 NVIDIA Jetson 系列針對CSI攝像頭提供Camera SubSystem提高效率
NVIDIA Jetson 系列針對CSI攝像頭提供Camera SubSystem提高效率
在最開始介紹 Jetbot 的時候有提到,這套智能小車只使用一個 CSI 攝像頭作為全部輸入的設備,因為這種設備的體積輕巧、功耗較低,并且 NVIDIA Jetson 系列針對 CSI 攝像頭提供了一組 Camera SubSystem 來提高效率,非常適合用在智能車方案上的視頻圖像輸入。下表是各種攝像頭的簡單比較表,這樣就能一目了然地理解 Jetbot 為何挑選 CSI 攝像頭作為輸入設備。
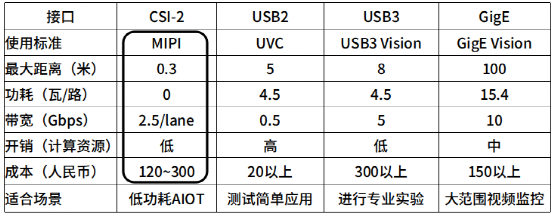
首先要提示的,Jetson Nano(含2GB)所支持的是 CSI-2 版本接口,早期用在樹莓派上 50 元以下的 CSI 接口攝像頭是不能使用的,主要以 IMX219 芯片的攝像頭為主,價格大約在 100 元以上,因此請勿選購錯誤。
本文并不花時間去說明 CSI 攝像頭的工作原理,主要配合 Jetbot 的安裝,以及執行最簡單指令去確認您手上的攝像頭是否良好可用,否則等整機都裝好之后再進行測試,如果遇到不良的攝像頭還得再拆卸下來,是一件頗為浪費時間的事情。
將CSI攝像頭裝到Jetson Nano(含2GB)上
這種接口并不支持即插即用(PnP, Plug and Play)功能,不能像 USB 攝像頭可以隨時插入 Jetson Nano(含2GB),必須在開機之前就先裝好。如果開機后測試發現不成功,就得關機后再檢查是否有什么地方安裝不正確?或者接觸不良的問題,就便利性而言不如 USB 攝像頭那么順手。
安裝 CSI 攝像頭的接口如下圖左方的卡座,要拔取卡筍進行安裝時千萬小心力度,這個塑料件比較脆弱,一不小心弄斷了,不僅無法再安裝 CSI 攝像頭,也嚴重影響 Jetson Nano(含2GB)的質保,需要非常小心處理!
卡座上透過一根專屬的軟排線(如上圖右)與 CSI 攝像頭進行連接,這個軟排線是有方向性的,如上圖右所顯示,軟排線有金屬針腳的一面要朝內(核心模塊)方向,將排線完整塞進卡座之后,再將卡筍往下壓,確保完全壓倒底,否則攝像頭可能因為排線接觸不良而無法正常工作。
請參考“菜鳥手冊(2):給 Jetson Nano 安裝 CSI 攝像頭”(https://cloud.tencent.com/developer/article/1421907)一文,有非常詳盡的步驟與動態簡圖能完整表達過程。總而言之,這個攝像頭的安裝有些細微之處,需要細心處理。一旦安裝測試好之后,也盡量不要拆卸。
測試CSI攝像頭的運行
由于 Jetbot 會關閉 Ubuntu 圖形桌面,因此過去所學到調用 nvarguscamera 指令,去啟動 CSI 攝像頭并在圖形桌面上顯示的方法,在這里都不能適用,但是 v4l2-ctl 工具還是能做最基本的檢測。
下面的測試都在 Jetbot 上的 Jupyter 環境上進行,也順便講解一下 Jupyter 上調用攝像頭與顯示內容的方法,先熟悉一下這方面的使用是很重要,因為后面所有實驗都要用到 CSI 攝像頭。
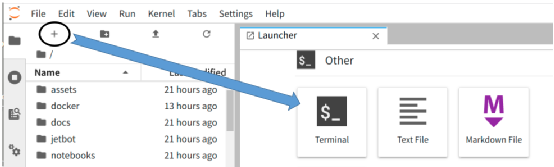
現在從 PC 上的瀏覽器輸入 “:8888” 進入 Jetbot 的 Jupyter 操作界面,然后開啟一個命令終端(如下圖):
現在先用 v4l2-ctl 工具檢查一下 CSI 攝像頭的狀況,請在終端輸入以下指令:
#如果是Docker版,請先安裝v4l-utils工具aptinstallv4l-utils#執行檢測指令v4l2-ctl--list-devices#如果檢測到/dev/video0,繼續檢測這個設備的細部參數v4l2-ctl --device=/dev/video0 --all
細部參數就不花時間說明,主要讓大家知道當有需要的時候,就可以用 v4l2-ctl 這個工具查看細節。
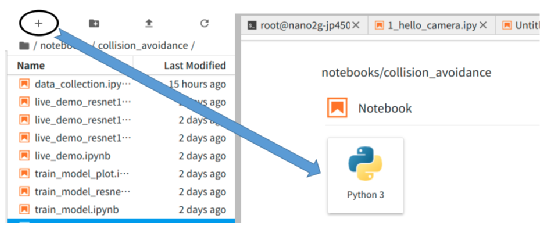
接下去開始用 Jupyter 的代碼,來測試 CSI 攝像頭的工作狀況。首先創建一個新的“Notebook”(如下圖步驟),這是 Jupyter 的工作區域。
每次新開的 Notebook 都是如下圖的狀況,會有一個[ ] 與一個方框:
現在就將下面代碼復制到在 Notebook 的方框內里,由于前面“v4l2-ctl”檢測到這個攝像頭的寬高為(1640, 1232),因此在代碼中將攝像頭與 widgets 的圖形尺寸都設為這兩個數字:
fromjetbotimportCamera,bgr8_to_jpegimportipywidgets.widgetsaswidgetsfromIPython.displayimportdisplayimporttraitletscamera=Camera.instance(width=1640,height=1232)image=widgets.Image(format='jpeg',width=1640,height=1232)camera_link=traitlets.dlink((camera,'value'),(image,'value'),transform=bgr8_to_jpeg)display(image)
然后按一下“Ctrl-Enter”組合鍵就能執行,正常的話就能在下方看到一個方框顯示攝像頭所捕捉的動態畫面,這樣就完成 CSI 攝像頭的測試。顯示有點小延遲是正常的,畢竟這里選擇的是(1640, 1232)尺寸,試試將尺寸都縮小到 1/2 之后,是不是就流暢的多?
如果要停止攝像頭播放,就用上面的“+”號添加一個“指令格”,然后在里面輸入:
camera_link.unlink()
然后用“Ctrl-Enter”執行這個指令,這時候顯示畫面就處于凍結狀態,不會播放顯示器所捕捉的內容。
假如想要讓攝像頭再次執行播放,就在下面再添加一個“指令格”,輸入:
camera_link.link()
按下“Ctrl-Enter”執行,就會看到顯示框里的內容又開始執行動態播放了。
代碼解說
由于 Jupyter 并不支持 OpenGL 功能,無法像圖形桌面那樣直接播放視頻,因此在這里需要使用一些固定的技巧,將視頻轉成圖形方式去顯示,上面這段代碼可以說是 Jetbot 所有實驗啟動 CSI 攝像頭的標準內容。
這個代碼中有幾個關鍵的部分:
1. jetbot的Camera模塊:
早期 Jetbot 的攝像頭是基于 NVIDIA 的 JetCam 項目,提供對 CSI 與 USB 兩類攝像頭的支持,不過最新版本中仿佛只對 CSI 攝像頭提供支持,并且將底層的代碼放在 jetbot/camera 下面的幾只 .py 里面。
這使得調用方式變得非常簡單,只要將寬與高提供給 Camera.instance (寬,高)就可以,不需要再指定攝像頭的編號。
2. ipywidgets:
這個模塊為 jupyter 提供非常好用的“互動式小部件”,為原本只提供靜態顯示的教學環境,注入非常生動與多樣化互動的功能。
熟悉圖形化開發工具的朋友就應該知道,很多這類工具會提供下拉式選項、滑塊調整、復選框、文字框這類的小部件,可以組建較為復雜的儀表盤。
在后面控制 Jetbot 車輪的實驗中會使用到多種這類小部件,這里只是用到比較簡單的 widgets.image 功能,設定輸出為“jpeg”格式圖像。
3. iPython.display:
這是一個 python 互動式界面里的顯示功能,這里就是將 widget.image 輸出的 jpeg 圖像顯示在 Jupyter。
4. traitlets:
如果從整個英文字去翻譯,這個庫就被稱為“叛徒庫”,其實是蠻奇怪的東西。但如果將這個字切割成“trait”與“-let”組合,就能解釋成“小特征”的含義,例如 booklet 是小冊子、eaglet 是小老鷹的意思。
這個庫的功能非常強大,除了能為我們處理“類型檢查”之外,還能為動態計算提供預設值、修改屬性之后發出更改的事件信號、處理屬性值之間的交互影響,為我們簡化很多復雜的交錯關系。
在上述代碼中“camera_link=traitlets.dlink((camera, 'value'), (image, 'value'), transform=bgr8_to_jpeg)”,將攝像頭讀取的圖像與 widgets.image 所創建的 image 對象產生動態關聯,并將攝像頭圖形執行“bgr8_to_jpeg”轉換,存放到 image 里,最后再由 display(image)顯示出來。
至于 camera_link 物件就能在后面透過.link()與.unlink()執行開關人任務,以實現“暫停”與“再啟動”的功能。
這樣我們對 Jetbot 攝像頭的調用與使用,就有個初步的了解,在后面實驗中就能更清楚的感受到這些功能的使用。
原文標題:NVIDIA Jetson Nano 2GB 系列文章(43):CSI攝像頭安裝與測試
文章出處:【微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
-
NVIDIA
+關注
關注
14文章
5240瀏覽量
105768 -
攝像頭
+關注
關注
61文章
4949瀏覽量
97657 -
瀏覽器
+關注
關注
1文章
1040瀏覽量
36080
原文標題:NVIDIA Jetson Nano 2GB 系列文章(43):CSI攝像頭安裝與測試
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
基于RK3576開發板的網絡攝像頭方案
RT1176是否有任何驅動程序示例可以通過并行攝像頭接口與8/10/12位攝像頭通信?
