") 美國(guó)癱瘓患者用腦信號(hào)使用雙機(jī)械臂吃蛋糕
美國(guó)癱瘓患者用腦信號(hào)使用雙機(jī)械臂吃蛋糕
上個(gè)月,癱瘓 30 多年的羅伯特·布茲·克米勒維斯基(Robert Buz Chmielewski)向世界展示了如何通過大腦,控制兩支機(jī)械手臂拿起餐具給自己喂食的全過程。
在視頻中,Chmielewski 通過自己的大腦信號(hào)使用刀叉切割食物,隨后命令機(jī)械手臂將食物帶到嘴邊幾英寸處,進(jìn)而吃掉。
Chmielewski 的成就標(biāo)志著,受疾病或傷害影響的患者將向恢復(fù)自控能力邁出了一大步,第一次,人類可以用雙側(cè)大腦植入物使截癱患者控制兩條機(jī)械手臂,并產(chǎn)生了兩手觸摸的感覺。
解碼腦信號(hào) 控制雙臂
Chmielewski 是一名 C6 脊髓損傷的患者,他的大腦健康,脖子以下神經(jīng)完好無損,但肩膀以下均為癱瘓狀態(tài),僅剩肩膀和手腕的一些殘余功能。2019 年 1 月,Chmielewski 作為約翰斯·霍普金斯大學(xué)一項(xiàng)腦機(jī)接口研究的參與者,通過一次長(zhǎng)達(dá) 10 小時(shí)的手術(shù),將六個(gè)微電極陣列(MEA)植入大腦兩側(cè)。隨后,研究者一直試圖通過不斷的改善和訓(xùn)練,讓他獲得同時(shí)控制兩個(gè)假肢的能力。
據(jù)悉,這項(xiàng)由國(guó)防高級(jí)研究計(jì)劃局(DARPA)撥款,由約翰·霍普金斯大學(xué)的物理醫(yī)學(xué)與康復(fù)學(xué)系(PM&R)、應(yīng)用物理實(shí)驗(yàn)室(APL)、神經(jīng)內(nèi)科與神經(jīng)外科共同合作的臨床研究,旨在研究可以幫助癱瘓和肢體殘缺患者獲得更加獨(dú)立生活能力的技術(shù)。
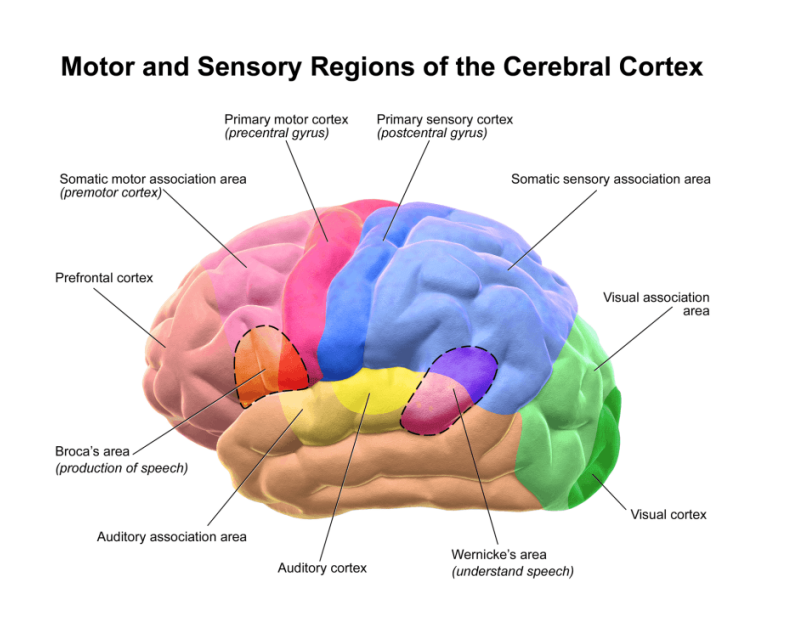
該團(tuán)隊(duì)的主要方法是,將六個(gè)微電極陣列(MEA)分別植入到參與者的大腦兩個(gè)半球中,其中一半在運(yùn)動(dòng)皮層中,另一半在感覺皮層中。
眾所周知,運(yùn)動(dòng)皮層是額葉的一個(gè)區(qū)域,位于中央溝前的后中央回的一大塊灰質(zhì),在解剖學(xué)上稱“中央前回”,亦稱“第Ⅰ軀體運(yùn)動(dòng)區(qū)”。它是大腦皮層中參與計(jì)劃、控制和執(zhí)行自主運(yùn)動(dòng)的區(qū)域,支配軀體各部分的運(yùn)動(dòng),電刺激該部位會(huì)引起運(yùn)動(dòng)反應(yīng)。
感覺皮層則是負(fù)責(zé)接收和解讀來自身體不同部位的感覺信息。從不同的感受器(例如傷害感受器和熱感受器)接收的刺激被轉(zhuǎn)導(dǎo)為動(dòng)作電位,該動(dòng)作電位可以沿著一個(gè)或多個(gè)傳入神經(jīng)元傳遞到大腦的特定部位。
在該項(xiàng)目中,MEA 可以繞過受損的脊髓,讀取大腦產(chǎn)生的運(yùn)動(dòng)信號(hào),并刺激感覺信號(hào)。此外,這些 MEA 還可以通過電線連接到機(jī)械臂(或其他效應(yīng)器,如光標(biāo)屏幕,虛擬效應(yīng)器等),從而允許來自大腦的神經(jīng)信號(hào)向其他設(shè)備發(fā)送消息,反之亦然。
在實(shí)驗(yàn)中,研究小組植入的 MEA 允許計(jì)算機(jī)讀取來自參與者運(yùn)動(dòng)皮層的信號(hào),這些信號(hào)傳達(dá)了運(yùn)動(dòng)意圖。緊接著,計(jì)算機(jī)解碼這些信號(hào)并將其發(fā)送到機(jī)械臂,從而使參與者可以像他真實(shí)的手臂一樣,控制其運(yùn)動(dòng)。
此外,研究小組通過多電極陣列讀取大腦信號(hào)的方法,有助于開發(fā)一種機(jī)器學(xué)習(xí)算法,該算法可解碼用戶的意圖,并將其轉(zhuǎn)變?yōu)樘囟ǖ纳窠?jīng)信號(hào)模式,最后通過計(jì)算機(jī)的轉(zhuǎn)換以指導(dǎo)手臂運(yùn)動(dòng)。隨著 Chmielewski 在腦機(jī)接口上進(jìn)行更多的訓(xùn)練,該算法“學(xué)習(xí)”他的想法,然后移動(dòng)手臂,最終會(huì)變得越來越熟練。
除了控制義肢,團(tuán)隊(duì)還設(shè)想,MEA 還應(yīng)當(dāng)可以讓參與者使用神經(jīng)信號(hào)來控制計(jì)算機(jī)上的光標(biāo)或向智能家居設(shè)置、提供指令。
雙邊植入 模擬觸感
