 詳解S型加減速曲線規劃算法總結
詳解S型加減速曲線規劃算法總結
做過運動控制的小伙伴都知道,S曲線很重要,下面一張動圖對比一下,你就知道S曲線的好處:
下面分享一下S曲線的內容:
1 前言
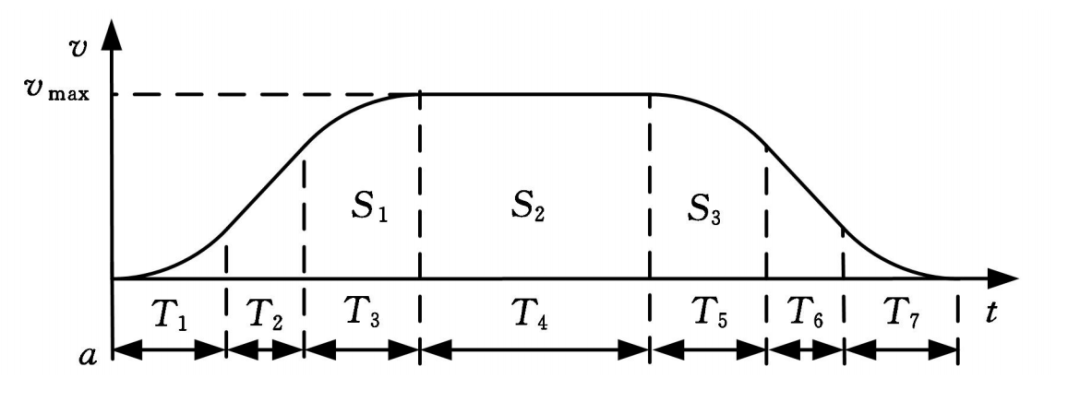
S形加減速的最重要特征是該算法的加速度/減速度曲線的形狀如字母 S。S形加減速的速度曲線平滑 ,從而能夠減少對控制過程中的沖擊,并使插補過程具有柔性 [^1]。由于T形曲線在加速到勻速的切換過程中,實際中存在較大過沖,因此這里對比一下T曲線和7段S曲線的實際過程;
T形:加速 -》 勻速 -》 減速
S形:加加速() -》 勻加速() -》 減加速()-》 勻速()-》 加減速()-》 勻減速()-》 減減速()
上文在加速這塊的文字描述可能讀起來起來有點繞,下面看圖:
2 理論
分析由于S曲線在加減速的過程中,其加速度是變化的,因此這里引入了新的一個變量 ,即加加速度。
因此對應上圖的7段S速度曲線中,規定最大加速為,最小加速度為,則加速度的關系;
加加速():逐漸增大;
此時
勻加速():達到最大;
此時
減加速():逐漸減小;
此時
勻速():不變化;
此時
加減速(): 逐漸增大;
此時
勻減速(): 達到最大;
此時
減減速(): 逐漸減小;
此時
“為加速度的絕對值;其中
所以通常需要確定三個最基本的系統參數 :系統最大速度 ,最大加速度a_{max} ,加加速度,就可以可確定整個運行過程[^2] ;
最大速度:反映了系統的最大運行能力 ;
最大加速度:反映了系統的最大加減速能力 ;
加加速度:反映了系統的柔性;
柔性越大,過沖越大,運行時間越短;
柔性越小,過沖越小,運行時間越長;
2.1 加速度時間關系方程
整個加速度變化的過程具體如下圖所示;
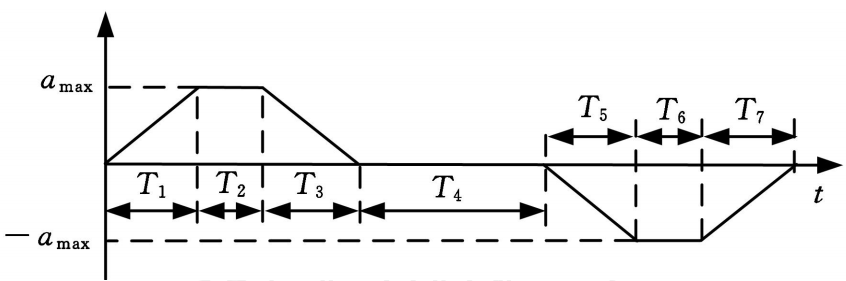
再次強調一下 和 的關系,另外這里再引入變量 ,
比如,當前時刻 ,即 位于區間 ,則如果將 作為初始點,則 為 相對于時刻的時間,則有:
下面可以得到加速度與時間的關系函數,具體如下:
根據 ① 式,將 代入 ② 式可以得到:
