") 基于DSP芯片和BF-533EZ-KitLite評估板實現(xiàn)車道偏離報警系統(tǒng)的設計
基于DSP芯片和BF-533EZ-KitLite評估板實現(xiàn)車道偏離報警系統(tǒng)的設計
一、引言
在世界范圍內(nèi),公路交通事故導致驚人的人員傷亡和經(jīng)濟損失。據(jù)統(tǒng)計,約有44%的汽車事故與車輛偏離正常車道行駛有關,其主要原因是駕駛員注意力不集中或者疲勞駕駛,造成車輛的無意識偏離。車道偏離報警系統(tǒng)(簡稱LDWS或RDWS)正是基于基本交通規(guī)則的車輛安全系統(tǒng),其主要功能是輔助過度疲憊或者長時間單調(diào)駕駛的駕駛員保持車輛在車道內(nèi)行駛。由于LDWS具有顯著提高車輛行駛主動安全性的潛力,得到了國內(nèi)外研究人員越來越多的重視。因此該系統(tǒng)具有廣泛的市場潛力與應用價值。
二、系統(tǒng)總體設計
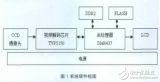
車道偏離報警系統(tǒng)的系統(tǒng)總體設計如圖1所示,主要包括軟件設計即人機界面設計和硬件設計兩大部分。人機界面為PC端上的圖形化控制臺,用于模擬汽車的制動信號和轉(zhuǎn)向信號以及車速信號等,通過串口將信號傳送給DSP,同時顯示由DSP送來的車輛偏離數(shù)據(jù)和實時道路場景。硬件部分由DSP構(gòu)成,負責實時車道檢測與識別,車道偏離量的計算。
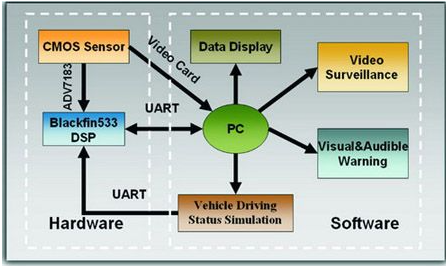
圖1系統(tǒng)設計
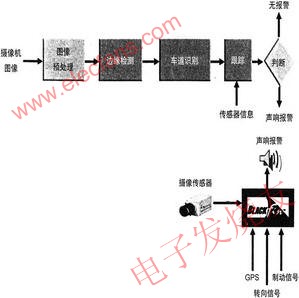
系統(tǒng)通過圖像傳感器獲取車道幾何結(jié)構(gòu),通過車輛運動參數(shù)傳感器獲取決策算法所必需的車輛運動參數(shù)如車速、車輛轉(zhuǎn)向狀態(tài)等,綜合分析判斷車輛偏離車道的程度。如果車輛偏離量超過設定閾值,控制臺界面上的報警燈將會閃亮,同時發(fā)出蜂鳴報警聲。
三、人機界面設計
在人機界面設計上采用VisualC++6.0開發(fā)環(huán)境和NI公司的Measurement Studio編程工具共同開發(fā),用VC完成程序的主要功能,用Measurement Studio的精美控件完成程序的界面編程。在系統(tǒng)與DSP通信上我們采用微軟公司的MSSCOM控件進行編程,減小工作量,降低開發(fā)難度。軟件系統(tǒng)分為三個模塊:顯示模塊、控制模塊、通信模塊。顯示模塊負責將DSP發(fā)來的報警信號,車道偏移信號進行圖形化顯示,控制模塊主要向DSP發(fā)送控制命令,通信模塊負責PC與DSP間信號的交互。人機界面各模塊間的關系如圖2所示。
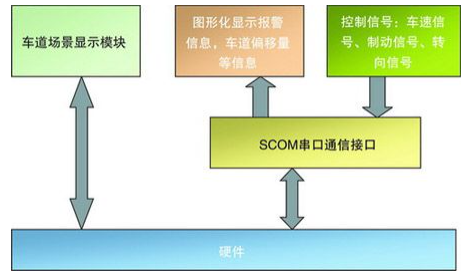
圖2人機界面設計
四、硬件設計
系統(tǒng)硬件主要是以DSP為核心的實時處理平臺,主要完成圖像采集、車道檢測與識別、車道偏移量計算等功能,并將計算結(jié)果傳送給控制臺界面作動態(tài)顯示。
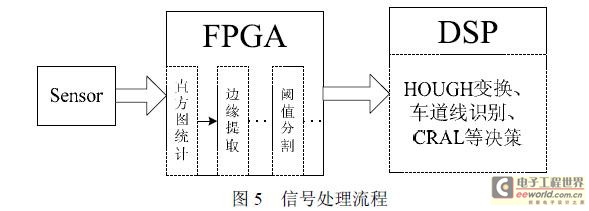
