") 中外科研團隊研發(fā)柔性磁性薄膜能讓機器人的假肢指尖擁有超敏感觸覺
中外科研團隊研發(fā)柔性磁性薄膜能讓機器人的假肢指尖擁有超敏感觸覺

可以想象,在不久的將來,諸如洗碗、拖地、擦玻璃之類的家務都會由家用機器人來承擔,人類的雙手就能夠從繁瑣小事中進一步解放出來。
但是一個重要的前提是,這些機器人必須足夠完美——如果他們存在錯誤率,哪怕只有千分之一,就可能意味著,它在洗碗時,每 1000 個餐具中就會有 1 個掉在地上,而這是我們無法接受的。
因為之后恐怕會陷入一個惡性循環(huán)——地板不斷被餐具碎片覆蓋,機器人繼續(xù)清理,清理過程中會摔掉更多的盤子,循環(huán)往復,無休無止。
為了避免這種噩夢的發(fā)生,工程師們需要賦予機器人足夠敏銳的觸覺,最好是能夠達到接近人類的感知水平。
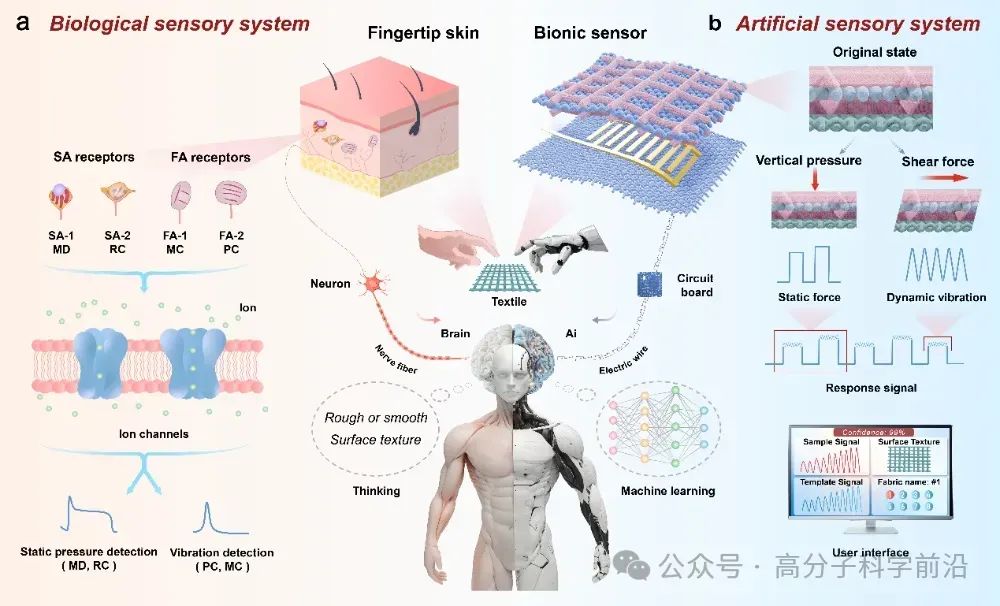
人類的皮膚可以感知法向力和剪切力的細微變化(即自解耦),并能夠以更高的分辨率感知刺激(即超分辨)。換句話說,人類的指尖可以感受到壓力和紋理,這主要歸功于皮膚上一種叫做機械感受器的特殊感覺細胞。
這些細胞連同整個神經(jīng)系統(tǒng),將來自環(huán)境的機械信息轉(zhuǎn)換成大腦可以理解的“觸覺”感知的信號。結合溫度感受器和痛覺感受器,人類就可以在不傷害自己的情況下完成對周圍環(huán)境的操控。
然而現(xiàn)有的機器人卻不具備精確的力解耦、以及適當?shù)目臻g分辨率,那么,如何才能讓機器人實現(xiàn)精準抓握,避免餐具破損或者給人類帶來損傷呢?