上式中 ;
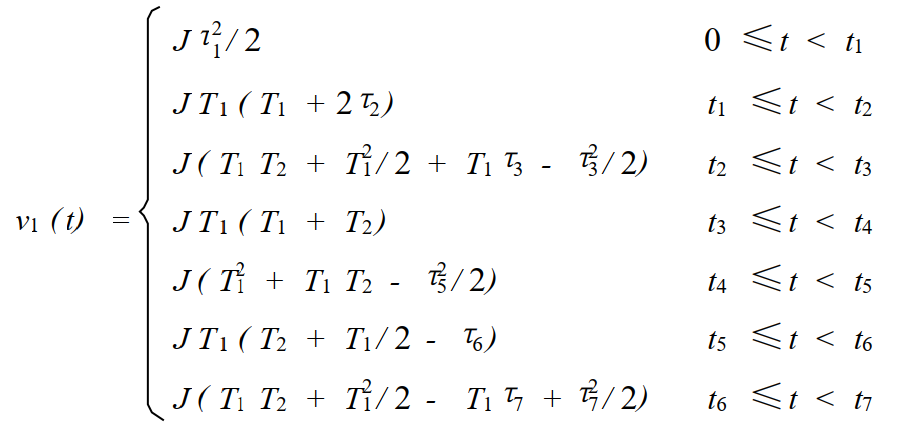
2.2 速度時間關系方程
速度和加速度滿足 ;加加速度和速度的關系滿足:
結合加速度時間關系并結合② 式可以得到速度曲線關系,具體關系如下圖所示;
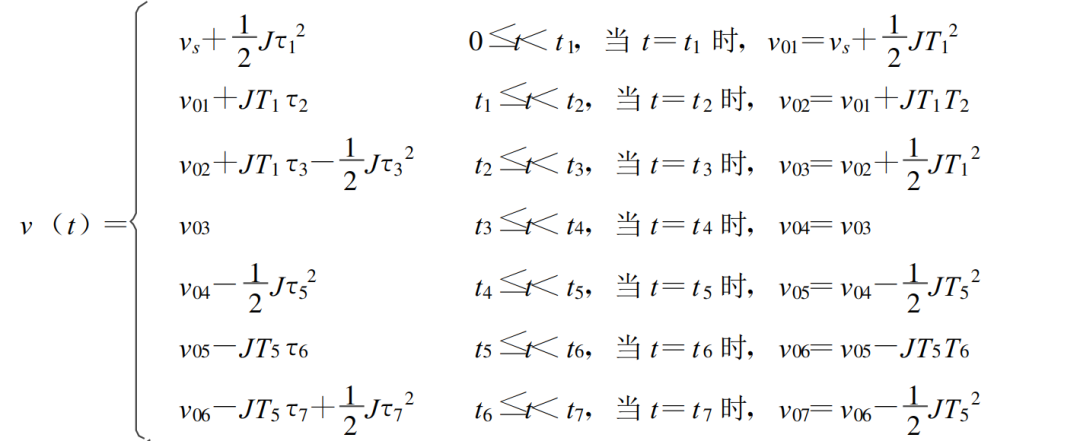
進一步簡化可以得到:
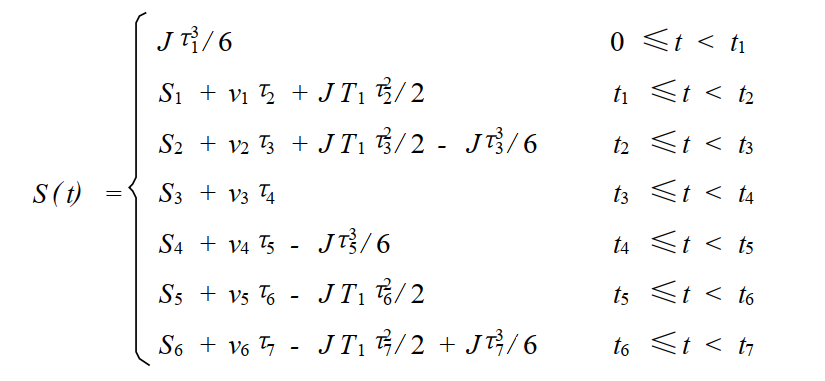
2.3 位移時間關系方程
位移 和加加速度 直接滿足關系如下:
簡單推導
因此可以得到:
“積分忘的差不多了,回去再復習一下;
最終位移的方程如下所示;
3 程序實現的思路
正如前面所提到的,S曲線規劃需要確定三個最基本的系統參數 :系統最大速度 ,最大加速度a_{max} ,加加速度,這樣就可以確定這個運行過程。這里有一個隱性的條件,就是在運行的過程中可以達到最大速度,這樣才是完整的7段S曲線,另外這里還有一些中間參數:
,因此有 ;
加加速度 ;
;
,用戶給定整個運行過程所需要的時間;
但是通常實際過程中關心,,;
3.1 推導
理想狀態假設存在 和,則推導過程如下:
因此可以得到:
簡化之后得到:
根據②式可知:
最終得到:
下面可以根據位移時間關系方程進行離散化的程序編寫。
假設可以到達最大速度,且用戶給定了整個過程運行時間,則 的推導如下:
簡化上式可以得到:
根據 代入上式可得:
3.2 的推導
這時候還剩下需要計算,通過已量 可以推導出來;首先位移之間滿足關系如下:
其中加速區長度為 ;其中減速區長度為 ;
具體推導;[^2]前面提到過,,因此在=0的時候,則
這里簡單推導一下:
根據④,⑤最終簡化得到:
“:為運行的總時間:為運行的總路程
詳細推導過程如下:
因為:
因為:
所以,簡化得到:
所以可以得到:
因為:
將其代入可以得到:
簡化得到最終結果:
4 matlab
程序matlab程序親測可以運行,做了簡單的修改,因為這里直接給定了整個運行過程的時間,所以需要在SCurvePara函數中求出加加速度 的值,路程為 1:
SCurvePara
