 提升工業通信能力,機器人驅動選型從側面突破
提升工業通信能力,機器人驅動選型從側面突破
上一期說到,隨著國內工業機器人賽道上玩家的增多,機器人廠商,尤其是國內協作機器人廠商都開始尋求最適合自己的主控芯片。性能的高低已經不是單一的決定因素,這些廠商往往要考慮到拓展機器人功能以及把控整機成本。所以很多以前在芯片選型上保守的廠商現在都愿意嘗試一下不同的芯片,擇優選出最適合自家的型號。上一期物品們列出的僅僅是機器人關節驅動芯片里的三個為人熟知的系列,在這個應用領域里,還有這大量優秀的產品值得挖掘。
RX72M
單芯片依然是國內做工業機器人關節驅動最常見的方案。RA的RX72M加上EtherCAT的單芯片解決方案也是不少國內機器人廠商常用的選擇。這種設計方案考慮到總線通信功能,減去了設計者需要自己外加從站控制芯片的步驟,將從控制器集成到了MCU上,實現了需要在單個芯片上使用專用控制器的系統配置,從而有助于減少零件數量并節省空間。因此這種方案很受機器人廠商歡迎。

RX72M產品組內核是RA出名的RX第三代CPU內核“RXv3 core”。性能很高,主頻最高可達240MHz,這個系列能夠在240 MHz下運行1396 CoreMark,再加上片上雙精度FPU,顯著提高了MCU處理能力。RA為這個擁有強大核心能力的系列配置了大容量4MB存儲和SRAM 1 MB 的閃存記憶體。
這個通信接口尤為豐富,包括符合IEEE 1588的以太網MAC、SD主機接口、四SPI和CAN,對于通訊協議復雜的機器人工控應用來說這樣的設計可以減少很多麻煩。從整個體系上這個系列也很注重對功耗的限制,RTC能夠通過專用電源進行操作,并配有四種不同模式的低功耗模式。
如果RX72M僅僅在內核處理性能上做了增強,那么對機器人廠商而言可能都不會有那么多吸引力。就單單它支持市場上70%以上主要工業網絡通信協議就能看出RX72M在基礎設施上的建設花了不少心思。除此之外RA還有結合ROS的機器人驅動組合,也是極具吸引力。
AM64X
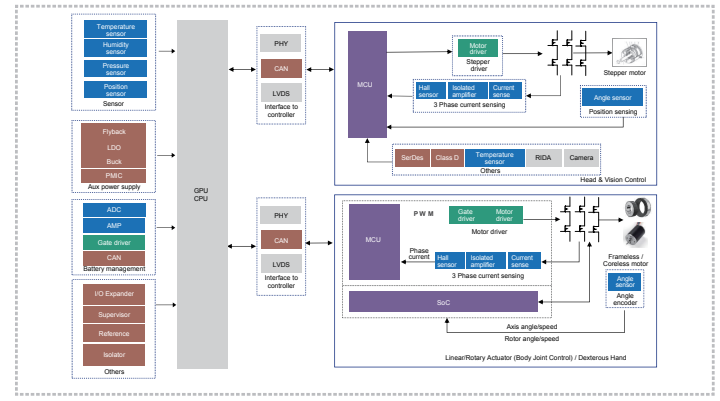
TI有不少用于工業機器人協作機器人的單芯片方案,旗下C2000系列,DSP系列一直是行業里的主流硬通貨。但這次我們不看這些耳熟能詳的系列,我們看看AM64X系列中的新品。雖然AM6442還沒有正式發售,還沒有經過各家機器人廠商的校驗。但僅從它的配置上,就已經能斷言在高端協作機器人驅動上它一定能穩占一席。
 ?(圖源:TI)
?(圖源:TI)
AM6442是Sitara新增的工業級異構Arm處理器產品系列,針對需要將實時通信與應用處理結合的電機驅動器而構建。AM6442將兩個支持時間敏感TSN技術的Sitara千兆位PRU-ICSSG與最多兩個Arm Cortex-A53內核、最多四個Cortex-R5F MCU和一個Cortex-M4F MCU合并到一起。看到這里想必都明白這個處理器系列性能有多強悍了。即便是對于工業機器人的多軸控制,這個系列的性能應付起來也是綽綽有余。
雙核64位Arm Cortex-A53微處理器系統性能高達 1.0GHz,子系統則支持最多2個雙核Arm Cortex-R5F MCU 子系統主頻最高800MHz專用于實時處理。而另一個單核Arm Cortex-M4F MCU最高400MHz。如此高性能的內核,配合緊密耦合的存儲器組以及可配置的SRAM分區,對于實時性能要求越來越高的機器人應用正好適配。
