 發那科機器人A型控制柜急停板安全回路接線方法
發那科機器人A型控制柜急停板安全回路接線方法
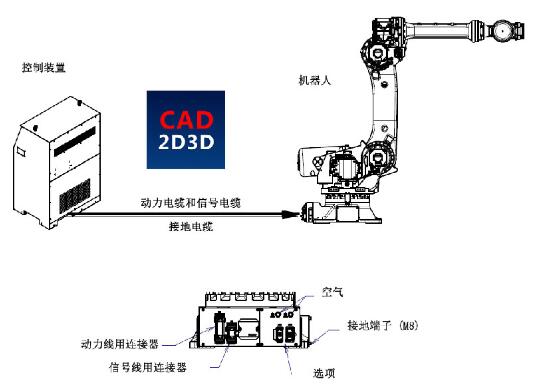
發那科機器人A型控制柜的安全回路接口涵蓋了外部急停輸入、安全門開關、機器人急停輸出以及伺服切斷等多個功能,這些接口均通過硬接線進行連接。在操作FANUC機器人時,必須啟用急停板安全回路,任何試圖用其他方法替代急停板安全回路的做法都是嚴禁的。本文將詳細介紹FANUC機器人A型控制柜的急停板安全回路接口及其接線方法。
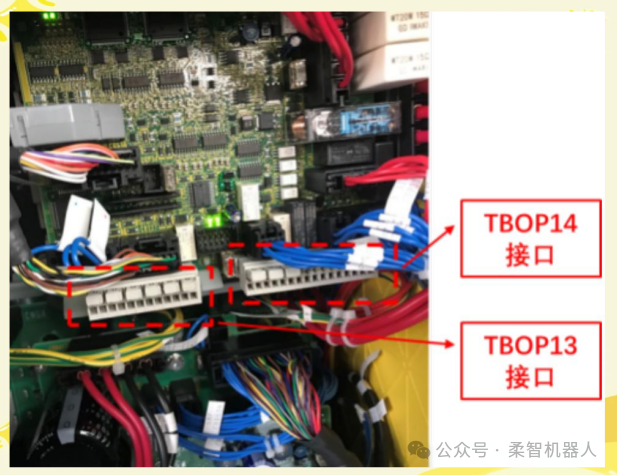
首先,讓我們了解一下A型控制柜的基本結構。A型控制柜,簡稱A柜,其內部左上角位置是急停電路板的所在。其次,我們將聚焦于A型控制柜的急停板安全接口。該接口包含兩個白色的端子臺:TBOP13和TBOP14。
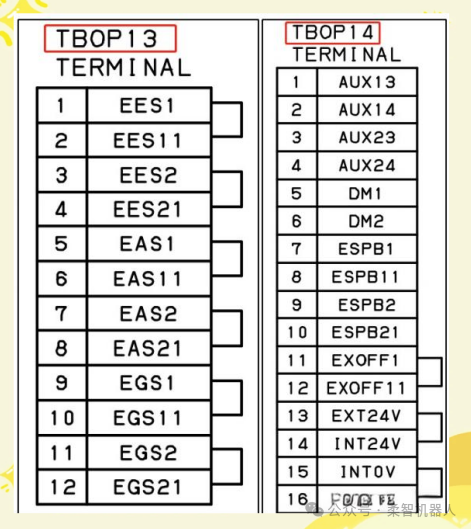
TBOP13端子擁有12個接口,從右至左編號為1-12,其接口定義詳見下圖。具體來說,1-4號接口為外部急停輸入雙回路(EES),5-8號接口為安全門雙回路(EAS),而9-12號接口則為伺服通斷雙回路(EGS)。這些接口在出廠時已默認設置為短接狀態。
TBOP14端子則配備了16個接口,編號同樣從右至左為1-16,其接口定義同樣展示在下圖中。其中,7-10號接口常用于機器人急停輸出雙回路(ESPB),而11-12號接口則涉及外部電源通斷開關(EXOFF)。需注意,11-16號接口在出廠時也是預設為短接狀態。
3 A-控制柜安全回路接線
1)外部急停輸入
在開始接線之前,請務必確保機器人已完全斷電。完成接線后,應使用萬用表進行檢驗,以確保接線無誤。
外部急停輸入部分包含安全雙回路設計,具體如下:1-EES1與2-EES11,3-EES2與4-EES21,這兩組觸點各自獨立,且在出廠時已預設為短接狀態。
在需要啟用外部急停輸入功能時,需先移除原有的短接片,接著按照圖示進行正確的接線操作。
完成上述接線后,若外部急停被觸發,機器人會即刻停止所有動作并觸發報警系統。
注意:在接線過程中,有些用戶可能會考慮簡化操作,提出將EES2短接到EES1,EES21短接到EES11,或者僅短接其中一個回路,然后僅在外部接入一個回路。然而,這些做法都是嚴格禁止的,因為它們可能導致保險絲燒毀或鏈路異常報警。務必遵循上述的接線方法,確保雙回路中的兩個回路能夠獨立且同步地工作。
