 智能掃地機器人好用嗎?選購前先參照這四大要素
智能掃地機器人好用嗎?選購前先參照這四大要素
大多數人都存在愛干凈卻又討厭打掃的矛盾。幸運的是,掃地機器人的出現完美解決了這一窘境,成為眾多家庭清潔家電的新寵。然而,還有很多消費者對掃地機器人的了解并不多,以至于在選購的時候容易跟風買到不適合自己的產品。今天,給大家梳理了一份掃地機器人選購參照攻略,快來看看吧。
掃地機器人選購參照
看定位系統
考量一臺掃地機器的好壞,先看它的定位系統。因為這關乎掃地機器人智能化程度最直觀的表現。目前市場上掃地機的定位系統主要有兩種:LDS激光導航定位系統和VSLAM圖像位移定位系統。它們各有優劣勢:前者定位精確度,但激光頭造價貴且容易損耗;后者對硬件和參照物特征要求高,定位精度波動性大。
看清潔系統
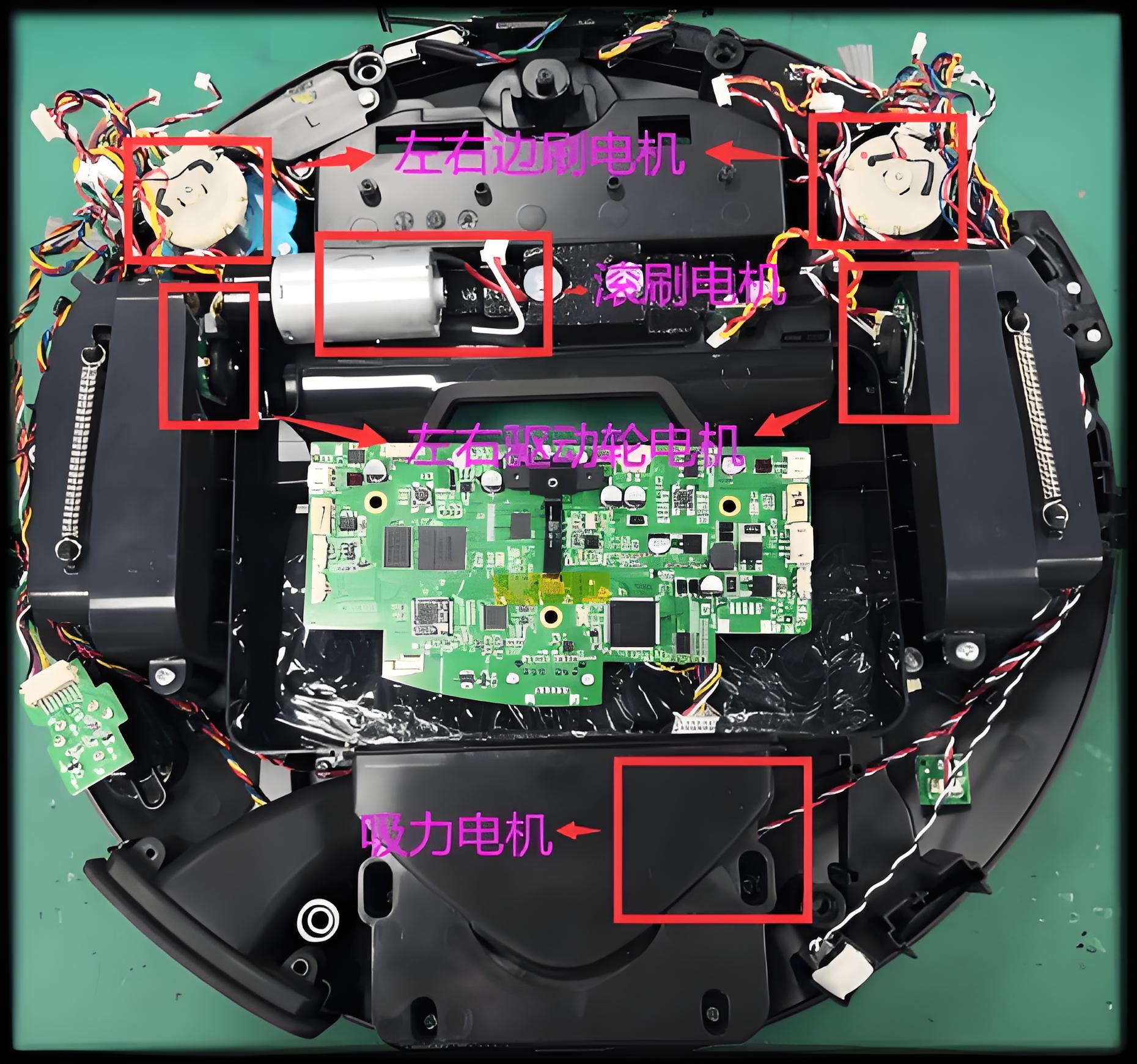
與傳統吸塵器不同,掃地機器人更看重“掃吸”配合。其中,“掃”是指邊刷和吸口處的滾刷,“吸”是指底部的真空吸口。
邊刷是我作用是將掃地機器人無法抵近的墻邊和角落的灰塵清掃出來,而滾刷的作用是將位于掃地機底部的灰塵掃起,讓灰塵通過吸塵口進入集塵盒,并且還能將部分粘著地面的臟污清掃干凈,潔凈效果顯著。
關于吸口設計,它分有不帶滾刷和帶滾刷的。不帶滾刷的掃地機器人吸口小,可以聚攏吸力,但覆蓋的清潔面積,容易清潔不徹底;帶滾刷的掃地機器人,可以緊密貼合地面的凹凸處,深度清潔縫隙處的灰塵。
看吸力表現
吸力的強弱取決于電機的好壞,況且電機是掃地機心臟般的存在。市面上有無刷電機和有刷電機之分。無刷電機具有工作噪音大小、耗電量小、使用壽命長的優點,而有刷電機剛好相反,由此市面上中高端掃地機器人不會使用有刷電機。
看品牌和研發技術
對于智能掃地機器人來說,專業品牌不僅能提供先進的技術支持,還具備完善的售后服務。而那些中途進入掃地機器人領域的“半吊子”品牌,在技術和售后方面都不具備真正的保障。因此,大家在選購時,建議優先國際專業品牌。
掃地機器人選購推薦
1.Uoni由利掃地機器人
Uoni由利掃地機器人V980 Plus,配置定制的ASAR-V9動態路徑規劃系統和第8代激光導航系統,可以360°無死角巡視居家環境,并實時更新記憶構建全屋地圖,有條不紊地規劃清掃路線。機身還配置了25組傳感器,能讓掃機器人迅速適應不同的家居環境,清掃時與家具各自安好,避免異物纏繞和隨處亂撞的問題。電機配置為日本原裝進口的NIDEC無刷電機,具備2700Pa的強勁吸力,可以輕松清除地面各類垃圾。另外,它還搭載集塵寶自動集塵,免去了清理塵盒的麻煩,十分便利。