為了應對復雜的工業通信,AM6442配置了兩個千兆位工業通信子系統。子系統不僅僅支持TI非常有特色的時間敏感網絡,還支持Profinet IRT、Profinet RT、EtherNet/IP、EtherCAT等等。對工業網絡通信協議絲毫不比上面那位差。唯一的缺點可能就是對大多數走量的機器人廠商來說這樣的配置太高端。
XMC4000
英飛凌的XMC4000系列采用了內置DSP指令的 Arm Cortex-M4內核。各型號在主頻,應用方向上稍有不同,但單精度浮點單元、DMA以及MPU這些先進的技術一個都不少。
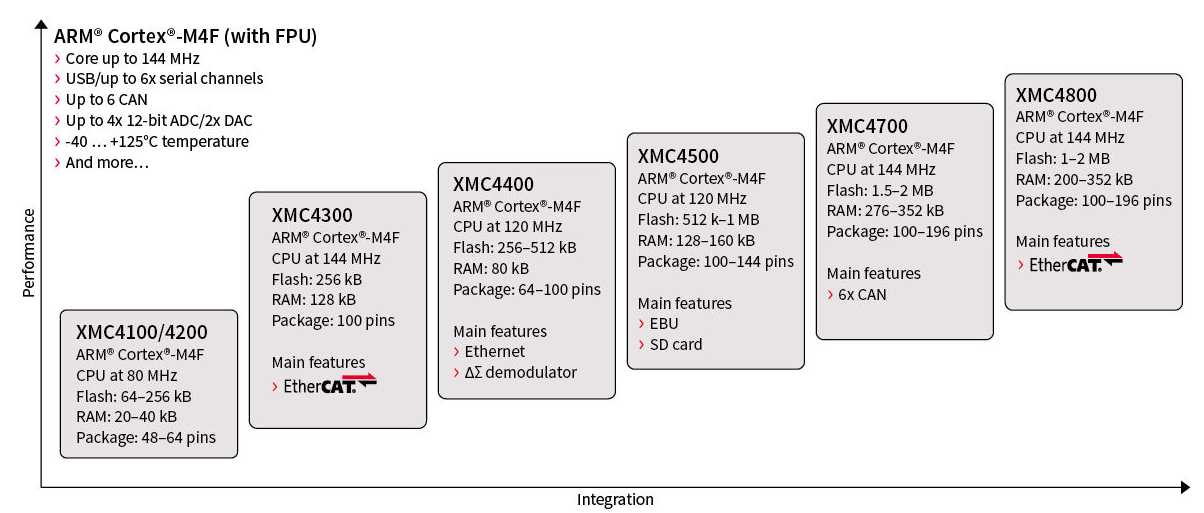
集成EtherCAT的4300與4800是很多機器人廠商鐘愛的選擇。本身強大的內核性能,加上增強型的通信能力以及相比之下更低的成本,這個系列能成為一些機器人廠商的偏愛不無道理。
就本身性能來看,144MHz的主頻加上FPU、DSP,配合2MB的嵌入式閃存和352KB的嵌入式RAM,已經可以讓工業機器人關節驅動表現良好的性能。此外還配置了一套全面的定時器、Delta Sigma 解調器、位置接口、具有ADC觸發器的PWM。
XMC4800在嵌入式控制上是性價比很高的一個系列。XMC4800系列是業界首款將EtherCAT與ARM Cortex-M 控制器結合的MCU,具有集成閃存和模擬/混合信號IP。在EtherCAT設計上,英飛凌一直都以緊湊、成本效益為先,無需專用 ASIC和外部存儲器。在成本的把控上無疑是切中了廠商的痛點。
小結
集成工業以太通訊協議的芯片受到一大批機器人廠商的青睞。在性能足夠覆蓋機器人驅動的情況下,提供更好的其他層面的支持也提升了下游廠商的黏性。
RX72M
單芯片依然是國內做工業機器人關節驅動最常見的方案。RA的RX72M加上EtherCAT的單芯片解決方案也是不少國內機器人廠商常用的選擇。這種設計方案考慮到總線通信功能,減去了設計者需要自己外加從站控制芯片的步驟,將從控制器集成到了MCU上,實現了需要在單個芯片上使用專用控制器的系統配置,從而有助于減少零件數量并節省空間。因此這種方案很受機器人廠商歡迎。
(圖源:RA)
RX72M產品組內核是RA出名的RX第三代CPU內核“RXv3 core”。性能很高,主頻最高可達240MHz,這個系列能夠在240 MHz下運行1396 CoreMark,再加上片上雙精度FPU,顯著提高了MCU處理能力。RA為這個擁有強大核心能力的系列配置了大容量4MB存儲和SRAM 1 MB 的閃存記憶體。
這個通信接口尤為豐富,包括符合IEEE 1588的以太網MAC、SD主機接口、四SPI和CAN,對于通訊協議復雜的機器人工控應用來說這樣的設計可以減少很多麻煩。從整個體系上這個系列也很注重對功耗的限制,RTC能夠通過專用電源進行操作,并配有四種不同模式的低功耗模式。
如果RX72M僅僅在內核處理性能上做了增強,那么對機器人廠商而言可能都不會有那么多吸引力。就單單它支持市場上70%以上主要工業網絡通信協議就能看出RX72M在基礎設施上的建設花了不少心思。除此之外RA還有結合ROS的機器人驅動組合,也是極具吸引力。
AM64X
TI有不少用于工業機器人協作機器人的單芯片方案,旗下C2000系列,DSP系列一直是行業里的主流硬通貨。但這次我們不看這些耳熟能詳的系列,我們看看AM64X系列中的新品。雖然AM6442還沒有正式發售,還沒有經過各家機器人廠商的校驗。但僅從它的配置上,就已經能斷言在高端協作機器人驅動上它一定能穩占一席。
