 給KUKA-C4機器人導入長文本方法
給KUKA-C4機器人導入長文本方法
如果已經分配輸入 / 輸出端、標志位或名稱,則可以將這些名稱 (所謂的 “長文本 ”)導出到一個文件中。同樣也可以導入具有長文本名稱的文件。用這個方法,重新安裝之后就不必在每臺機器人上手動輸入長字段文字。
長文本可導出到一個 U 盤或機器人數據窗口的網絡存檔路徑欄位中所確定的目錄里。相同的目錄也作為導入來源使用。
僅限于導入:
1.長文本名稱在 TXT 或 CSV 文件中。
2.文件的結構確保文件可導入。
從長文本導出中生成的文件,已自動具有相應結構,確保其可被重新導入。如果應手動將名稱寫入一個文件,則建議首先在機器人控制系統中分配幾個虛擬長文本,然后導出并將名稱寫入文件。
操作步驟
1. 當使用 U 盤時,將其插在控制柜或 smartPAD 上。
2. 在主菜單中選擇 投入運行 > 售后服務 > 長文本。窗 口 長文本即自動打開。
3. 根據需要選擇選項卡 輸出或輸入。進行所需的設置。
4. 點擊按鍵 輸出或輸入。
導入結束后,屏幕將出現信息提示輸入成功。
導出結束后,屏幕將出現信息提示輸出成功。
選項卡輸出:
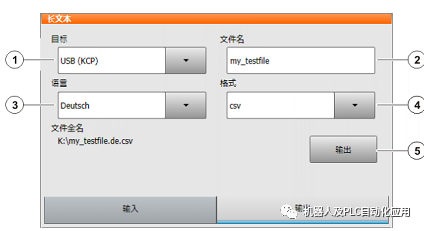
1. 選擇文件的導出位置。
只有當機器人數據窗口中配置有一個路徑時,此處才可選擇網絡這一選項。
2 .給出所要的文件名。
如果項號 1 中已選定網絡時,則顯示機器人數據窗口中配置的存檔名。可在此處更改名稱。在機器人數據窗口中不會由此改變。根據所選的語言,該文件名還將配上自動附注。
3.語言
選擇要從哪種語言中導出長文本。如果已經將 smartHMI 語言設置為 “ 英語 ”,在此選擇 “Italiano” 時,則會創建有附注“it” 的文件。該文件包含已經保存為意大利語 smartHMI 的長文本。也可以選擇所有語言。
4.選擇所要的文件格式。
5. 啟動導出。
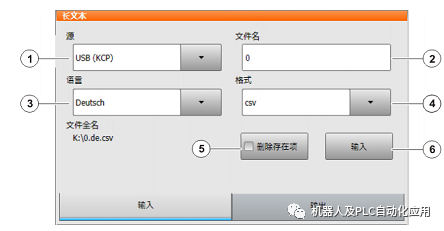
選項卡輸入:
原文標題:KUKA-C4機器人 導出 / 導入長文本
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
213文章
29492瀏覽量
211558
原文標題:KUKA-C4機器人 導出 / 導入長文本
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論