DSP硬件系統(tǒng)包括視頻A/D模塊、實時圖像處理模塊、視頻D/A模塊、UART通信模塊、外部儲存器模塊。視頻A/D模塊采用ADV7183視頻解碼芯片,圖像處理芯片采用ADI公司的Blackfin-533多媒體數(shù)字信號處理器,ADM3202RS-232通用異步收發(fā)器。DSP系統(tǒng)框圖如圖1左方虛線框所示。
在開發(fā)中我們采用ADI公司的BF-533EZ-KitLite評估板,該平臺具有良好的可操作性和豐富的外設接口,為我們降低了系統(tǒng)開發(fā)難度,節(jié)約了時間。
在DSP端,圖像經(jīng)CMOS攝像頭轉(zhuǎn)換成視頻信號送入ADV7183視頻編碼器,我們從解碼視頻流中的亮度分量獲得灰度圖像序列,首先進行圖像預處理,由3×3的高斯模板對圖像進行濾波,濾除部分隨機噪聲,然后進行車道標志檢測。由于結(jié)構(gòu)化道路上的車道標識線與路面背景具有較強的對比度,車道邊緣較明顯,因此利用邊緣檢測算法能夠較好地檢測出車道邊緣。目前較好的邊緣檢測算法是Canny法,檢測的車道邊緣準確,線條較細,但是計算量大。Sobel算法相對于Canny法的線條較粗,但計算量較小,便于實時系統(tǒng)應用。因此,系統(tǒng)采用了Sobel法,然后采用Ostu法對邊緣增強的圖像序列進行二值化,該算法能夠自動確定分割閾值,使前景與背景兩類的方差最大。
經(jīng)過分割后的二值圖像中包含了車道標識線,但還含有很多雜散線條,因此要對車道線進行識別,將其從雜散線條中提取出來。基于對道路的先驗知識,三維場景中的直線投影到二維平面上亦為直線,而實際道路中出現(xiàn)直道的概率遠大于彎道出現(xiàn)的概率,所以我們采用了簡化的道路模型,即直線車道模型。檢測直線的常用方法是Hough變換,由于標準Hough變換計算量太大,不能在DSP上實現(xiàn),我們將圖像按重要性分為三個區(qū)域如圖3所示。
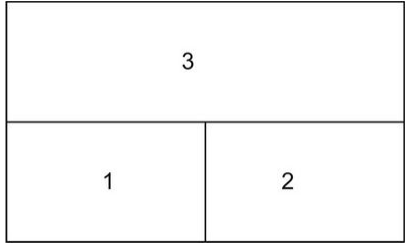
圖3圖像區(qū)域示意圖
我們只在區(qū)域1和區(qū)域2做Hough變換,區(qū)域3不做處理,并增大了Hough變換的角度搜索步長,進一步減小計算量。區(qū)域1中檢測到斜率在(0,90)度、長度為30像素以上的直線段判定為左車道,在區(qū)域2中檢測到的斜率在(0,-90)度、長度為30像素以上的直線段為右車道。
當車道檢測出來以后,需要根據(jù)車道信息判斷車輛在車道中的位置,因此車道偏離決策算法也是車道偏離報警系統(tǒng)的關鍵,它主要是確定一個合適的預警量向駕駛員提供報警,能夠保證及時和準確報警,同時不會對駕駛員造成過多的干擾。目前常用的偏離決策算法都需要對相機進行標定(如TLC方法),增加了系統(tǒng)的復雜性,并給安裝帶來不便。本系統(tǒng)采用的車道夾角法,不需要對相機進行標定,安裝時 保持相機與車輛平行即可。如果車輛的左右車道夾角之和超過某一設定閾值,則認為車輛偏離正常車道,系統(tǒng)根據(jù)當前行使狀況綜合判斷駕駛員是否無意識偏離了行車道,并發(fā)出報警,提醒駕駛員糾正行車路線。圖4為車道偏離算法流程圖。
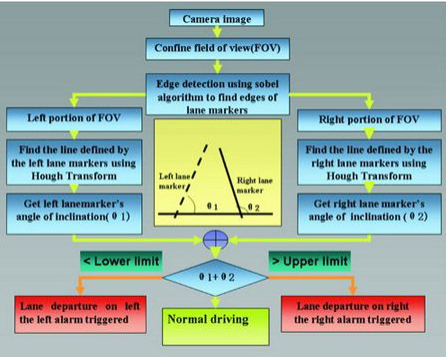