2.ECOVACS科沃斯掃地機器人
科沃斯掃地機器人T8 AIVI在定位技術上升級采用了dToF導航,具有精度更高、探測距離更遠、壽命更長、功耗更低等優勢。清潔時,它配置了OZMO Pro高頻電動擦地模組,可以對地面進行仿人工擦拭般的深度清潔。另外,它還設有攝像巡視功能,但有用戶反饋視頻顯示像素一般,而且攝像只能依靠機器遠近來控制,覆蓋范圍有限。對于有沒寵物的家庭來說,這一功能不太適用。
3.Roborock石頭掃地機器人
石頭掃地機器人T7 Pro配置了AI雙目避障以及激光雷達導航系統,可以讓機器具有更好的空間感,通過左右攝像頭的拍攝圖像獲取到RGB 圖像信息與深度信息,從而對房間內的物體進行3D 建模、測距,實現高效避障。在工作時,無論是清掃還是拖地,T7 Pro都能針對不同房間設置不同的吸力標準和水量檔位。
4.NARWEL云鯨掃地機器人
云鯨掃地機器人小白鯨是全球第一款實現自洗拖布的機器人。在使用時,小白鯨會根據所安裝的模塊,自動識別進入掃地或拖地模式;另外,通過搭載清潔基站,這款拖地機在清潔完一定面積后,會自動識別拖布的臟污程度,并且自動返回基站對拖布進行清洗。這一設計為用戶提供了便利,但頻繁洗拖布,導致耗水量大,且日常清潔中還得對水箱及時進行凈水補充以及污水處理。
5.iRobot艾羅伯特掃地機器人
美國艾羅伯特iRobot是最早最成熟的機器人生產品牌,在全球多個區域保持著領先地位。旗下推出新一代的掃地機器人iRobot S9+,新增了先進由先進3D傳感器加持的PerfectEdge技術,解決了邊角清潔的難題;同時也保留了之前的Clean Base自動集塵設計,省去手動清理塵盒。但它的掃地機器人主推掃拖分離的解決方案,整體購買成本較高,日常靜置占地空間大。
發布評論請先 登錄
鈞敏科技AM2355驅動芯片在掃地機器人中的應用
高端掃地機器人市場銷額第一!追覓再創行業新標桿
智能掃地機器人的工作原理和構成
大疆或明年中期推出高端掃地機器人
掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
掃地機器人的核心技術突破
掃地機器人避障技術的發展史
湯誠科技推出掃地機器人、洗地機應用方案,?為品質生活添彩
隱形清潔大師:灰塵顆粒物壓電傳感器引領掃地機器人新一輪智能清潔革命

供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標準詳解及試驗方法

光耦知識分享‖探討光耦技術在掃地機器人的應用






 工商網監
工商網監
評論