?(圖源:TI)AM6442是Sitara新增的工業級異構Arm處理器產品系列,針對需要將實時通信與應用處理結合的電機驅動器而構建。AM6442將兩個支持時間敏感TSN技術的Sitara千兆位PRU-ICSSG與最多兩個Arm Cortex-A53內核、最多四個Cortex-R5F MCU和一個Cortex-M4F MCU合并到一起。看到這里想必都明白這個處理器系列性能有多強悍了。即便是對于工業機器人的多軸控制,這個系列的性能應付起來也是綽綽有余。
雙核64位Arm Cortex-A53微處理器系統性能高達 1.0GHz,子系統則支持最多2個雙核Arm Cortex-R5F MCU 子系統主頻最高800MHz專用于實時處理。而另一個單核Arm Cortex-M4F MCU最高400MHz。如此高性能的內核,配合緊密耦合的存儲器組以及可配置的SRAM分區,對于實時性能要求越來越高的機器人應用正好適配。
為了應對復雜的工業通信,AM6442配置了兩個千兆位工業通信子系統。子系統不僅僅支持TI非常有特色的時間敏感網絡,還支持Profinet IRT、Profinet RT、EtherNet/IP、EtherCAT等等。對工業網絡通信協議絲毫不比上面那位差。唯一的缺點可能就是對大多數走量的機器人廠商來說這樣的配置太高端。
XMC4000
英飛凌的XMC4000系列采用了內置DSP指令的 Arm Cortex-M4內核。各型號在主頻,應用方向上稍有不同,但單精度浮點單元、DMA以及MPU這些先進的技術一個都不少。
(圖源:英飛凌)
集成EtherCAT的4300與4800是很多機器人廠商鐘愛的選擇。本身強大的內核性能,加上增強型的通信能力以及相比之下更低的成本,這個系列能成為一些機器人廠商的偏愛不無道理。
就本身性能來看,144MHz的主頻加上FPU、DSP,配合2MB的嵌入式閃存和352KB的嵌入式RAM,已經可以讓工業機器人關節驅動表現良好的性能。此外還配置了一套全面的定時器、Delta Sigma 解調器、位置接口、具有ADC觸發器的PWM。
XMC4800在嵌入式控制上是性價比很高的一個系列。XMC4800系列是業界首款將EtherCAT與ARM Cortex-M 控制器結合的MCU,具有集成閃存和模擬/混合信號IP。在EtherCAT設計上,英飛凌一直都以緊湊、成本效益為先,無需專用 ASIC和外部存儲器。在成本的把控上無疑是切中了廠商的痛點。
小結
集成工業以太通訊協議的芯片受到一大批機器人廠商的青睞。在性能足夠覆蓋機器人驅動的情況下,提供更好的其他層面的支持也提升了下游廠商的黏性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
mcu
+關注
關注
146文章
17851瀏覽量
360697 -
驅動控制
+關注
關注
0文章
141瀏覽量
15999
發布評論請先 登錄
相關推薦
熱點推薦
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
”才到機器人控制器,焊接精度從±0.1mm“漂移”到±0.3mm。直到一次技術改造,讓不同協議的設備實現了“無障礙對話”,這場工業互聯的破局戰,藏著哪些硬核邏輯?
