") 準備好跳上自動駕駛汽車了嗎
準備好跳上自動駕駛汽車了嗎
安全是自動駕駛汽車的主要關注點。在不斷運動中,他們對車輛環(huán)境的感知是工程師面臨的最具挑戰(zhàn)性的任務之一。
要了解所涉及的整個過程,讓我們回顧一下決策通道(圖 1)。這一切都始于各種傳感器,這些傳感器提供有關車輛周圍環(huán)境以及車輛本身的信息。然后評估這些信息——障礙物檢測、車道檢測、位置、周圍物體動態(tài)分析(例如前方汽車的速度),以及交通標志和路徑優(yōu)化。此信息有助于決定如何驅動車輛,并精確控制其位置和動態(tài)。
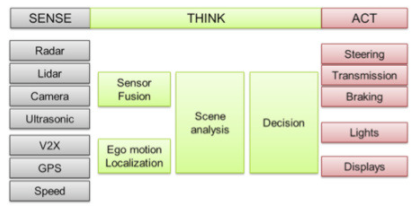
【圖1 | 汽車中決策結構的功能劃分。]
這個簡化的過程意味著自動駕駛汽車面臨的幾個主要挑戰(zhàn)。首先,該結構假設傳感器信息在不同的關鍵功能之間共享,以生成統(tǒng)一且獨特的車輛狀態(tài)模型。換句話說,這假定了集中式計算架構,這是一種與今天的汽車完全不同的方法,其中功能聚集到隔離的計算單元中。其次,這種劃分需要大量的計算能力。問題就在這里:這種集中的計算能力在為典型駕駛員提供自動駕駛功能的汽車中仍然不可用。
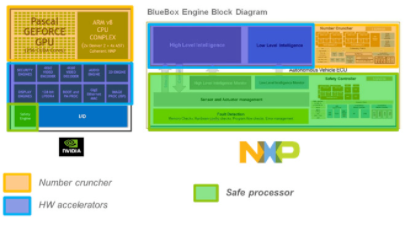
【圖2 | ADAS 計算架構示例。]
如今,有幾種潛在的計算架構,例如 NVIDIA PX Drive 2 和 NXP BlueBox(圖 2)。這些平臺包含一個稱為“數(shù)字處理器”的并行計算部分,專門用于處理從傳感器接收到的大量數(shù)據(jù)(橙色,圖 2)。此外,硬件加速器提高了某些特定功能的性能。
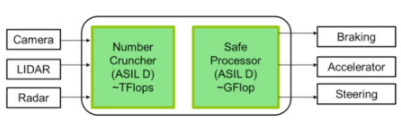
最后但并非最不重要的,也許是最關鍵的部分之一,“安全”處理器確保應用于汽車執(zhí)行器的決定是在響應最高汽車認證級別(例如 ISO26262 ASIL-D)的單元中做出的。將圖 1 的分區(qū)映射到這些架構中會導致類似于圖 3 中所示的方案。使用傳感器輸入完成的密集數(shù)據(jù)處理由提供數(shù)個 TFlops 計算能力的數(shù)字處理器功能確保。該決定由具有某些 GFlops 計算能力的安全處理器應用。
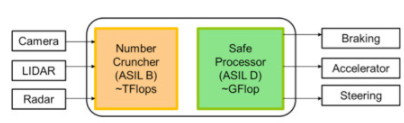
【圖3】
因此,命令由功能較弱的處理器發(fā)出,但具有強大的功能安全保證。問題是決策鏈的一部分具有較低級別的功能安全性。那么,如何評估整個系統(tǒng)呢?第一個解決方案可以是冗余(圖 4)。然而,復雜性[2] 和成本影響很重要。
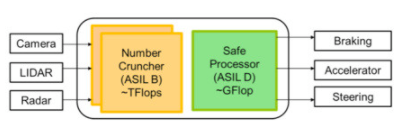
[圖4]
另一種方法是提出故障解決方案,以保證數(shù)字運算部分的功能安全(圖 5)。今天,一些技術和理論問題阻止了該解決方案在不久的將來可用。
【圖5】
應考慮在算法級別工作,以減少相同功能的計算能力。如果我們可以將每個函數(shù)的復雜性降低 10、100 或 1,000 倍會怎樣?這應該有助于將關鍵功能安裝到已認證的處理器中,并讓數(shù)字處理器確保互補功能。SIGMA FUSION 提出了一種有助于朝這個方向發(fā)展的算法。它解決了確保環(huán)境感知所需的距離傳感器融合問題。它適合單個處理器,提供幾 GFlops 的計算能力,相當于當今的汽車認證處理器。
審核編輯:郭婷
-
處理器
+關注
關注
68文章
19820瀏覽量
233689 -
adas
+關注
關注
310文章
2241瀏覽量
209911 -
自動駕駛
+關注
關注
788文章
14223瀏覽量
169664
發(fā)布評論請先 登錄
Vicor高效電源模塊優(yōu)化自動駕駛系統(tǒng)

NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
理想汽車推出全新自動駕駛架構
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

線控底盤如何讓自動駕駛加速奔跑?
MEMS技術在自動駕駛汽車中的應用
自動駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論