function [Tf1,V,A,J,T] = SCurvePara(Tf, v, a)
T = zeros(1,7);
for i=1:1000
% 加加速度 J
J = (a^2 * v) / (Tf*v*a - v^2 - a);
% Tk
T(1) = a / J;
T(2) = v / a - a / J; % t2 = v / a - t1;
T(3) = T(1);
T(4) = Tf - 2 * a / J - 2 * v / a; % t4 = Tf - 4*t1 - 2*t2;
T(5) = T(3);
T(6) = T(2);
T(7) = T(1);
% 根據T2和T4判斷S曲線的類型
if T(2) 《 -1e-6
a = sqrt(v*J);
display(‘t2《0’);
elseif T(4) 《 -1e-6
v = Tf*a/2 - a*a/J;
display(‘t4《0’);
elseif J 《 -1e-6
Tf = (v^2 + a) / (v*a) + 1e-1;
display(‘J《0’);
else
break;
end
end
A = a;
V = v;
Tf1 = Tf;
end
SCurveScaling
function s = SCurveScaling(t,V,A,J,T,Tf)
% J = (A^2 * V) / (Tf*V*A - V^2 - A);
% T(1) = A / J;
% T(2) = V / A - A / J; % T(2) = V / A - T(1);
% T(3) = T(1);
% T(4) = Tf - 2 * A / J - 2 * V / A; % T(4) = Tf - 4*T(1) - 2*T(2);
% T(5) = T(3);
% T(6) = T(2);
% T(7) = T(1);
%%
if (t 》= 0 && t 《= T(1))
s = 1/6 * J * t^3;
elseif ( t 》 T(1) && t 《= T(1)+T(2) )
dt = t - T(1);
s = 1/2 * A * dt^2 + A^2/(2*J) * dt.。.
