134283 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14257瀏覽量
170074
發(fā)布評(píng)論請(qǐng)先 登錄
十大鮮為人知卻功能強(qiáng)大的機(jī)器學(xué)習(xí)模型

請(qǐng)問(wèn)STM32部署機(jī)器學(xué)習(xí)算法硬件至少要使用哪個(gè)系列的芯片?
機(jī)器學(xué)習(xí)模型市場(chǎng)前景如何
華為云 Flexus X 實(shí)例部署安裝 Jupyter Notebook,學(xué)習(xí) AI,機(jī)器學(xué)習(xí)算法
傳統(tǒng)機(jī)器學(xué)習(xí)方法和應(yīng)用指導(dǎo)
如何選擇云原生機(jī)器學(xué)習(xí)平臺(tái)
加密算法的選擇對(duì)于加密安全有多重要?
NPU與機(jī)器學(xué)習(xí)算法的關(guān)系
【每天學(xué)點(diǎn)AI】KNN算法:簡(jiǎn)單有效的機(jī)器學(xué)習(xí)分類(lèi)器
人工智能、機(jī)器學(xué)習(xí)和深度學(xué)習(xí)存在什么區(qū)別

什么是汽車(chē)ISO 26262功能安全標(biāo)準(zhǔn)?
功能安全標(biāo)準(zhǔn)在汽車(chē)芯片領(lǐng)域的應(yīng)用
ISO26262 汽車(chē)功能安全標(biāo)準(zhǔn)第二版
機(jī)器學(xué)習(xí)算法原理詳解
機(jī)器學(xué)習(xí)的經(jīng)典算法與應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論