2)安全門開關
安全門開關設計為安全雙回路,如上圖所示,5-EAS1與6-EAS11,7-EAS2與8-EAS21構成兩組獨立的觸點,出廠時默認處于短接狀態。
若需使用安全門開關,需移除短接片并按照接線方法進行連接。連接完成后,當門開關打開時,機器人將只能執行手動操作,無法啟動自動運行。
3)伺服通斷開關
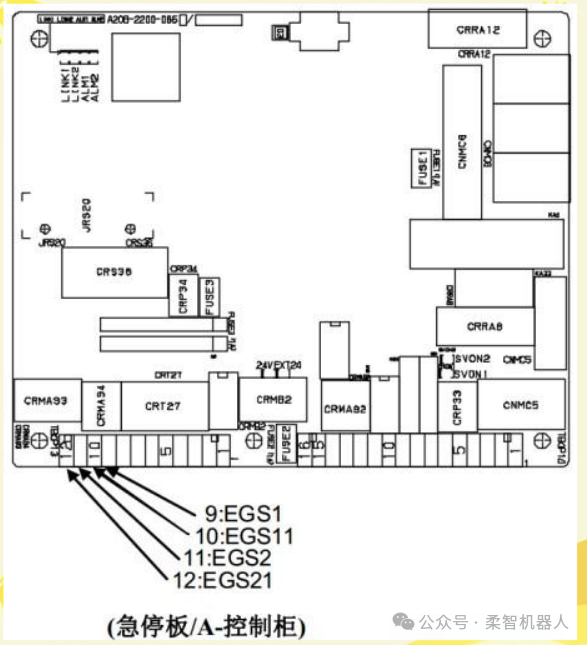
伺服通斷開關同樣設計為安全雙回路,其觸點組合為9-EGS1與10-EGS11,以及11-EGS2與12-EGS21,這兩組觸點在出廠時默認處于短接狀態。
若需啟用伺服通斷開關,需先移除短接片,并參照外部急停輸入的接線方法進行連接。一旦伺服通斷開關斷開,機器人將無法正常伺服上電,并會觸發報警機制。
4)外部電源通斷開關
外部電源通斷開關在出廠時同樣處于短接狀態,其觸點編號為11-EXOFF1與12-EXOFF11。通過移除短接片并按照特定接線方法進行連接,即可啟用該開關。一旦外部電源通斷開關斷開,機器人將無法正常接收外部電源供電,從而觸發相應的報警機制。
當需要啟用外部電源通斷開關時,應首先移除短接片,并按照相應的接線方法進行連接,如上圖所示。在外部電源通斷開關處于閉合狀態時,可以利用機器人斷路器來執行控制裝置的上電操作;然而,一旦外部電源通斷開關斷開,便無法通過機器人斷路器進行上電操作。
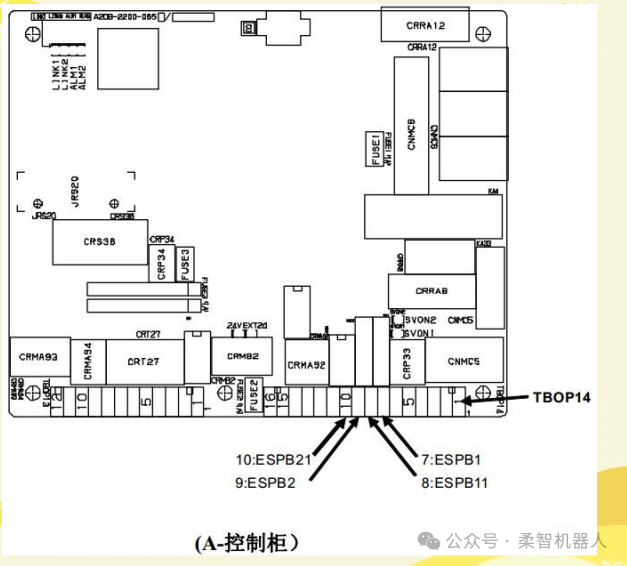
此外,機器人還配備了安全雙回路的急停輸出功能,包括7-ESPB1與8-ESPB11,9-ESPB2與10-ESPB21兩組獨立的觸點,以確保在緊急情況下能夠迅速切斷電源,保障操作安全。
當需要啟用機器人急停輸出功能時,只需在相應的觸點上按照外部急停輸入的接線方法進行連接即可。系統急停輸出的控制原理如下:一旦示教器或控制面板上的急停按鈕被按下,線圈KA21和KA22的電源將被切斷,同時ESPB1至ESPB11以及ESPB12至ESPB21的觸點將被激活。此外,當控制裝置的電源被斷開時,無論急停按鈕的狀態如何,這些觸點同樣會保持開啟狀態。
4 安全回路測試
1)急停回路測試