一、協議壁壘下的生產痛點
某合資車企
發表于 06-04 14:31
工業機器人與協作機器人概念不同
在自動化生產的浪潮中,工業機器人與協作機器人逐漸成為企業提升效率、優化產能的得力助手。但它們并非同一概念,在功能、設計與應用場景上有著顯著差異。北京沃華慧通測控有限公司憑借深厚的技術沉

具身智能工業機器人:引爆制造業‘自進化’革命
具身智能工業機器人:引爆制造業‘自進化’革命 在工業4.0浪潮席卷全球的今天,制造業正經歷從“自動化”到“智能化”的質變。作為這場變革的核心驅動

解碼“什么是具身智能工業機器人”
在工業4.0與人工智能深度融合的浪潮中,“什么是具身智能工業機器人”成為制造業智能化轉型的核心議題。作為具備自主感知、決策與執行能力的下一代工業
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
與未來,涵蓋如基于行為的人工智能、生物啟發的進化人工智能及認知機器人技術的發展。這一歷史背景為隨后的大模型驅動的具身智能討論奠定了基礎,隨著人工智能模型復雜性和能力的不斷提升,這一主題
發表于 12-28 21:12
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
將自然語言理解與運動規劃融為一體。這種端到端的方法使機器人能夠直接從人類指令生成動作序列,大幅簡化了控制流程。該項目的工作流程包含設計并封裝一個人機器人函數庫、編寫清晰地描述提示詞、在仿真環境中執行
發表于 12-24 15:03
從市場角度對機器人的基本解讀
自人工智能機器人發展至今,幾乎都是從學術方面對機器人進行定義詮釋。現今機器人市場化發展程度已逐步進入多領域不同場景的融合應用,對實際市場已經可以發揮一定的使用價值。為更快的增強

工業機器人常用的編程方式
工業機器人的編程是確保機器人能夠執行特定任務的關鍵步驟。編程方式多種多樣,每種方式都有其特定的應用場景和優勢。 工業機器人編程概述
Al大模型機器人
理解能力強大: AI大模型機器人可以理解和生成自然語言,能夠進行復雜的對話和語言任務。它們能夠識別語言中的語義、語境和情感,并據此作出適當的回應。廣泛的知識儲備: 這些模型基于大規模的數據集進行訓練,擁有
發表于 07-05 08:52
abb工業機器人的編程語言是什么
ABB工業機器人的編程語言主要是RAPID(Robot Application Programming Interface for Development),它是一種高級編程語言,專門為工業機
工業機器人控制系統的基本組成有哪些
機器人關節的角度位置。 速度傳感器 :測量機器人關節的旋轉速度。 力/力矩傳感器 :檢測機器人末端執行器與環境的交互力。 視覺傳感器 :提供機器人對環境的視覺感知
工業機器人的機械部分主要包括什么
的性能和穩定性。 1.1 支架 支架是工業機器人的基礎,通常由金屬材料制成,如鋼、鋁合金等。支架的設計需要考慮到機器人的負載能力、運動范圍和穩定性等因素。 1.2 臂部 臂部是





 工商網監
工商網監
評論