圖4車道偏離算法流程圖
五、仿真結(jié)果與分析
圖5(a)為車輛位于車道中心附近行駛,(b)為車輛位于車道偏左行駛,(c)為車輛位于車道偏右行駛,(d)(e)(f)分別為(c)(b)(c)所示行使狀態(tài)下的控制臺顯示界面。如(d)所示,當車輛位于車道中心附近行使時,車道偏移量的值在0值附近擺動,表示車輛并未發(fā)生偏離,此時偏離報警燈也未點亮。如(e)所示,當車輛無意識行駛到車道左邊時,車道偏移量在-20到-30之間擺動,此時左偏報警燈閃亮,同時發(fā)出較低頻率的蜂鳴報警聲,表示車輛向左偏離。當車輛偏向右邊車道時如(c)所示;偏移量的值在20到30之間變化,右偏報警燈閃亮,并發(fā)出較高頻率的蜂鳴報警聲,如圖(f)所示。
車輛在虛線道路上行駛的情況如圖6所示,(b)表示車道偏離量在0值附近變化,說明車輛沒有發(fā)生偏離,(c)為車輛左偏時的偏離量的值,其值在-20附近變化 ,(d)為車輛右偏時的偏離量值,其值在-20到-30之間變化。
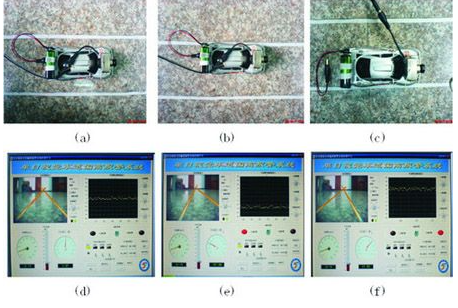
圖5車輛在實線車道上行駛的實驗結(jié)果
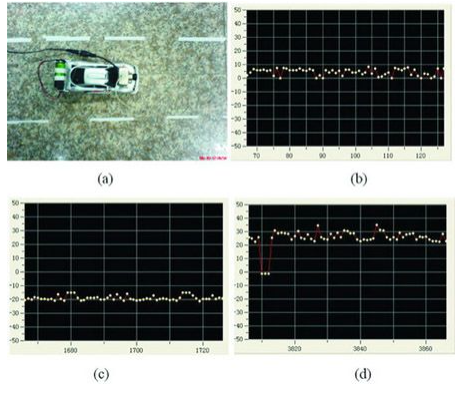
圖6
從以上模型車輛的實驗結(jié)果可以看出,系統(tǒng)能夠較好地適應不同線型的車道線,并能在模型車輛偏離時做出正確的判斷,發(fā)出不同的報警提示,達到了設計要求。
責任編輯:gt
-
傳感器
+關注
關注
2562文章
52559瀏覽量
763670 -
dsp
+關注
關注
555文章
8142瀏覽量
355205 -
報警系統(tǒng)
+關注
關注
5文章
653瀏覽量
75702
發(fā)布評論請先 登錄
用于ADSP-BF533和ADSP-BF561 Blackfin處理器的EZ-KIT Lite評估系統(tǒng)的Blackfin EZ擴展子板
基于Blackfin數(shù)字信號處理器的ADZS-BF533-EZLITE,ADSP-BF533 EZ-KIT Lite評估系統(tǒng)
基于圖像處理的車道偏離的研究和實現(xiàn)
基于機器視覺的車道偏離預警系統(tǒng)的實現(xiàn)
車道偏離報警(ldw)系統(tǒng)技術
ADSP-BF533 EZ-KIT Lite電路板設計數(shù)據(jù)庫

用于ADSP-BF533 EZ-KIT Lite和ADSP-BF561 EZ-KIT Lite的Blackfin EZ-Extender產(chǎn)品亮點
ADSP-BF533 EZ-KIT Lite<sup>?</sup>評估系統(tǒng)手冊
用于ADSP-BF533 Blackfin處理器的EZ套件精簡版產(chǎn)品亮點
BF533-EZ ADSP-BF533 EZ-Kit Lite評估硬件為評估ADSP-BF531、ADSP-BF532和ADSP-BF533 Blackfin處理器系列提供低成本硬件解決方案。
ADSP-BF533 EZ-KIT Lite電路板設計數(shù)據(jù)庫





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論