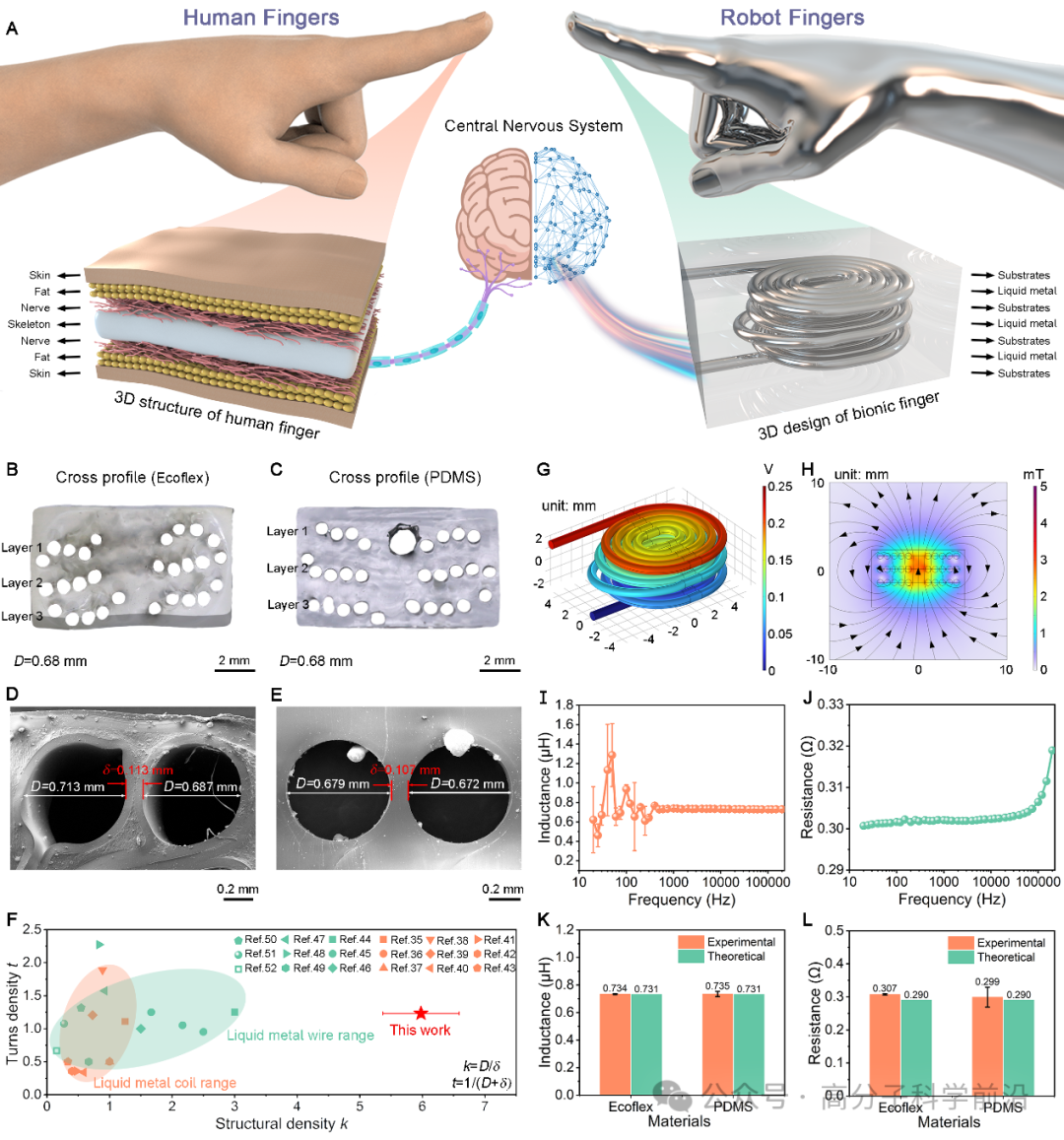
近日,香港城市大學、卡耐基梅隆大學、南方科技大學組建的科研團隊共同研發(fā)了一種機器人指尖“皮膚”——一種柔軟的正弦柔性磁化薄膜,厚度為 0.5 mm,這種薄膜會在設備內(nèi)部產(chǎn)生磁場。
支撐手指的“骨頭”是一塊電路板,上面布滿了傳感器,可以監(jiān)測磁場。例如,將一塊橡皮放在指尖上,手指的磁場就會因為皮膚凹陷發(fā)生微妙的變化,然后傳感器就會據(jù)此分析橡皮接觸的位置。如果用這些指尖拍一下仿人機器人上,機器就能夠很快明確手指和物體接觸的位置,進而提高抓地力。
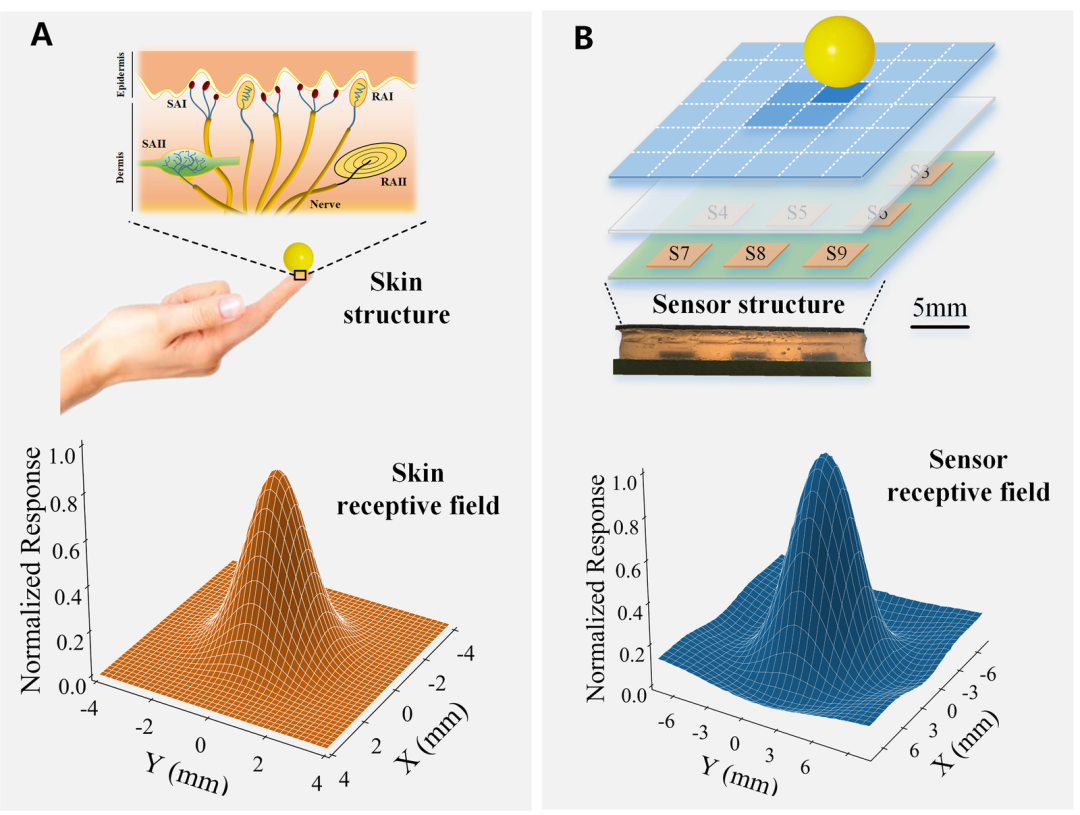
圖 | 磁性皮膚的結構(來源:Science Robotics)
他們將傳感器安裝在機器人手爪的指尖上,經(jīng)過反復試驗發(fā)現(xiàn),這種具有自解耦和超分辨能力的軟觸覺傳感器可精確測量法向力和剪切力(一維演示),并通過深度學習將超分辨精度提高了 60 倍——機器人可在外界干擾下穩(wěn)定地抓取易碎物體,并能夠通過遙控操作完成穿針等任務。
該研究成果發(fā)表在《科學·機器人》(Science Robotics)雜志上,標題為《實現(xiàn)自解耦與超分辨率觸覺感知的柔性磁性皮膚》(Soft magnetic skin for super-resolution tactile sensing with force self-decoupling)。
