 如何通過PCDK讀寫FANUC機器人IO
如何通過PCDK讀寫FANUC機器人IO
信息化是現代制造業的非常重要 的趨勢。我們在集成機器人的時候,總希望盡可能多的采集機器人信息,以還原機器人的原貌,從而對機器人進行分析,做出接下來的決策。FANUC為各位提供 了PC操作機器人的軟件接口—PC Developer’s Kits(以下簡稱PCDK)。
PCDK 是使PC和FANUC機器人系統高效通訊的功能強大的軟件工具,既可用于開發又可用于運行環境。它在Windows系統中快速運行,并且可以滿足絕大部分 需求。PCDK包含幾種PC與機器人控制器的接口:FTP、ECBR,Robot Server等。其中FTP、ECBR用于機器人文件的維護,而Robot Server用于讀寫變量、讀寫IO、與用戶程序協調合作,監控報警、控制流程、修改位置。我們使用Robot Server來讀寫機器人IO。
通 過PCDK讀寫FANUC機器人IO,采用的是面向對象的編程方法。PCDK內的Robot Server組件提供對象類FRCRobot(FRC表示Fanuc Robotics Class,是Robot Server內所有對象類名稱的前綴)。
編程者可以通過實例化該類的對象(以下稱為gobjRobot對象)來連接機器人并通過該對象的屬性和方法來獲取 機器人信息以及控制機器人。創建objRobot對象后,可以獲取該對象的一個屬性“FRCRobot.IOTypes”的引用,該屬性是我們完成機器人 IO信息讀寫的關鍵所在。具體步驟如下:
1)確保PC與機器人控制器之間的以太網物理連接。
2)創建及共享一個“FRCRobot”的引用:
Set gobjRobot= New FRCRobot
3)調用 “FRCRobot.Connect”方法來建立PC與機器人的連接:
gobjRobot.Connect ”robotname”
4)通過 “FRCRobot.Disconnect”事件來處理不連接的狀態。
5)通過“FRCRobot.IOTypes”讀寫IO。以給DO(1)賦值取反為例:
Dim objDigOut1 As FRCDigitalIOSignal
Set objDigOut1=gobjRobot.IOTypes.Item(frDOutType).Signals(1)
objDigOut1.Value = Not objDigOut1.Value
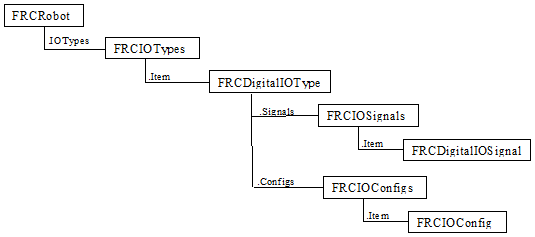
圖 中FRCRobot是“RobotServer”組件中唯一可被外部創建的對象類。任何需要和機器人控制器交互信息的應用,都需要通過這個類來獲得引用。FRCIOTypes和FRCIOSignals均為對象集合,前者包含了機器人控制器中所有已設置的I/O類型,譬如AI、AO或DI、DO等類型,后 者則包含了屬于某一特定I/O類型的所有I/O信號,例如所有屬于DI類型的I/O信號。值得注意的是FRCRobot.IOTypes屬性即一個 FRCIOTypes類對象。
發那科噴涂應用的上位機軟件PaintWorks4是一套功能完備的機器人和涂裝工藝設備管理軟件,它正是采用PCDK來采集機器人數據,控制機器人部分功能。以下是其中一個子程序RobotI/O,其作用就是對機器人IO進行操作,這個功能正是采用了上述的方法。
讀寫機器人IO是PCDK提供的功能中的比較基礎的一項。PaintWorks4軟件,除了IO讀寫功能以外,還具有可以讀寫機器人的變量,修改工藝參數,操作機器人文件等功能。
總之,PCDK可以在編寫PC讀寫控制機器人的上位機程序時,給編程者提供了很大的便利。
責任編輯:haq
-
機器人
+關注
關注
213文章
29498瀏覽量
211565 -
PC
+關注
關注
9文章
2143瀏覽量
156045
原文標題:通過PC Developer’s Kits讀寫FANUC機器人IO
文章出處:【微信號:Cambricon_Developer,微信公眾號:寒武紀開發者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
發那科機器人A型控制柜急停板安全回路接線方法
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+初品的體驗
EtherNetIP轉Profinet網關連接發那科機器人配置實例解析






 工商網監
工商網監
評論