") 基于TMS320C6000 DSP芯片實(shí)現(xiàn)視頻檢測(cè)系統(tǒng)的設(shè)計(jì)
基于TMS320C6000 DSP芯片實(shí)現(xiàn)視頻檢測(cè)系統(tǒng)的設(shè)計(jì)
提出一種基于虛擬線的交通參數(shù)(車速、車輛計(jì)數(shù)等)視頻檢測(cè)方法。通過(guò)檢測(cè)在實(shí)時(shí)圖像序列中設(shè)置的虛擬線,檢測(cè)車輛存在,進(jìn)而計(jì)算出車速、車流量等交換信息。該方法自適應(yīng)更新背景和閾值,具有較高的檢測(cè)精度和良好的抗干擾性,避免了大量乘法運(yùn)算,有效地提高了檢測(cè)速度,具有良好的實(shí)時(shí)性。
目前,交通問(wèn)題已成為城市發(fā)展的主要制約因素之一。ITS(Intelligent Transportation System)智能交通系統(tǒng),是指將先進(jìn)的信息技術(shù)、數(shù)據(jù)通訊技術(shù)、自動(dòng)控制技術(shù)、計(jì)算機(jī)處理技術(shù)等應(yīng)用于交通運(yùn)輸,實(shí)現(xiàn)交通信息管理現(xiàn)代化。目前國(guó)內(nèi)外對(duì)ITS已經(jīng)有了較深入的研究和實(shí)踐。近20年的研究表明:實(shí)行ITS,可以使道路的通行能力提高2~3倍,將產(chǎn)生巨大的經(jīng)濟(jì)效益和社會(huì)效益。
交通視頻檢測(cè)設(shè)備是ITS的重要組成部分,它實(shí)時(shí)地檢測(cè)交通參數(shù),進(jìn)行數(shù)據(jù)處理并傳送至交管中心。傳統(tǒng)的檢測(cè)方法是在車道下埋置磁感應(yīng)線圈,當(dāng)有車輛經(jīng)過(guò)時(shí),產(chǎn)生一個(gè)電信號(hào),檢測(cè)出這輛車正在感應(yīng)線圈的位置。根據(jù)一車輛通過(guò)不同的感應(yīng)線圈的時(shí)間間隔Δt和兩個(gè)感應(yīng)線圈之間的距離L,求得車速v=L/Δt。
本文提出的視頻檢測(cè)方法,首先在圖像上設(shè)置虛擬線,虛擬線的作用與上述磁感應(yīng)線圈類似。根據(jù)虛擬線上像素點(diǎn)的數(shù)值變化判斷是否有車經(jīng)過(guò)檢測(cè)線。如果當(dāng)前檢測(cè)線上的數(shù)值大于背景估計(jì)值,則認(rèn)為有車輛經(jīng)過(guò)檢測(cè)線,從而檢測(cè)出車輛。由于背景的變化,必須實(shí)時(shí)更新背景的估計(jì)值,才能夠保證檢測(cè)的精度。
1 虛擬線檢測(cè)算法
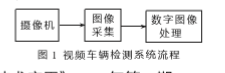
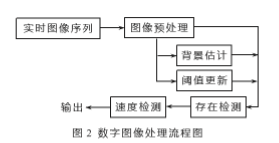
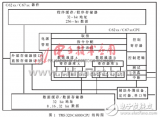
視頻車輛檢測(cè)流程如圖1所示,用一個(gè)架設(shè)在車道上方的攝像頭同時(shí)監(jiān)視多個(gè)車道,攝像頭采集的圖像以25幀/秒(PAL)的速度進(jìn)入圖像采集模塊,得到數(shù)字化的圖像(YUV 4:2:2),數(shù)字圖像數(shù)據(jù)進(jìn)入圖像處理模塊,這個(gè)模塊是整個(gè)系統(tǒng)的核心,實(shí)現(xiàn)對(duì)實(shí)時(shí)動(dòng)態(tài)圖像的分析處理,檢測(cè)出多項(xiàng)交通信息。圖像處理流程如圖2所示。
1.1 攝像機(jī)的安裝與虛擬線的實(shí)際距離
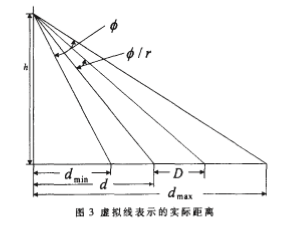
圖3中:φ為攝像機(jī)的視場(chǎng)(FOV)角度;