“有了觸覺反饋,家用機器人與人的互動會安全得多,而且機器人可以完成以前無法完成的更具挑戰(zhàn)性的任務,比如靈巧的抓取和操作。”香港城市大學生物醫(yī)學工程系的計算機科學家,上述論文的第一作者閆友璨表示。
這種磁性皮膚的敏感程度:當物體劃過“指尖”時,該系統(tǒng)不僅能感知到物體觸碰到的地方,還能感知到物體的形狀。
哥倫比亞大學機器人學家 Matei Ciocarlie 評論道:“這項工作是觸覺傳感領域中令人興奮的新浪潮的一部分,即人們正在制造的傳感器,能夠提供極其豐富的原始數(shù)據(jù),而這些數(shù)據(jù)卻不一定是為了供人類使用的。”
有趣的是,Ciocarlie 在哥倫比亞大學的團隊也開發(fā)出了一種類似的機械手指,但這種手指利用的不是磁力而是光——機械手指的“骨頭”上布滿了發(fā)光二極管(LED)和光電二極管,可在皮膚變形時檢測結構內(nèi)部的光如何發(fā)生變化。
事實上,這兩種方法的初衷都是為了攻克機器人靈巧度欠缺的問題。如果要讓這些機器在人類世界里發(fā)揮真正的作用,例如零失誤地做完家務,他們就必須變得更加敏感,而在提升機器人觸覺感知方面,顯然我們還將有很長的路要走。
據(jù)悉,在不久的將來,研究人員可能將這種指尖整合到假肢中,讓截肢者通過假肢獲得更豐富的觸摸體驗。
不管怎樣,新型磁性皮膚等類似的研究成果表明,科學家們在為機器人開發(fā)感官功能時,并不需要完全復制人類的生物學特征。因為,當我們試圖將人類的身體功能復制到機器人身上時,反而會形成某種局限性,或許我們可以讓機器人擁有超出人類想象的敏感性。
本文介紹的這項研究恰恰為觸覺傳感器的研發(fā)與設計提供了全新的思路,并有助于機器人領域的人機交互、自適應抓取和靈巧操作等各種應用的開發(fā)。