如何優化光耦電路以提高效率

大功率直流電源如何提高效率
飛凌嵌入式-ELFBOARD OV5640攝像頭講解第2期
飛凌嵌入式-ELFBOARD OV5640攝像頭簡介第二期
初創公司借助NVIDIA Metropolis和Jetson提高生產線效率
藍牙定位系統:實現精準定位、提高效率的利器

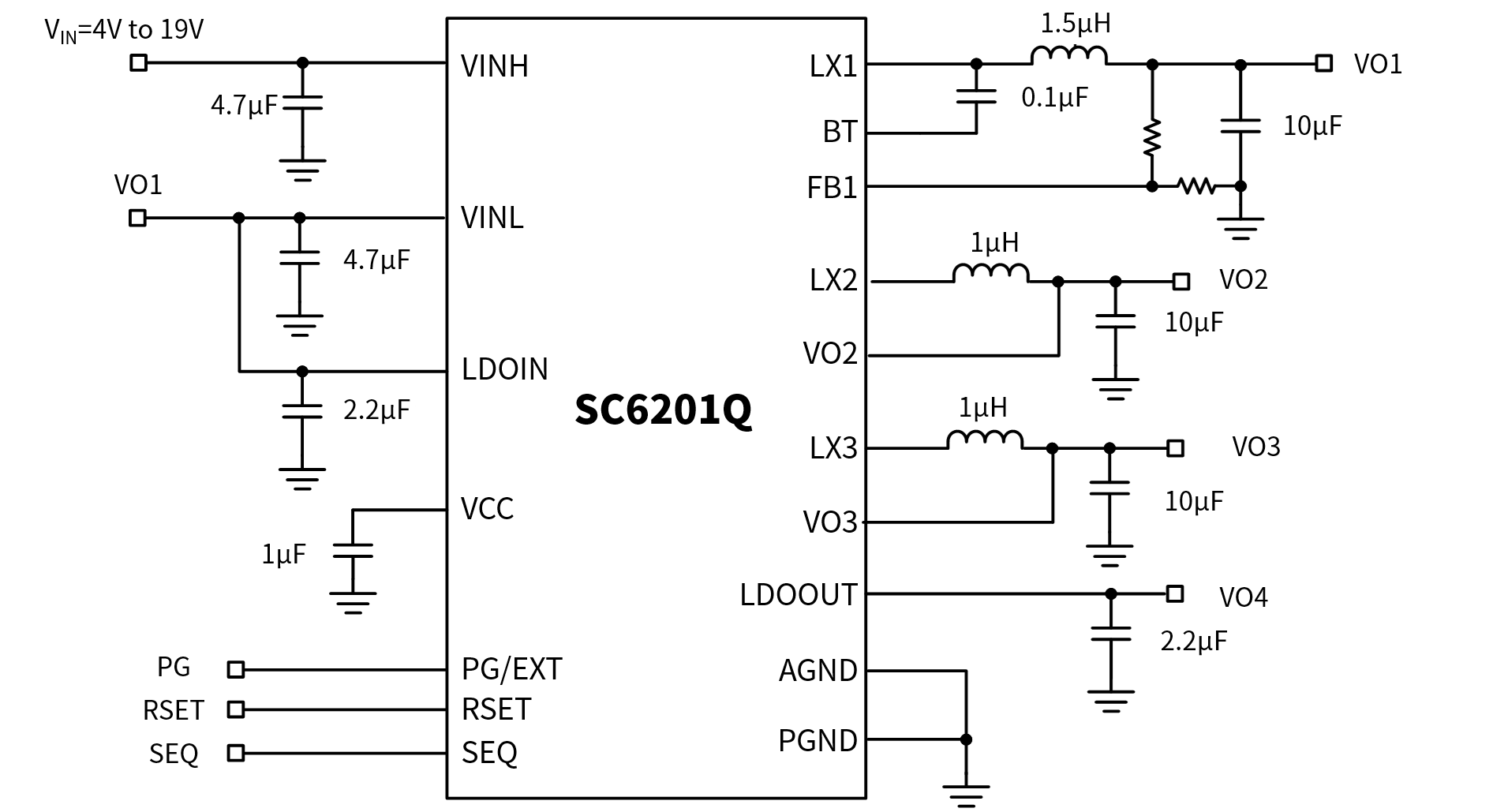