φ/r為一條檢測(cè)線對(duì)應(yīng)的角度;
D是一條檢測(cè)線對(duì)應(yīng)的實(shí)際距離;
r是圖像的垂直分辨率(一幅圖像的行數(shù))。
實(shí)際應(yīng)用中,根據(jù)圖3所示的視頻角度(FOV),攝像機(jī)比較理想的安裝高度應(yīng)該在7.5m~10m的范圍內(nèi),并且保證監(jiān)視的視場(chǎng)能夠覆蓋1~4條車道。
在機(jī)器視覺(jué)系統(tǒng)中,一行掃描線代表的實(shí)際距離與攝像機(jī)的安裝密切相關(guān),本系統(tǒng)中由三個(gè)參數(shù)確定,分別是攝像機(jī)的安裝高度(h)、光軸與垂直方向的角度及視場(chǎng)(FOV),各參數(shù)間的關(guān)系如圖3。式(1)為每條檢測(cè)線代表的實(shí)際距離:
D=htan[arctan(d/h) φ/r]-d (1)
由圖3所示幾何關(guān)系,容易得到圖像覆蓋的實(shí)際最大距離為:
dmax=htan[arctan(dmin/h) φ] (2)
顯然攝像機(jī)能夠監(jiān)視的最大距離dmax用安裝高度h、最小距離dmix和FOV角度φ決定。
1.2 背景估計(jì)和車輛檢測(cè)
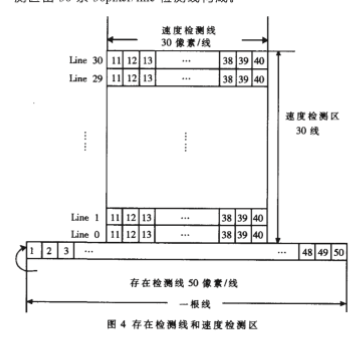
一條道路通常被分為幾條車道,在每條車道上分別設(shè)置如圖4(圖中數(shù)字1,2,3…表示像素點(diǎn))所示的檢測(cè)區(qū)。每個(gè)檢測(cè)區(qū)由一條車輛存在檢測(cè)線和緊跟其后的速度檢測(cè)區(qū)構(gòu)成。存在檢測(cè)線長(zhǎng)度為50pixel/line,速度檢測(cè)區(qū)由30條30pixel/line檢測(cè)線構(gòu)成。
判斷存在檢測(cè)線上是否有車通過(guò)的基本原理是:如果當(dāng)前幀檢測(cè)上像素點(diǎn)的灰度值明顯大于背景的估計(jì)值,認(rèn)為這一時(shí)刻檢測(cè)線上有車輛存在,否則認(rèn)為此刻檢測(cè)線上無(wú)車輛存在。
由于環(huán)境的變化,必須實(shí)時(shí)更新存在檢測(cè)線的背景估計(jì)值。把一條檢測(cè)線上對(duì)應(yīng)五個(gè)不同時(shí)刻(相鄰時(shí)刻的間隔是10幀)的像素點(diǎn)的灰度值存入緩沖區(qū),用lineTn(n=1,2…)表示第n時(shí)刻檢測(cè)線上的數(shù)據(jù)。這樣連續(xù)5個(gè)時(shí)刻的數(shù)據(jù)為一組,通過(guò)對(duì)連續(xù)兩組數(shù)據(jù)的比較計(jì)算來(lái)更新背景的估計(jì)值。例如,當(dāng)前緩沖區(qū)存的是lineT1到linet5,那么輸入的lineT6與lineT1的間隔是50幀(2s,PAL制),這樣在車速大于20km/h,車長(zhǎng)小于1lm的條件下(通常情況下滿足此條件),不可能有同一車輛既經(jīng)過(guò)lineT1又經(jīng)過(guò)lineT6,定義一個(gè)變量如(3)式:
式(3)中s‘I是lineT(1 j)是第i個(gè)像素點(diǎn)的灰度值,si是lineT(6 j)的第i個(gè)像素點(diǎn)的灰度值(j=0,1,2,3,4)。把第一組數(shù)據(jù)和第二組數(shù)據(jù)比較,即lineT1與6,2與7,3與8,4與9,5與10分別逐像素點(diǎn)地比較,由式(3)得到5個(gè)變量,然后lineT6~10覆蓋lineT1~5存入緩沖區(qū),用lineT6~10和lineT11~15重復(fù)上述計(jì)算過(guò)程。通過(guò)比較lineT1~5和lineT6~10兩組數(shù)據(jù)得到的5個(gè)變量中,第j個(gè)變量Vj最小,令Vmin=Vj,與這個(gè)最小值對(duì)應(yīng)的后一組數(shù)據(jù)中的lineT(6 j)用于存在檢測(cè)線的背景估計(jì)。檢測(cè)線的背景估計(jì)通過(guò)式(4)的經(jīng)驗(yàn)公式更新。