+ A^3/(6*J^2);
elseif ( t 》 T(1)+T(2) && t 《= T(1)+T(2)+T(3) )
dt = t - T(1) - T(2);
s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt 。..
+ 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
elseif ( t 》 T(1)+T(2)+T(3) && t 《= T(1)+T(2)+T(3)+T(4) )
dt = t - T(1) - T(2) - T(3);
s = V*dt 。..
+ (-1/6*J*T(3)^3) + 1/2*A*T(3)^2 + (A*T(2) + A^2/(2*J))*T(3) + 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
elseif ( t 》 T(1)+T(2)+T(3)+T(4) && t 《= T(1)+T(2)+T(3)+T(4)+T(5) )
t_temp = Tf - t;
dt = t_temp - T(1) - T(2);
s = -1/6*J*dt^3 + 1/2*A*dt^2 + (A*T(2) + A^2/(2*J))*dt 。..
+ 1/2*A*T(2)^2 + A^2/(2*J)*T(2) + A^3/(6*J^2);
s = 1 - s;
elseif ( t 》 T(1)+T(2)+T(3)+T(4)+T(5) && t 《= T(1)+T(2)+T(3)+T(4)+T(5)+T(6) )
t_temp = Tf - t;
dt = t_temp - T(1);
s = 1/2 * A * dt^2 + A^2/(2*J) * dt + A^3/(6*J^2);
s = 1 - s;
elseif ( t 》 T(1)+T(2)+T(3)+T(4)+T(5)+T(6) && t 《= T(1)+T(2)+T(3)+T(4)+T(5)+T(6)+T(7) + 1e5 )
t_temp = Tf - t;
s = 1/6 * J * t_temp^3;
s = 1 - s;
end
end
測試的代碼如下:TEST
%%
N = 500;
ThetaStart = 0; %起始位置
ThetaEnd = 90; %最終位置
VTheta = 90; %1 速度
ATheta = 135; %1.5 加速度
Tf = 1.8; % 總行程時間
v = VTheta/(ThetaEnd - ThetaStart);
a = ATheta/(ThetaEnd - ThetaStart);
v = abs(v);
a = abs(a);
Theta = zeros(1,N);
s = zeros(1,N);
sd = zeros(1,N);
sdd = zeros(1,N);
[TF,V,A,J,T] = SCurvePara(Tf, v, a);
display(J, ‘J:’);
display(TF,‘Tf:’);