盡管控制癱瘓肢體對(duì)于癱瘓者來說是一項(xiàng)開創(chuàng)性的工作,但這只能解決一半的問題。如果沒有感覺的反饋,參與者控制的,實(shí)際上只是兩只麻木的手臂。沒有感官反饋,參與者很難使用正確的力量來拿起杯子,因此,觸感可以讓參與者無需看手臂就能知道手臂的位置。
和其它腦機(jī)接口不同的是,該團(tuán)隊(duì)不僅構(gòu)建了一種可以讀取神經(jīng)信號(hào)并將其轉(zhuǎn)化為運(yùn)動(dòng)的解碼器,還最先在大腦兩個(gè)半球植入 MEA ,使參與者在獨(dú)立控制左右機(jī)械臂的同時(shí),還能感知雙手的觸感。
該團(tuán)隊(duì)將 MEA 植入到參與者的感覺皮層中的目的,就是模擬感覺,以便在觸摸假肢時(shí),參與者將能夠感覺到觸碰,并精確定位其位置。
當(dāng)參與者想要移動(dòng)手臂時(shí),神經(jīng)信號(hào)從他的大腦傳播到計(jì)算機(jī),再到假肢。當(dāng)假肢手指觸摸到某物時(shí),微小的傳感器會(huì)將信息發(fā)送回他的大腦。對(duì)于參與者而言,即使信號(hào)反方向流動(dòng),他的感覺依舊像是他在用真正的手觸摸某物。
在一次采訪中,Chmielewski 表示:“他們(手臂)接觸的地方變化時(shí),我會(huì)有不同的感覺。” “壓力變化的范圍,從像有人在握住你的手,到細(xì)砂紙摩擦手指。”
“我們的最終目標(biāo)是使諸如飲食之類的活動(dòng)容易完成,讓機(jī)器人完成一部分工作,并讓參與者負(fù)責(zé)細(xì)節(jié):吃什么、在哪里切、切多大塊。”專門從事人機(jī)協(xié)作的 APL 高級(jí)機(jī)器人專家 Handelman 解釋道,“通過將腦機(jī)接口信號(hào)與機(jī)器人技術(shù)、人工智能相結(jié)合,我們可以使人類專注于其它更加的重要事情中去。”
APL 神經(jīng)科學(xué)家 Tenore 則表示,下一步,這項(xiàng)工作將不僅要增加參與者可以通過人機(jī)協(xié)作展示的日常生活活動(dòng)的數(shù)量和類型,“此外,在執(zhí)行這些任務(wù)時(shí)為他提供更多的感官反饋,這樣他就不必完全依靠視覺來知道他是否成功”。
原文標(biāo)題:美國(guó)癱瘓患者用“大腦意念”使用雙機(jī)械臂吃蛋糕
文章出處:【微信公眾號(hào):DeepTech深科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
信號(hào)
+關(guān)注
關(guān)注
11文章
2844瀏覽量
77946
原文標(biāo)題:美國(guó)癱瘓患者用“大腦意念”使用雙機(jī)械臂吃蛋糕
文章出處:【微信號(hào):deeptechchina,微信公眾號(hào):deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
海康威視推出大模型機(jī)械臂防碰撞相機(jī)
如何使用PLC控制myCobot 320機(jī)械臂

使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站

深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的?

RK3568國(guó)產(chǎn)實(shí)驗(yàn)箱+人工智能機(jī)械臂:跳舞、疊羅漢、夾方塊、積木搬運(yùn)案例全解!
馬斯克Neuralink啟動(dòng)腦機(jī)接口控制機(jī)械臂試驗(yàn)
凌科電氣新品發(fā)布:揭秘機(jī)械臂高可靠連接器解決方案
“雙保險(xiǎn)”鎖緊機(jī)制:YM28系列連接器為機(jī)械臂提供高牢靠的大電流連接

機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
工業(yè)產(chǎn)線機(jī)械臂數(shù)字孿生 流程工業(yè)應(yīng)用

OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開發(fā)指南

工業(yè)機(jī)器人和機(jī)械臂的設(shè)計(jì)、功能和應(yīng)用有哪些區(qū)別?
奧比中光推出2.0版大模型機(jī)械臂
大象機(jī)器人開源協(xié)作機(jī)械臂機(jī)械臂接入GPT4o大模型!

國(guó)產(chǎn)Cortex-A55人工智能教學(xué)實(shí)驗(yàn)箱_基于Python機(jī)械臂跳舞實(shí)驗(yàn)案例分享
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論