南芯科技發布單芯片車載攝像頭PMIC系列,為更高級別的智能駕駛提供支持
攝像頭氣密性測試設備:高精度,高效率

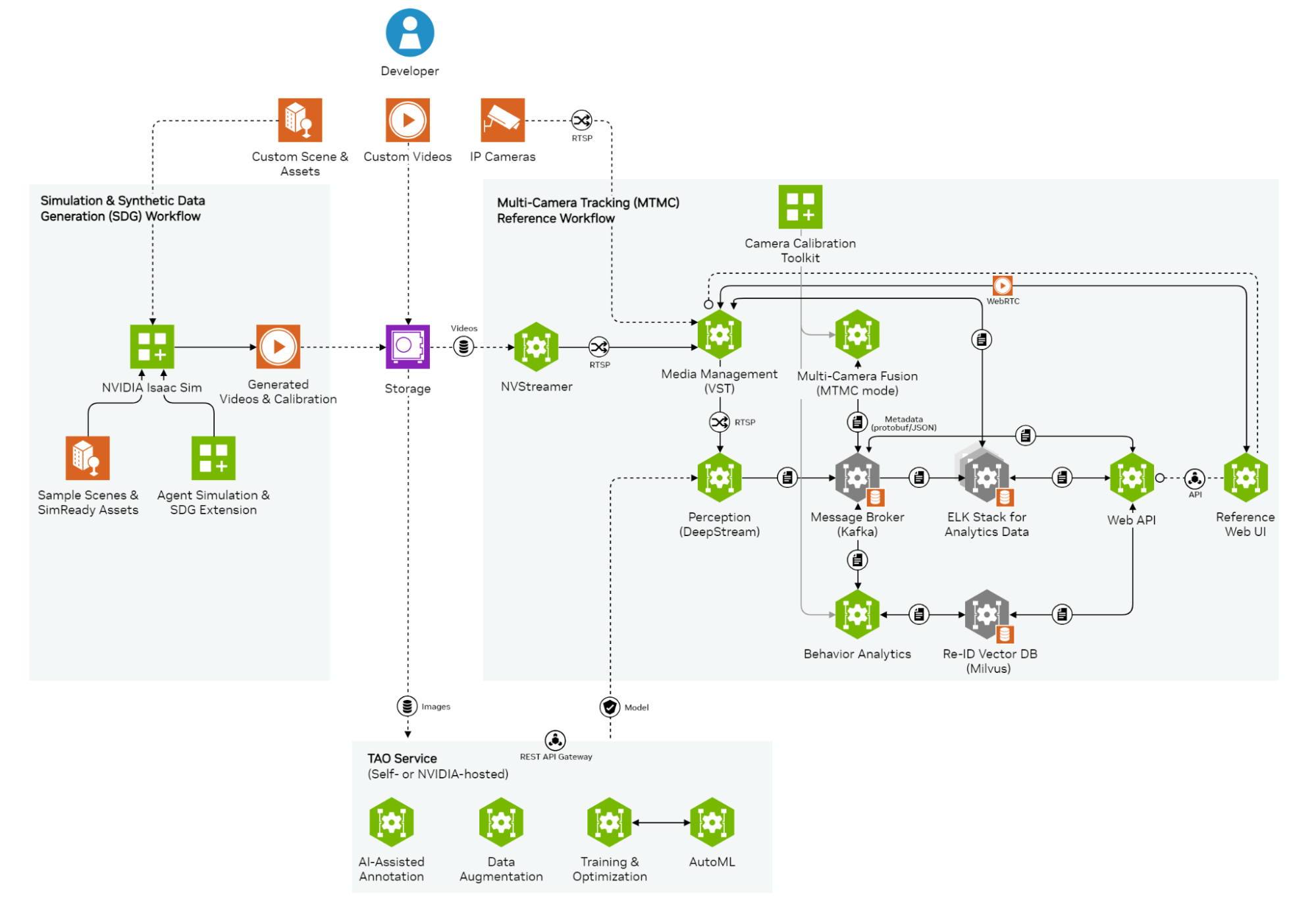
NVIDIA多攝像頭追蹤工作流的應用架構
激光焊接:CCM攝像頭模組精密制造的核心






 工商網監
工商網監
評論