編輯:jq
-
傳感器
+關注
關注
2565文章
53008瀏覽量
767441 -
機器人
+關注
關注
213文章
29748瀏覽量
212884 -
電路板
+關注
關注
140文章
5136瀏覽量
102644
原文標題:中外科研團隊研發(fā)柔性磁性薄膜,讓機器人與假肢的“指尖”擁有超敏感觸覺
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
南京工業(yè)大學:仿生觸覺傳感系統(tǒng)讓機器人擁有“人類指尖”般的細膩感知
腦機接口柔性微電極植入機器人問世
中科院理化所:仿生指尖!研究空間各向異性液態(tài)金屬電感傳感器實現(xiàn)超寬量程、高線性度與卓越穩(wěn)定性,觸
漢威科技柔性觸覺傳感器:為人形機器人裝上“中國觸覺”

漢威科技柔性觸覺傳感器助力手術機器人發(fā)展
寧德時代自研機器人團隊成立
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
中國科大:在機器人觸覺傳感器研究中取得重要進展

這批中國企業(yè),在做人形機器人觸覺傳感器
觸覺傳感器的發(fā)展,對機器人產(chǎn)業(yè)有什么影響?
AMD贊助多支FIRST機器人競賽團隊

柔性電子技術革新與人形機器人的電子皮膚應用前景

人形機器人感知變化的未來

柔性機器人與剛性機器人區(qū)別與聯(lián)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論