測試急停按鈕功能:在機器人低速運行狀態下,逐個按下系統設定的急停按鈕,觀察機器人是否能夠迅速產生急停并停止運動。同時,查看機器人示教器上的報警代碼是否顯示為SRVO-007(表示機器人外部急停)。若機器人未能立即停止或報警代碼不符,則需檢查整個急停回路的線路連接。
2)安全門回路測試
測試門開關功能:在低速運行狀態下,逐個打開安全門,觀察機器人是否能夠立即停止運行并發出報警。查看示教器上的報警代碼,確認是否為SRVO-004。通常,系統中的所有安全門都是串聯連接的,因此若任意安全門無法觸發安全停止,請檢查安全門回路的連接是否正常。
5 常見報警及處理
1 SRVO-213 E-STOP Board FUSE2 blow
故障現象:機器人顯示“SRVO-213 E-STOP Board FUSE2 blow”(急停板保險絲2熔斷)的報警。
故障原因:在使用急停板安全回路時,可能由于信號接線錯誤或短路導致保險絲熔斷。
處理方案:首先檢查急停板安全回路的接線,確保無誤后,若問題仍未解決,再進一步排查其他硬件故障,如急停板本身的故障。
2 SRVO-230 或 SRVO-故障現象:機器人出現與鏈路異常相關的報警,如SRVO-230或SRVO-231。
故障原因:在使用急停板安全回路時,可能發生了雙回路安全信號的不一致,即回路1和回路2的接點狀態出現矛盾。
處理方案:同樣需要檢查急停板安全回路的接線,確保雙回路信號的一致性。若無法解決問題,再進一步排查其他硬件故障。
-
機器人
+關注
關注
213文章
29463瀏覽量
211517 -
接口
+關注
關注
33文章
8932瀏覽量
153188 -
接線
+關注
關注
29文章
759瀏覽量
33759 -
控制柜
+關注
關注
4文章
167瀏覽量
15661
原文標題:FANUC機器人控制柜急停板接線方法
文章出處:【微信號:faircs,微信公眾號:柔智機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
RC180愛普生機器人控制柜
ABB機器人控制柜報警相關數據恢復的維修介紹
發那科機器人系統回收 發那科機器人配件常年高價回收
YAMAHA機器人 RCX240控制柜參數
發那科推出推出兩款新型長臂版協作型機器人,具有哪些優勢
基于KUKA C4機器人的控制柜(CCU)設計






 工商網監
工商網監
評論