R’i=ωRi (1-ω)Bi i=1,…,50 (4)
式(4)中Ri是檢測(cè)線上第i點(diǎn)的背景估計(jì)值,Ri是該點(diǎn)上一次的估計(jì)值,Bi是后一組數(shù)據(jù)中對(duì)應(yīng)于最小變量值Vmin的檢測(cè)線上第i點(diǎn)的值。ω是權(quán)系數(shù),它決定了上一次的背景估計(jì)值對(duì)當(dāng)前背景估計(jì)值的影響,(1-ω)決定了對(duì)應(yīng)于Vmin的檢測(cè)線數(shù)據(jù)對(duì)于背景估計(jì)的影響。如果ω=1,當(dāng)前背景估計(jì)等于上一次背景估計(jì);如果ω=0,當(dāng)前背景估計(jì)完全被對(duì)應(yīng)于Vmin的檢測(cè)線數(shù)據(jù)代替。為了達(dá)到實(shí)時(shí)更新背景的目的,ω的值應(yīng)該較小,但是為了提高抗干擾能力,ω的值應(yīng)該較大,綜合兩方面的考慮,實(shí)際系統(tǒng)中取固定值ω=0.8。通過(guò)上述計(jì)算過(guò)程,檢測(cè)線上的背景估計(jì)值每隔2s更新一次,對(duì)于緩慢變化的環(huán)境,能夠得到實(shí)時(shí)準(zhǔn)確的背景估計(jì)。
如果一條檢測(cè)線上像素點(diǎn)的值比與它比較的檢測(cè)線上相應(yīng)點(diǎn)的值高得多(或低得多),由(3)式得到V‘,而兩條檢測(cè)線上對(duì)應(yīng)點(diǎn)的值基本相同時(shí)得到V’’,那么V’會(huì)明顯大于V‘’,這就是進(jìn)行車輛檢測(cè)的基本依據(jù)。定義變量:

式(5)中Li是當(dāng)前時(shí)刻檢測(cè)線上第I點(diǎn)的值,R‘i是背景估計(jì)值。
當(dāng)VD大于選定的閾值時(shí),認(rèn)為檢測(cè)線上有車輛存在。式(6)是閾值表達(dá)式:
T=kVmin (6)
式(6)中Vmin是當(dāng)前最小的變化值,對(duì)應(yīng)于Bi,k是常數(shù),如果
VD>T (7)
說(shuō)明當(dāng)前時(shí)刻檢測(cè)線上的值大于背景估計(jì)值,此時(shí)檢測(cè)出有車輛經(jīng)過(guò)存在檢測(cè)線。
1.3 速度檢測(cè)
如圖4所示,速度檢測(cè)區(qū)緊跟在存在檢測(cè)線之后,當(dāng)存在檢測(cè)線檢測(cè)到有車輛經(jīng)過(guò)時(shí),觸發(fā)速度檢測(cè)區(qū)工作。為了避免車高的影響,當(dāng)車輛相對(duì)攝像機(jī)的監(jiān)視方向運(yùn)動(dòng)時(shí),應(yīng)該按照車頭的位置計(jì)算速度。而當(dāng)車輛運(yùn)動(dòng)方向與攝像機(jī)的監(jiān)視方向相同時(shí),應(yīng)該按照車尾的位置計(jì)算速度。
以前一種情況為例,一旦檢測(cè)到車輛進(jìn)入速度檢測(cè)區(qū),速度檢測(cè)模塊依次檢測(cè)每條虛擬線(從Line0開(kāi)始),方法與存在檢測(cè)算法相同,當(dāng)檢測(cè)到連續(xù)兩條虛擬線都沒(méi)有車輛存在停止。認(rèn)為這兩條線的前一條就是車頭的位置l0,下一幀的檢測(cè)就從這條線開(kāi)始。一幀一幀重復(fù)上述過(guò)程,直到車頭位置超出了速度檢測(cè)區(qū),那么上一幀得到的車頭位置ln就是車頭最后的位置。車速為:
Vf=[(ln-lo)/n]25(lines/s) (8)
計(jì)算ln-l0是必須的,因?yàn)檐囶^的開(kāi)始位置和最后位置在每次測(cè)量時(shí)并不是固定的。適當(dāng)設(shè)置30條虛擬線組成的速度檢測(cè)區(qū),使ln-l0的最小值是20,則由檢測(cè)線引起的最大量化誤差是1/20。
由圖3所示的幾何關(guān)系,(8)式的速度值能夠轉(zhuǎn)換成m/s為單位的實(shí)際速度,與ln-l0對(duì)應(yīng)的實(shí)際距離為:
D=D0-Dn (9)
式(9)中Δθ=φ/r
θ為line0與垂直方向的角度,則實(shí)際速度為:
V=(D/n)25(m/s) (10)
2 系統(tǒng)實(shí)現(xiàn)
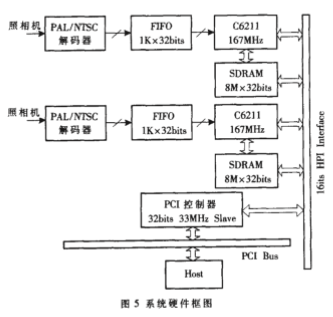
如圖5所示,本系統(tǒng)選用TMS320C6000系列的DSP芯片作為處理器,采用雙處理器的硬件結(jié)構(gòu),每個(gè)視頻通道處理一路視頻輸入,可以同時(shí)檢測(cè)兩個(gè)方向的交通信息。本系統(tǒng)在CCS2.2環(huán)境下開(kāi)發(fā)系統(tǒng)底層程序,在VC.net環(huán)境下開(kāi)發(fā)系統(tǒng)上層操作程序,系統(tǒng)運(yùn)行情況良好。
3 實(shí)驗(yàn)結(jié)果
用10個(gè)視頻序列(每個(gè)序列3分鐘,25f/s攝像機(jī)高h(yuǎn)=7.5m,視場(chǎng)FOV≈40)對(duì)該系統(tǒng)進(jìn)行測(cè)試。實(shí)驗(yàn)證明在環(huán)境光線良好的條件下,車輛計(jì)數(shù)的準(zhǔn)確率在95%以上;在較差的光線條件下,車輛計(jì)數(shù)的準(zhǔn)確率在90%以上,速度參數(shù)計(jì)算誤差小于5%。
基于虛擬線的視頻檢測(cè)技術(shù)最大的優(yōu)點(diǎn)是算法簡(jiǎn)單、計(jì)算量小,適合對(duì)實(shí)時(shí)性要求較高的場(chǎng)合,例如,根據(jù)檢測(cè)結(jié)果抓拍車輛圖像的應(yīng)用。該算法還有待于進(jìn)一步優(yōu)化,如可以加入?yún)^(qū)配和跟蹤模塊;可以利用圖像的更多特點(diǎn),例如色度、邊緣、角點(diǎn)等不斷優(yōu)化算法。
責(zé)任編輯:gt
-
dsp
+關(guān)注
關(guān)注
555文章
8142瀏覽量
355228 -
芯片
+關(guān)注
關(guān)注
459文章
52181瀏覽量
436169 -
攝像頭
+關(guān)注
關(guān)注
61文章
4949瀏覽量
97662
發(fā)布評(píng)論請(qǐng)先 登錄
基于TMS320C6000和同步FIFO的多DSP系統(tǒng)設(shè)計(jì)與

TMS320C6000系列DSP主機(jī)引導(dǎo)方式的實(shí)現(xiàn)
基于TMS320C6000的優(yōu)化策略分享
TMS320C6000系列DSP優(yōu)化介紹
關(guān)于TMS320C6000 DSP的復(fù)位電路

dsp tms320c6000基本作用的認(rèn)識(shí)
TMS320C6000 EMIF到TMS320C6000主機(jī)端口接口

TMS320C6000 DSP的復(fù)位電路
TMS320C6000 DSP關(guān)斷邏輯和模式參考指南
TMS320C6000 DSP EMAC/MDIO模塊參考指南
TMS320C6000 DSP外設(shè)概述參考指南





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論