display(V,‘v:’);
display(A, ‘da:’);
display(TF-Tf,‘dTf:’);
display(V-v,‘dv:’);
display(A-a, ‘da:’);
t=linspace(0,TF,N);
dt = t(2) - t(1);
for i = 1:N
if i == N
a = a;
end
s(i) = SCurveScaling(t(i),V,A,J,T,TF);
Theta(i) = ThetaStart + s(i) * (ThetaEnd - ThetaStart);
if i》1
sd(i-1) = (s(i) - s(i-1)) / dt;
end
if i》2
sdd(i-2) = (sd(i-1) - sd(i-2)) / dt;
end
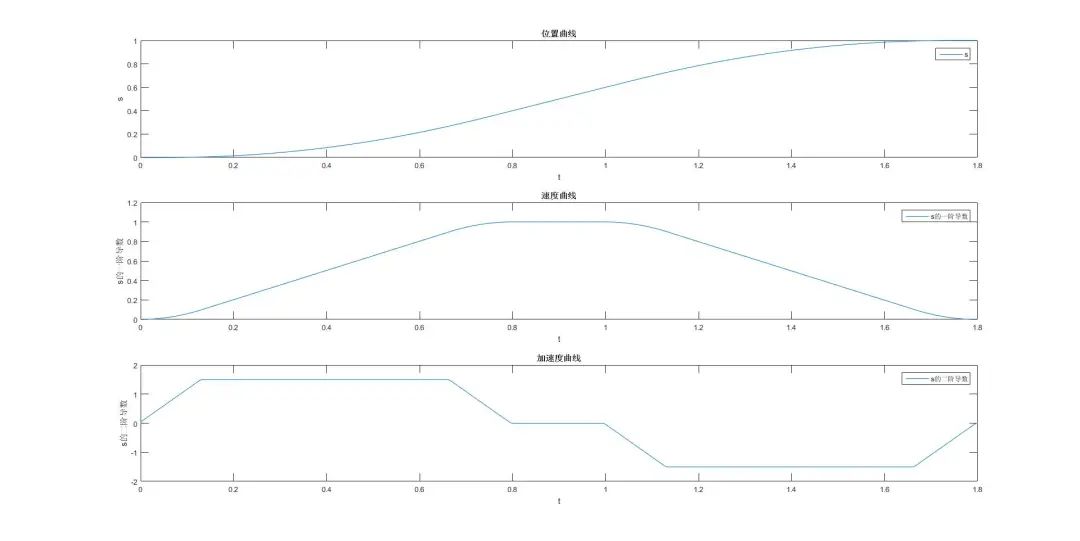
end
subplot(3,1,1);
legend(‘Theta’);
xlabel(‘t’);
subplot(3,1,1);
plot(t,s)
legend(‘位移’);
xlabel(‘t’);
title(‘位置曲線’);
subplot(3,1,2);
plot(t,sd);
legend(‘速度’);
xlabel(‘t’);
title(‘速度曲線’);
subplot(3,1,3);
plot(t,sdd);
legend(‘加速度’);
xlabel(‘t’);
title(‘加速度曲線’);
看到最終仿真結果和預期相同;
最后再看一下T形和S形速度曲線規劃的效果對比:
5 總結
本文只對7段的S曲線規劃做了詳細的推導和介紹,matlab中的程序對于4段和5段都有做實現,很多是在理想情況下進行推導的,初始速度默認為0,終止速度也為0,并且假設加減速區域相互對稱。最終運行結果符合預期效果。
“文中難免有錯誤和紕漏之處,請大佬們不吝賜教創作不易,如果本文幫到了您;
6 參考
[^1]:陳友東 魏洪興 王琦魁。數控系統的直線和 S 形加減速離散算法[D]。北京:中國機械工程,2010.
[^2]:郭新貴 李從心 S 曲線加減速算法研究 上海交通大學國家模具 CAD 工程研究中心 , 200030
編輯:lyn
-
matlab
+關注
關注
188文章
2995瀏覽量
233157 -
運動控制
+關注
關注
4文章
635瀏覽量
33352
原文標題:硬核 | S速度曲線規劃算法總結
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
時源芯微 PCB 布線規則詳解
線性模組為什么會限定一個加減速時間?

具身智能工業機器人路徑規劃算法成為破局關鍵
SVPWM的原理及法則推導和控制算法詳解
MCSDK位置控制S形軌跡規劃q軸電流存在沖擊怎么解決?
網絡筆記分享-實時生成步進電機速度曲線

諧波減速器工作原理 諧波減速器與齒輪減速器的區別
如何選擇合適的AWG線規
ZMC600E運動控制器T型、S型速度規劃詳解

減速電機概述了解多少?
多臺倉儲AGV協作全局路徑規劃算法的研究






 工商網監
工商網監
評論